视觉制导激光针灸机器人的制作方法
1.本发明涉及机械臂技术领域,尤其涉及视觉制导激光针灸机器人。
背景技术:
2.机械臂是指高精度,多输入多输出、高度非线性、强耦合的复杂系统。因其独特的操作灵活性,已在工业装配,安全防爆等领域得到广泛应用。
3.机械臂是一个复杂系统,存在着参数摄动、外界干扰及未建模动态等不确定性。因而机械臂的建模模型也存在着不确定性,对于不同的任务,需要规划机械臂关节空间的运动轨迹,从而级联构成末端位姿。
4.针灸是一种中国特有的治疗疾病的手段,是针法和灸法的总称。它是一种“内病外治”的医术。是通过经络、腧穴的传导作用,以及应用一定的操作法,来治疗全身疾病。尤其是针法,针法是指在中医理论的指导下把针具(通常指毫针)按照一定的角度刺入患者体内,运用捻转与提插等针刺手法来对人体特定部位进行刺激从而达到治疗疾病的目的。灸法是以预制的灸炷或灸草在体表一定的穴位上烧灼、熏熨,利用热的刺激来预防和治疗疾病。
5.现在临床上仍是由医护人员手动操作,针灸治疗对于医院人力资源的消耗很大,需要一种手段使得针灸过程更加自动化、智能化。
技术实现要素:
6.本发明旨在提供一种操控便捷,可基于激光追踪穴位从而确保良好治疗效果的针灸机器人。
7.为达到上述目的,本发明是采用以下技术方案实现的:
8.视觉制导激光机器人,包括机架、机械臂外展定位摄像头、机械臂、万向节激光头、微调辅助摄像头以及120度旋转外展臂,所述机械臂中段设有涡轮齿条伸缩机构,机械臂伸缩方向为机械臂自身所在直线方向,机械臂一端通过360度旋转机构与机架配合连接,机械臂另一端与120度旋转外展臂其中一端配合连接,所述120度旋转外展臂另一端与万向激光头通过万向节铰接,所述机架呈长方体状,机械臂外展定位摄像头设置于机架顶面,所述微调辅助摄像头设置于万向节激光头侧面;
9.还包括处理器、热成像传感器、红外位移传感器、双色指示灯以及2个舵机。
10.优选的,还包括定位药罐,定位药罐置于人体靶穴位。
11.优选的,所述万向节激光头外侧由2个球面嵌套而成,所述球面顶端与所述舵机移动端头配合连接。
12.优选的,所述热成像传感器采用amg8833模块。
13.优选的,所述机械臂外展定位摄像头采用ov2640摄像头模块。
14.本发明具有以下有益效果:
15.1、本发明具有自适性,治疗过程中,激光追踪穴位,从而保证治疗效果;
16.2、本发明可手动也可采用手机app操控,操作简单快捷;
17.3、本发明机械臂及外展臂部分采用可折叠结构提高了本发明的便携性;
18.4、本发明所采用的涡轮齿条伸缩机构的蜗杆斜齿轮传动方式带自锁功能,具有节能效果。
附图说明
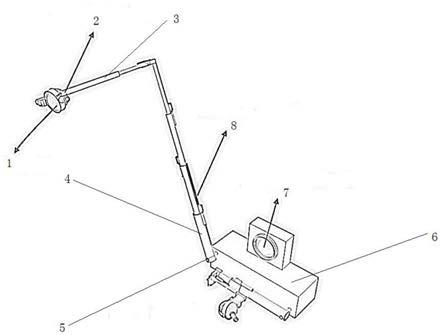
19.图1为本发明结构示意图;
20.图2为本发明使用状态示意图;
21.图3为本发明电气原理框图。
22.图中:1
‑
万向节激光头、2
‑
微调辅助摄像头、3
‑
120度旋转外展臂、4
‑
机械臂、5
‑
360度旋转机构、6
‑
机架、7
‑
机械臂外展定位摄像头、8
‑
涡轮齿条伸缩机构、9
‑
定位药罐。
具体实施方式
23.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图,对本发明进行进一步详细说明。
24.如图1、2和3所示,视觉制导激光针灸机器人,包括机架6、机械臂外展定位摄像头7、机械臂4、万向节激光头1、微调辅助摄像头2以及120度旋转外展臂3,所述机械臂4中段设有涡轮齿条伸缩机构8,机械臂4伸缩方向为机械臂4自身所在直线方向,机械臂4一端通过360度旋转机构5与机架6配合连接,机械臂4另一端与120度旋转外展臂3其中一端配合连接,所述120度旋转外展臂3另一端与万向激光头1通过万向节铰接,所述机架6呈长方体状,机械臂外展定位摄像头7设置于机架6顶面,所述微调辅助摄像头2设置于万向节激光头1侧面。
25.还包括处理器、热成像传感器、红外位移传感器、双色指示灯以及2个舵机。
26.还包括定位药罐9,定位药罐9置于人体靶穴位。
27.所述万向节激光头1外侧由2个球面嵌套而成,所述球面顶端与所述舵机移动端头配合连接。
28.所述热成像传感器采用amg8833模块。
29.所述机械臂外展定位摄像头采用ov2640摄像头模块。
30.要使激光追踪穴位,激光头必须足够灵活,而要增加激光头的灵活性,务必使其有足够灵活,传统方法是采用串联机械臂的方式来增加激光头的灵活性,但这种式会增加装置的复杂性,不利于轻量化设计。
31.采用万向关节的方式来控制激光发射方向,采用两个自由度便可以让激光朝任意方向发射,同时万向节结构紧凑,满足轻量化设计。
32.万向节激光头1采用两个自由度实现了激光任意方向的发射,激光自万向节中心发射,改变照射位置的同时也会改变照射角度,因此仅适合小范围穴位追踪。
33.为了使装置更加智能,可以通过其他位移结构来增加激光头的调整范围,以使在治疗开始时,自动对准所需治疗穴位。为使装置轻量化,增加其便携性,所用的位移结构可以折叠。工作时,定位机构伸展到合适的角度和长度,完成初始位置的定位,开始治疗后,定位机构固定,改用万向激光头来追踪移动的穴位。非工作状态下,机构可折叠,从而减小空
间占用,方便携带。
34.本装置折叠伸缩的方式采用蜗轮斜齿条来驱动,伸缩杆设计的如伸缩天线或者多级液压缸类似,大大节约空间占用的同时,蜗轮还有自锁功能,可以在治疗开始后锁定定位装置,从而达到节能和稳定的双重目的。
35.以下具体描述可采取的两种定位方法:
36.方案一:
37.采用目前较先进的自动定位方式,通过嵌入式平台驱动高清摄像头进行图像数据采集,软件上运用opencv技术分别对人体身高、体态等做图像识别,进而大致判断出具体穴位位置,然后再根据穴位上放置的药杯识别出具体位置,通过驱动舵机控制伸缩杆去到指定位置,最终实现准确定位。
38.方案二:
39.采用红外热像仪传感器做人体识别,cpu通过i2c总线读取传感器数据,然后通过智能算法对数据进行处理,进而实现整个人体特征的识别,再通过预先设计的药杯,对药杯位置进行识别,通过驱动舵机控制伸缩杆去到指定位置,最终实现准确定位
40.通过以前的实践发现,在患者进行激光穴位针灸的时候,身体总是会不自觉地前后左右移动而不自知,这种情况下很大程度上会影响治疗效果,针对此问题,我们设计了两种穴位自动追踪的方案:
41.方案一:在结构上,我们将红外位移感应器放置在激光头附近,同时在治疗的穴位上盖上一个药杯,杯盖上安装了配合红外位移感应器的电路装置,患者治疗时,一旦患者身体出现移动,身上的杯盖会随着患者一起移动,此时由于红外感应器感应到信号变化,系统会驱动万向轮使红外感应器随杯盖移动,同时带动激光针灸器一起移动,保证患者穴位一直处于照射范围中,实现稳定治疗的目的。
42.方案二:在结构上,我们将微辅摄像头放置在激光头附近,在治疗的穴位上盖上一个药杯,杯盖上设置指定颜色的形状,患者治疗时,一旦患者身体出现移动,身上的杯盖会随着患者一起移动,此时微辅摄像头就会搜寻指定颜色,系统会驱动万向轮使微辅摄像头随杯盖移动,同时带动激光针灸器一起移动,保证患者穴位一直处于照射范围中,实现稳定治疗的目的。
43.处理器选择st公司的stm32系列芯片,它是arm 32位的cortex
‑
m3内核,最大工作频率72mhz;其内部资源丰富,包含8个32位定时器,每个4个通道,最多可以实现32路pwm输出;io引脚更是达到了112个,可以更好满足需求。
44.热成像传感器采用amg8833模块,是一个8*8的红外传感器阵列,当连接到微控制器时,通过i2c总线获取一组64个单独红外温度读数,可以检测的温度范围是0℃到80℃,检测距离更是达到了7米远,检测帧频10hz,完全可以满足我们的使用要求。
45.机械臂外展定位摄像头采用ov2640摄像头模块,内置1/4寸百万高清cmos传感器,具有高灵敏度、高灵活性、支持jpeg输出等特点,并且可支持曝光、白平衡、色度、饱和度、对比度等众多参数设置,支持jpeg/rgb565格式输出,可以满足不同场合需求。
46.在使用过程中,非工作状态下,本产品可折叠。工作时,先将定位药罐置于靶穴位,机械臂外展定位摄像头或温度传感器获得药罐位置,控制机械臂调整合适的位置以使万向节激光头发射的激光能精准照射在定位药罐(穴位)上,之后360度旋转机构、蜗轮齿条伸缩
机构、120度旋转外展臂固定,当患者不自主移动时,万向节激光头在微调辅助摄像头或红外位移传感器的帮助下,追踪移动的定位药罐(穴位),从使激光稳定照射穴位,达到治疗的目的。
47.当然,本发明还可有其它多种实施例,在不背离本发明精神及其实质的情况下,熟悉本领域的技术人员可根据本发明作出各种相应的改变和变形,但这些相应的改变和变形都应属于本发明所附的权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1