一种可矫正姿势的腿部柔韧度训练器的制作方法
1.本发明涉及一种腿部柔韧度训练器,尤其涉及一种可矫正姿势的腿部柔韧度训练器。
背景技术:
2.柔韧性是学习武术搏击、舞蹈、瑜伽等运动的基本功,训练柔韧性的目的是为了提高肌肉、肌腱、韧带等组织的伸展性,增加躯干与四肢的活动范围,只有练习方法正确,才能增加各个关节的灵活性和活动范围,使肌肉弹性增强,特别是在发展某一部位柔韧性时,应让屈肌、伸肌协调发展,才能有效提高柔韧性。
3.目前关于柔韧训练的器械很少见到,市场上出现的腿部柔韧性训练器结构也较为单一,练习者进行腿部横叉柔韧训练时,需要练习者手动拉动训练器,由于练习者坐在地面上,需要使用较大的拉力控制腿部向前滑动的动力,因此练习者上身难以保持直立,脚尖无固定容易弯曲,容易导致训练效果不佳。
技术实现要素:
4.本发明的目的是提供一种能够对练习者腿部进行充分拉伸、能够将练习者肩部固定以防止身体前倾、能够充分地对练习者手腕进行活动的可矫正姿势的腿部柔韧度训练器,以解决上述背景技术中提出市场上出现的腿部柔韧性训练器结构较为单一、练习者上身难以保持直立、脚尖无固定容易弯曲的问题。
5.一种可矫正姿势的腿部柔韧度训练器,包括有固定板、打开机构和阻挡机构,固定板上设置有打开机构,阻挡机构对称设置在固定板上。
6.进一步的是,打开机构包括有固定座、第一转动架、第一滑动架、第一复位弹簧、电动推杆、滑杆、第一固定架、第二复位弹簧和第二固定架,固定板上固定安装有固定座,固定座上交错式转动连接有两第一转动架,固定板上以可升降的方式连接有两第一滑动架,第一滑动架上联接有一对第一复位弹簧,第一复位弹簧一端与固定板相连,两第一滑动架上共同固定安装有电动推杆,滑杆滑动式连接在固定板上,滑杆一端焊接有第一固定架,第一固定架与第一转动架限位配合,第一固定架与电动推杆伸缩轴一端相互接触,第一固定架上固定连接有第二复位弹簧,第二复位弹簧一端与固定板联接,电动推杆伸缩轴上焊接有第二固定架,第二固定架与第一固定架相互接触。
7.进一步的是,阻挡机构包括有第一楔形架、第一固定杆、第二滑动架和第三复位弹簧,第一楔形架对称设置在固定板上,固定板上对称联接有第一固定杆,第二滑动架以可升降的方式连接在第一固定杆上,第二滑动架底面联接有第三复位弹簧,第三复位弹簧一端与固定板固定连接。
8.进一步的是,还包括有升降机构,升降机构设置在打开机构上,升降机构包括有齿形架、第二固定杆、螺杆、螺母、滑动座和第一齿轮,第二固定架上对称焊接有齿形架,第一转动架上焊接有第二固定杆,第一转动架上的轴承通过过渡配合的方式连接有螺杆,螺杆
上通过螺纹连接的方式连接有螺母,螺母上焊接有滑动座,滑动座与第二固定杆以可升降的方式连接,螺杆底端焊接有第一齿轮。
9.进一步的是,还包括有矫正肩部机构,矫正肩部机构对称设置在固定板上,矫正肩部机构包括有第三固定架、第三滑动架、第四复位弹簧、第二楔形架、第四滑动架和第五复位弹簧,第三固定架对称固定安装在固定板上,第三固定架上方滑动式连接有第三滑动架,第三滑动架与第三固定架之间连接有第四复位弹簧,第三滑动架上固定连接有第二楔形架,第三滑动架上滑动式连接有第四滑动架,第四滑动架上联接有第五复位弹簧,第五复位弹簧一端与第三滑动架固定连接。
10.进一步的是,还包括有手腕活动机构,手腕活动机构设置在打开机构上,手腕活动机构包括有第四固定架、缺齿条、伸缩带、第二转动架、手握杆、第二齿轮和扭力弹簧,第一固定架上焊接有第四固定架,第四固定架上固定连接有两缺齿条,固定座上对称设置有伸缩带,固定座上对称转动式连接有第二转动架,第二转动架上焊接有手握杆,第二转动架上焊接有第二齿轮,第二齿轮一侧联接有扭力弹簧,扭力弹簧一端与固定座固接。
11.与现有技术相比,本发明具有以下优点:通过第一齿轮会与齿形架相互啮合,第二固定架带动齿形架朝远离第一滑动架方向运动,齿形架带动第一齿轮及其上装置转动,通过第二固定杆的作用,螺杆带动螺母及滑动座向上运动,滑动座将脚部向上抬起,对练习者腿部进行充分拉伸。
12.通过滑动座推动第二楔形架及其上装置朝远离第一滑动架方向运动,第四滑动架将人体肩部挡住固定,防止练习者身体前倾。
13.通过缺齿条的作用,使得第二齿轮及第二转动架上下往复摆动,第二转动架通过手握杆带动手腕上下往复摆动,充分地对练习者手腕进行活动。
附图说明
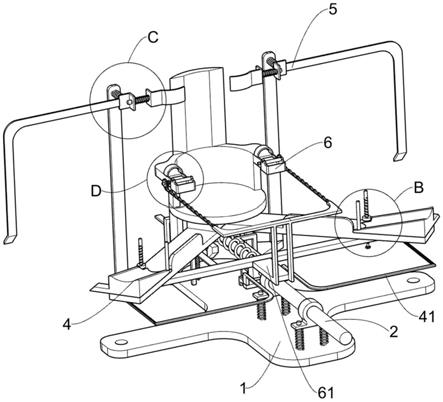
14.图1为本发明的第一种立体结构示意图。
15.图2为本发明的第二种立体结构示意图。
16.图3为本发明打开机构的立体结构示意图。
17.图4为本发明阻挡机构的部分立体结构示意图。
18.图5为本发明a的立体结构示意图。
19.图6为本发明b的立体结构示意图。
20.图7为本发明c的立体结构示意图。
21.图8为本发明d的立体结构示意图。
22.以上附图中:1、固定板,2、打开机构,21、固定座,22、第一转动架,23、第一滑动架,24、第一复位弹簧,25、电动推杆,26、滑杆,27、第一固定架,28、第二复位弹簧,29、第二固定架,3、阻挡机构,31、第一楔形架,32、第一固定杆,33、第二滑动架,34、第三复位弹簧,4、升降机构,41、齿形架,42、第二固定杆,43、螺杆,44、螺母,45、滑动座,46、第一齿轮,5、矫正肩部机构,51、第三固定架,52、第三滑动架,53、第四复位弹簧,54、第二楔形架,55、第四滑动架,56、第五复位弹簧,6、手腕活动机构,61、第四固定架,62、缺齿条,63、伸缩带,64、第二转动架,65、手握杆,66、第二齿轮,67、扭力弹簧。
具体实施方式
23.为使本发明的目的、技术方案和优点更加清楚明了,下面结合具体实施方式并参照附图,对本发明进一步详细说明。应该理解,这些描述只是示例性的,而并非要限制本发明的范围。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本发明的概念。
24.实施例1
25.一种可矫正姿势的腿部柔韧度训练器,如图1-5所示,包括有固定板1、打开机构2和阻挡机构3,固定板1上设置有打开机构2,打开机构2用于对腿部进行拉伸,阻挡机构3对称设置在固定板1上。
26.打开机构2包括有固定座21、第一转动架22、第一滑动架23、第一复位弹簧24、电动推杆25、滑杆26、第一固定架27、第二复位弹簧28和第二固定架29,固定板1上固定安装有固定座21,固定座21上交错式转动连接有两第一转动架22,第一转动架22用于对腿部进行拉伸,固定板1上以可升降的方式连接有两第一滑动架23,第一滑动架23上联接有一对第一复位弹簧24,远离第一滑动架23的第一复位弹簧24一端与固定板1相连,两第一滑动架23上共同固定安装有电动推杆25,滑杆26滑动式连接在固定板1上,滑杆26一端焊接有第一固定架27,第一固定架27与第一转动架22限位配合,第一固定架27用于推动两第一转动架22相对摆动,第一固定架27与电动推杆25伸缩轴一端相互接触,第一固定架27上固定连接有第二复位弹簧28,远离第一固定架27的第二复位弹簧28一端与固定板1联接,电动推杆25伸缩轴上焊接有第二固定架29,第二固定架29与第一固定架27相互接触。
27.阻挡机构3包括有第一楔形架31、第一固定杆32、第二滑动架33和第三复位弹簧34,第一楔形架31对称设置在固定板1上,第一楔形架31用于推动第二固定架29及其上装置向下运动,固定板1上对称联接有第一固定杆32,第二滑动架33以可升降的方式连接在远离固定板1的第一固定杆32上,第二滑动架33用于将第一固定架27挡住,第二滑动架33底面联接有第三复位弹簧34,远离第二滑动架33的第三复位弹簧34一端与固定板1固定连接。
28.当练习者需要对腿部进行柔韧度训练时,练习者坐在固定座21上,将双腿放置在两第一转动架22上,然后练习者手动控制电动推杆25伸长,电动推杆25伸缩轴推动第一固定架27朝远离第一滑动架23方向运动,第二复位弹簧28被压缩,第一固定架27推动两第一转动架22相对摆动,两第一转动架22相对摆动对腿部进行拉伸,对腿部进行柔韧度训练。同时,电动推杆25伸长带动第二固定架29朝远离第一滑动架23方向运动,第二固定架29与第一楔形架31相互接触,第一楔形架31推动第二固定架29及其上装置向下运动,第一复位弹簧24被压缩,电动推杆25伸缩轴与第一固定架27分离,同时第二固定架29会推动第二滑动架33向下运动,第二滑动架33将第一固定架27挡住,防止被压缩的第二复位弹簧28复位带动第一固定架27朝靠近第一滑动架23方向运动。
29.当训练完毕后,练习者手动控制电动推杆25收缩,电动推杆25收缩带动第二固定架29朝靠近第一滑动架23方向运动,第二固定架29与第一楔形架31分离,被压缩的第一复位弹簧24带动第一滑动架23及其上装置向上运动复位,第二固定架29与第二滑动架33分离,被压缩的第三复位弹簧34复位带动第二滑动架33向上运动,第二滑动架33不再将第一固定架27挡住,被压缩的第二复位弹簧28复位带动第一固定架27及其上装置朝靠近第一滑动架23方向运动,第一固定架27带动两第一转动架22及其上装相向摆动复位,设备各个零
部件均复位后,练习者从此设备上下来。
30.实施例2
31.在实施例1的基础之上,如图6所示,还包括有升降机构4,升降机构4设置在打开机构2上,升降机构4用于对练习者腿部进行充分拉伸,升降机构4包括有齿形架41、第二固定杆42、螺杆43、螺母44、滑动座45和第一齿轮46,第二固定架29上对称焊接有齿形架41,第一转动架22上焊接有第二固定杆42,第一转动架22上的轴承通过过渡配合的方式连接有螺杆43,螺杆43上通过螺纹连接的方式连接有螺母44,螺母44上焊接有滑动座45,滑动座45用于将脚部向上抬起,滑动座45与第二固定杆42以可升降的方式连接,螺杆43底端焊接有第一齿轮46。
32.第二固定架29及其上装置向下运动时,第二固定架29会带动齿形架41向下运动,第一转动架22相对运动会带动螺杆43及其上装置相对运动,最终第一齿轮46会与齿形架41相互啮合,第二固定架29带动齿形架41朝远离第一滑动架23方向运动,齿形架41带动第一齿轮46及其上装置转动,通过第二固定杆42的作用,螺杆43带动螺母44及滑动座45向上运动,滑动座45将脚部向上抬起,对练习者腿部进行充分拉伸。
33.实施例3
34.在实施例2的基础之上,如图7所示,还包括有矫正肩部机构5,矫正肩部机构5对称设置在固定板1上,矫正肩部机构5用于将人体肩部挡住,矫正肩部机构5包括有第三固定架51、第三滑动架52、第四复位弹簧53、第二楔形架54、第四滑动架55和第五复位弹簧56,第三固定架51对称固定安装在固定板1上,第三固定架51上方滑动式连接有第三滑动架52,第三滑动架52与第三固定架51之间连接有第四复位弹簧53,第三滑动架52上固定连接有第二楔形架54,第三滑动架52上滑动式连接有第四滑动架55,第四滑动架55用于将练习者肩部固定,第四滑动架55上联接有第五复位弹簧56,远离第四滑动架55的第五复位弹簧56一端与第三滑动架52固定连接。
35.当练习者坐在固定座21上时,第四滑动架55将练习者肩部固定,第一转动架22及其上装置相对摆动时,滑动座45会与第二楔形架54相互接触,滑动座45推动第二楔形架54及其上装置朝远离第一滑动架23方向运动,第四滑动架55将人体肩部挡住,防止练习者身体前倾。
36.实施例4
37.在实施例3的基础之上,如图8所示,还包括有手腕活动机构6,手腕活动机构6设置在打开机构2上,手腕活动机构6用于对手腕进行活动,手腕活动机构6包括有第四固定架61、缺齿条62、伸缩带63、第二转动架64、手握杆65、第二齿轮66和扭力弹簧67,第一固定架27上焊接有第四固定架61,第四固定架61上固定连接有两缺齿条62,固定座21上对称设置有用于固定手腕的伸缩带63,固定座21上对称转动式连接有第二转动架64,第二转动架64上焊接有手握杆65,第二转动架64上焊接有第二齿轮66,第二齿轮66一侧联接有扭力弹簧67,远离第二齿轮66的扭力弹簧67一端与固定座21固接。
38.练习者将手臂放置在伸缩带63内,手动握住手握杆65,第一固定架27朝远离第一滑动架23方向运动时,第一固定架27带动第四固定架61及其上装置朝远离第一滑动架23方向运动,缺齿条62带动第二齿轮66转动,使得第二转动架64向下摆动,第二转动架64通过手握杆65带动手腕摆动,当缺齿条62与第二齿轮66分离时,被压缩的扭力弹簧67复位带动第
二转动架64及其上装置转动复位,通过缺齿条62的作用,使得第二转动架64及其上装置上下往复摆动,充分地对练习者手腕进行活动。
39.最后所应当说明的是,以上实施例仅用以说明本发明的技术方案而非对本发明保护范围的限制,尽管参照较佳实施例对本发明作了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的实质和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1