一种单端口电极刺激大鼠CPG位点的双后肢步态调控系统
一种单端口电极刺激大鼠cpg位点的双后肢步态调控系统
技术领域
1.本发明涉及康复工程领域的智能控制电子系统及其控制方法,特别的采用单端口的刺激电极通过正负电压脉冲信号来实现调控大鼠后肢的交替运动。
背景技术:
2.传统的脊髓刺激器是以运动神经元为激活对象,而神经元控制的动作相对单一,所以完成一个相对复杂的协调动作,需要多个电极按一定时序进行fes才能实现。若能以神经元网络为激活对象可有效减少刺激电极数量并简化时序。在脊椎动物中,位于脊髓中的中枢模式发生器(central pattern generator, cpg)是一组神经元网络,生成有节奏的控制输出,能够将自主生成的信号与来自高级中枢的控制信号相结合产生步态运动。故采用激活cpg开展步态调控,将可以用更接近生理状况的方式和极少的电极数恢复步态运动。
3.以脊髓中的cpg作为刺激靶点,让单端口刺激电极实现双后肢运动调控的方法成为可能。
技术实现要素:
4.本发明的目的在于克服上述现有技术中的缺陷,提供一种单端口电极刺激大鼠cpg位点的双后肢步态调控系统,实现大鼠的步态训练。
5.研究发现,控制双侧下肢交替运动的cpg位点有多个,但刺激信号极性反转引起交替运动模式发生翻转的位点,每侧只有一个。其中正脉冲刺激右侧cpg位点,诱发大鼠右侧后肢伸展、左侧后肢屈曲的动作;负脉冲刺激右侧cpg位点,诱发大鼠右侧后肢屈曲、左侧后肢伸展的运动,形成完整的步态运动。以右侧的cpg作为靶点,用单个刺激电极的实现sci大鼠双侧步态运动闭环调控与康复训练。
6.为实现上述目的,本发明提供如下技术方案:单端口电极刺激大鼠cpg位点的双后肢步态调控系统,其特征在于包括:—刺激器,与上位机通讯,根据上位机的指令输出脉冲信号给生物刺激电极;采集膝关节角度采集器两个传感器的位置信息,并据此计算得到大鼠后肢的膝关节角度变化数据并发送给上位机进行保存;—生物刺激电极,采用钨丝单端电极或者表面电极,固定于脊髓表面诱发步态运动的关键位点,对该关键位点施加电激励以实现步态重建,所述脊髓表面诱发步态运动的关键位点是指位于脊髓l2节段背侧表面,对其施加电激励脉冲即能产生左右下肢中一个向前迈另一个往后蹬的动作、改变电激励脉冲的极性可使左右下肢动作方式交换反转的位点;—参考电极,置于距离所述关键位点4cm以内的肌肉或脊髓处;—膝关节角度采集器,包含两个固定于大鼠后肢的传感器,实时地采集传感器的位置信息并发送至刺激器;—阻抗测量电路,包含阻抗测量芯片,用于测量与脊髓接触时电极端口间的阻抗;
—继电器切换电路,用于将参考电极和生物刺激电极在接入阻抗测量电路和刺激电路之间进行切换,切换指令来由刺激器发出。
7.进一步的,所述继电器切换电路包括串联在回路中的继电器和三极管,三极管的基极连接刺激器的切换指令输出端,继电器具有与生物刺激电极连接的第一端口、与参考电极连接的第二端口;当继电器不得电时,第一端口与阻抗测量芯片的阻抗测量输出端连接,第二端口与阻抗测量芯片的阻抗测量输入端连接,此时通过阻抗测量芯片测量与脊髓接触时电极端口间的的阻抗,并发送给刺激器;当继电器得电时,第一端口与刺激器的脉冲信号发生端口连接,第二端口接地,此时刺激器通过刺激电极刺激大鼠cpg位点。
8.本发明还要求保护单端口电极刺激大鼠cpg位点的双后肢步态调控系统的使用方法,其特征在于包含以下步骤:步骤1、刺激器获取上位机“开始试验”的指令,通过阻抗测量电路测量电极端口间的的阻抗,并将测量结果反馈给刺激器;步骤2、刺激器判断与脊髓接触时电极端口间的阻抗是否在允许范围内,如果在允许范围内,则执行步骤3,否则向实验者发出提醒;步骤3、刺激器向继电器切换电路输出控制信号,使继电器得电动作,使得参考电极和生物刺激电极接入刺激电路,刺激器通过刺激电极刺激大鼠cpg位点。
9.进一步的,步骤3还包括刺激脉冲的闭环调控方法:根据上位机选择的大鼠膝关节角度变化的参考系,刺激器以10hz的频率采集大鼠后肢的膝关节角度,每采集一次与同一时刻的参考系角度进行对比,按照刺激器通过按键调控幅值得到膝关节角度的关系模型,刺激器自动增加或者减少脉冲的幅值以让大鼠的膝关节角度始终维持在参考系角度附近。
10.本发明系统通过正负电压脉冲刺激信号刺激特定的cpg位点,利用传感器跟踪捕获膝关节角度数据,建立信号与步态的映射关系模型,通过实时反馈给处理器的步态信息,形成闭环调控。根据映射关系模型设定训练参数对sci大鼠进行步态训练。与正常步态相比,可以在正常步态一定范围内进行调控。
附图说明
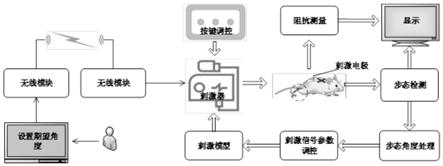
11.图1为本发明单端口电极刺激大鼠cpg位点的双后肢步态调控系统的框图。
12.图2为刺激电极、参考电极和膝关节角度采集器的安装位置示意图。
13.图3为继电器切换电路图。
14.图4为刺激脉冲的闭环调控算法流程图。
具体实施方式
15.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
16.图1为本发明实施例单端口电极刺激大鼠cpg位点的双后肢步态调控系统的框图,本系统包括:上位机、刺激器、生物刺激电极、参考电极、膝关节角度采集器、阻抗测量电路和继电器切换电路。如图2所示为刺激电极、参考电极和膝关节角度采集器的安装位置示意图。
17.其中,刺激器与上位机通讯,根据上位机的指令输出脉冲信号给生物刺激电极;采
集膝关节角度采集器两个传感器的位置信息,并据此计算得到大鼠后肢的膝关节角度变化数据并发送给上位机进行保存。脉冲信号包含交替的正电压脉冲信号串和负电压脉冲信号串,所述正电压脉冲信号串和负电压脉冲信号串中,脉冲信号的脉宽为200us,脉冲信号的间隔为30ms,脉冲信号的数量为25
‑
35个,正电压脉冲信号串起始和负电压脉冲信号串起始之间的时间间隔为步态周期的二分之一。正脉冲信号的电流幅值范围为220~500μa,负脉冲信号的电流幅值范围为
‑
500~
‑
220μa。
18.本实施例中,刺激器的核心由stm32f103组成,结合zigbee与上位机进行无线通信。stm32f103有电压输出型的dac,系统配置12位数字输入dac同时应用两个定时器,设计脉冲电压幅值的调控输出信号,经过lm358n构成电压跟随器与减法电路产生刺激cpg位点所需要的正负脉冲信号。为了得到步态角度数据与信号参数的关系模型,刺激器配备按键调控信号参数,记录角度数据。
19.cpg位点左右各一个,右侧关键位点的坐标范围为x=(0.377
±
0.196)*l1/2;y=(0.780
±
0.143)*l2,左侧关键位点坐标范围为x=(
‑
0.385
±
0.182)*l1/2;y=(
‑
0.779
±
0.147)*l2;x为脊髓腰膨大横径方向,y为脊柱的头尾方向,l1是脊髓腰膨大横径的宽度;l2是脊椎t12节段的长度,坐标原点为脊髓后正中沟与脊椎t12节段头侧横截面的交点。
20.生物刺激电极采用钨丝单端电极或者表面电极,固定于脊髓表面诱发步态运动的关键位点,对该关键位点施加电激励以实现步态运动功能重建,所述脊髓表面诱发步态运动的关键位点是指位于脊髓l2节段背侧表面,对其施加电激励脉冲即能产生左右下肢中一个向前迈另一个往后蹬的动作、改变电激励脉冲的极性可使左右下肢动作方式交换反转的位点。刺激电极在刺激cpg位点时可能会发生接触不良或发生电极氧化,系统增加了阻抗测量部分。由于阻抗测量与刺激都是针对一个关键cpg位点,系统采用钨丝电极作为阻抗测量探头与刺激电极,实现两用的功能。
21.参考电极置于距离所述关键位点4cm以内的肌肉或脊髓处。
22.膝关节角度采集器包含两个固定于大鼠后肢的jy901传感器,实时得将传感器的位置信息并发送至刺激器。用串口进行角度数据通信,jy901集成高精度的陀螺仪,能够快速解出模块当前实时运动姿态。在系统测试中,动态的环境下,测量角度误差只有0.1
°
,满足对膝关节角度的测量要求。
23.阻抗测量电路包含阻抗测量芯片,用于测量与脊髓接触时电极端口间的阻抗。本实施例中,用ad5933作为阻抗测量芯片,本系统采用两点校准方法,设置起始频率为29000hz,扫描点数16,频率增量62.5hz,每个频点重复频率测量四次,取得实部与虚部的平均值,得到相应幅度与相位,计算出此时测得的阻抗值,并在屏幕上显示。根据大鼠脊髓阻抗的范围,设定与脊髓接触时电极端口间的标定电阻为1kω。
24.继电器切换电路,用于将参考电极和生物刺激电极在接入阻抗测量电路和刺激电路之间进行切换,切换指令由刺激器发出。在设计电路中用继电器进行阻抗测量电路与刺激电路的通断,物理通断的主要目的是防止刺激电路对阻抗测量的影响。如图3所示,继电器切换电路包括串联在回路中的继电器jk和三极管q1,三极管q1的基极连接刺激器的切换指令输出端,继电器jl具有与生物刺激电极连接的端口1、与参考电极连接的端口2;当继电器不得电时,端口1与阻抗测量芯片的阻抗测量输出端连接,端口2与阻抗测量芯片的阻抗测量输入端连接,此时通过阻抗测量芯片测量与脊髓接触时电极端口间的阻抗,并发送给
刺激器;当继电器jk得电时,端口1与刺激器的脉冲信号发生端口连接,端口2接地,此时刺激器通过刺激电极刺激大鼠cpg位点。jk1和jk2为继电器jk的两个触点;in连接阻抗测量芯片的输入端,fes连接刺激器的信号产生端,out连接阻抗测量芯片的输出端;pa4连接刺激器对电路切换的控制端;led为发光二极管,给出电路接通的指示信号;r1、r2、r3为限流电阻,d1为二极管,防止逆向电流。
25.本实施例单端口电极刺激大鼠cpg位点的双后肢步态调控系统的使用方法,包含以下步骤:步骤1、刺激器获取上位机“开始试验”的指令,通过阻抗测量电路测量与脊髓接触时电极端口间的阻抗,并将测量结果反馈给刺激器;步骤2、刺激器判断与脊髓接触时电极端口间的阻抗是否在允许范围内,如果在允许范围内,则执行步骤3,否则向实验者发出提醒;步骤3、刺激器向继电器切换电路输出控制信号,使继电器得电动作,使得参考电极和生物刺激电极接入刺激电路,刺激器通过刺激电极刺激大鼠cpg位点。
26.系统工作过程中,主要分为两个过程:第一,确认阻抗在设定阈值之内,系统亮绿灯并根据预先设置的步幅、步频选择初始刺激信号;第二,通过检测的步态角度信息根据信号与角度的映射关系模型实时调控信号的参数,自动调节大鼠后肢运动。第一个过程阻抗不在设定的范围之内,系统亮红灯并提示用户检查问题;第二个过程刺激信号刺激后,自动调节后肢无法达到参考系的合理范围,系统停止刺激,并提示大鼠可能产生肌肉疲劳。
27.模型建立:用电压的刺激方式作用在大鼠的cpg位点上,依据按键控制脉冲幅值变化反馈得到的膝关节角度数据来建立模型。刺激sci大鼠cpg位点的实验中得到以0.161v为步长改变刺激信号幅值能够更加平稳精准调控后肢运动。刺激信号幅值太低无法诱发动作,幅值太高则达不到该有的调控精度。在实验中得到以1.289v~2.255v的电压幅值之间进行调控能够清晰看出大鼠后肢步态变化,利于系统的闭环调控。
28.为了得到信号幅值参数与角度的关系采用分离变量法,确定正负脉冲对sci大鼠膝关节角度的影响,不同电压幅值与膝关节的角度映射如图3,图4,分别为三只大鼠的膝关节运动角度均值曲线。在麻醉sci大鼠cpg不受刺激的情况下,不同大鼠的膝关节角度一般稳定在118
°
~122
°
。图3,正脉冲幅值保持1.289v不变,负电压在可调区间从
‑
1.289v到
‑
2.255增加。图4, 负脉冲幅值保持负2.255v不变,正电压在可调区间从+1.289到+2.255增加。实验分析得到正负脉冲幅值对角度变化有不同的影响,以θ1表示大鼠右侧后肢向后运动膝关节角度,θ2表示大鼠右侧后肢向前运动的膝关节角度,得到脉冲幅值与膝关节角度的关系模型:正脉冲信号刺激,大鼠右侧后肢向后运动,膝关节θ1变化幅度约1
°
;负脉冲信号刺激,大鼠右侧后肢向前运动,膝关节的θ2变化幅度约为2
°
;不产生刺激信号后,大鼠膝关节角度渐渐恢复平稳状态。实验结果表明负脉冲对cpg位点的刺激效果更加明显,且对cpg进行刺激,大鼠膝关节角度范围保持在96
°
~128
°
之间。
29.后肢调控:步态的闭环控制主要调控步频与步幅,在调控过程中分为角度数据处理与幅值dac调控。系统每秒采集的大鼠膝关节角度信息λ1与预先设置的参考系角度λ2进行比对,s代表dac参数调控的最小步长。刺激时,对应正脉冲刺激后肢角度变化为θ1,负脉冲刺激后肢
变化角度θ2。在步幅调控中,步幅与脉冲幅值相关,正脉冲刺激时,n=|λ1‑
λ2|/θ
1,
负脉冲刺激时,n=|λ1‑
λ2|/θ2;在步频调控中,步频与正负脉冲间隔期间相关,此时刺激信号幅值趋于0,λ1与λ2接近,n近似于0(n为调整参数s的次数,取四舍五入整数值)。在实验中得到此系统中,s=0.161v, θ1=1
°
,θ2=2
°
。闭环调控过程如图4所示。
30.正脉冲刺激的过程中,假设在t1时刻的采集角度为λ1,在对应t1的参考系角度为λ2=f(t1),λ2>λ1,则增长步长个数为n=(λ2‑
λ1)/1,λ2<λ1则减少的步长个数为n=(λ1‑
λ2)/1;在负脉冲刺激的过程中,假设在t2时刻的采集角度为λ1’
,对应t2参考系角度坐标为λ2’
=f(t2), λ2’
>λ1’
则增长步长个数为n=(λ2’‑
λ1’
)/2,λ2’
<λ1’
则减少的步长个数为n=(λ1’‑
λ2)/2。(t为参考系角度采样间隔时间) 。
31.本发明不局限于上述实施例所述的具体技术方案,凡采用等同替换形成的技术方案均为本发明要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1