一种制动装置、轮体组件以及助行器的制作方法
1.本技术涉及医疗器械技术领域,特别涉及一种制动装置、轮体组件以及助行器。
背景技术:
2.助行器等辅助行走设备能够协助下肢病变患者或者老年人等行动不便的人群走动。例如,助行器可以为支撑架,用户可通过双手搀扶支撑架,行走时提起支撑架挪动,以达到移动身体的目的。
3.本技术的申请人在长期的研发中发现,用户在行走过程中需不断提起支撑架,负担较大,移动速度慢,使用不便利。目前通过在支撑架底部设置轮子以增加其灵活性,但是移动过程中提供给用户的支撑力及速度都不可控,容易导致用户摔倒,安全性较差。若通过刹车装置进行制动,则对用户的操作要求较高,并且刹车急停也存在危险。
技术实现要素:
4.本技术提供一种制动装置、轮体组件以及助行器,以解决现有技术在助行器等设备上设置轮子导致安全性较差的技术问题。
5.为解决上述技术问题,本技术采用的一个技术方案是提供一种制动装置,包括:
6.轴体;
7.壳体,套设于所述轴体外,且与所述轴体同轴设置,所述壳体能够相对所述轴体转动;
8.磁感机构,设置于所述壳体内,用于在所述壳体相对所述轴体转动时通过磁场反应对所述壳体产生与所述壳体的转动方向相反的阻力,或对所述轴体产生与所述轴体的转动方向相反的阻力;
9.调节机构,与所述磁感机构连接,用于调节所述阻力的大小。
10.为解决上述技术问题,本技术采用的另一个技术方案是提供一种轮体组件,包括:
11.如上述的制动装置,其中,所述壳体呈圆环形设置,用于作为轮体;或者
12.如上述的制动装置和轮体,所述轮体与所述壳体或所述轴体连接。
13.为解决上述技术问题,本技术采用的另一个技术方案是提供一种助行器,包括主体架及如上述的轮体组件,所述轮体组件转动连接于所述主体架的底部。
14.本技术制动装置包括轴体、壳体、磁感机构以及调节机构,壳体套设于轴体外,且与轴体同轴设置,壳体能够相对轴体转动,磁感机构设置于壳体内,用于在壳体相对轴体转动时通过磁场反应对壳体产生与壳体的转动方向相反的阻力,或对轴体产生与轴体的转动方向相反的阻力,调节机构与磁感机构连接,用于调节阻力的大小,通过设置磁感机构产生阻力,能够对与制动装置一体或者连接的轮体起到制动作用,并且由于其制动力与壳体或轴体的转动有关,而非摩擦制动,因为不会产生急停效果,安全性更高,也能够减小磨损,提高制动装置的使用寿命,同时制动装置的结构简单,易于制备,通过设置调节机构对阻力进行自动调节,能够使得制动装置的适用范围更广,并且更加智能化。
附图说明
15.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图,其中:
16.图1至图5是本技术制动装置第一实施例的结构示意图;
17.图6至图14是本技术制动装置第二实施例的结构示意图;
18.图15至图21是本技术制动装置第三实施例的结构示意图;
19.图22至图26是本技术制动装置第四实施例的结构示意图;
20.图27至图30是本技术制动装置第五实施例的结构示意图;
21.图31至图34是本技术制动装置第六实施例的结构示意图;
22.图35至图37是本技术制动装置第七实施例的结构示意图;
23.图38至图39是本技术制动装置第八实施例的结构示意图;
24.图40至图42是本技术制动装置第九实施例的结构示意图;
25.图43至图46是本技术制动装置第十实施例的结构示意图;
26.图47是本技术制动装置第十一实施例的结构示意图;
27.图48至图49是本技术制动装置第十二实施例的结构示意图;
28.图50是本技术轮体组件第二实施例的结构示意图;
29.图51是本技术助行器第一实施例的结构示意图;
30.图52是本技术助行器第二实施例的结构示意图。
具体实施方式
31.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,均属于本技术保护的范围。
32.本技术中的术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。本技术的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。此外,术语“包括”和“具有”以及它们任何变形,意图在于覆盖不排他的包含。例如包含了一系列步骤或单元的过程、方法、系统、产品或设备没有限定于已列出的步骤或单元,而是可选地还包括没有列出的步骤或单元,或可选地还包括对于这些过程、方法、产品或设备固有的其它步骤或单元。而术语“和/或”,仅仅是一种描述关联对象的关联关系,表示可以存在三种关系,例如,a和/或b,可以表示:单独存在a,同时存在a和b,单独存在b这三种情况。另外,本文中字符“/”,一般表示前后关联对象是一种“或”的关系。
33.参见图1至图4,本技术制动装置10第一实施例包括轴体100、壳体200、磁感件310以及磁体组件320,壳体200套设于轴体100外,且与轴体100同轴设置,壳体200能够相对所轴体100转动,磁感件310上绕设有线圈311,磁体组件320包括多个沿轴体100的周向间隔设置的磁体,其中,磁感件310和磁体组件320中的一者与轴体100连接,另一者与壳体200连
接,以使得壳体200相对轴体100转动时,线圈311能够切割磁体组件320形成的磁场,从而产生与壳体200或轴体100的转动方向相反的阻力,能够对制动装置10起到制动作用,并且由于其制动力与壳体200或轴体100的转动有关,而非摩擦制动,因此不会产生急停效果,安全性更高,也能够减小磨损,提高制动装置10的使用寿命,同时其结构简单,易于制备。
34.在本实施例中,制动装置10还可以包括轮胎400,轮胎400套设于壳体200外,能够起到减震的作用。
35.具体的,一并参见图5,磁体可以包括第一磁体321及第二磁体322,本实施例中以第一磁体321和第二磁体322为例进行说明。磁体组件320以速度v向图5中的逆时针方向转动,磁感件310固定不动,第一磁体321和第二磁体322产生的磁场强度分别为b1和b2,第一磁体321朝向磁感件310的磁极为北极,第二磁体322朝向磁感件310的磁极为南极,线圈311切割磁感线的部分为c侧部分和d侧部分,线圈311在切割磁感线的方向(即轴体100的周向)上的投影长度(即c侧部分或d侧部分沿轴体100的轴向上的长度)为l,c侧部分产生的感应电流的方向为图5所示向前的方向,d侧部分产生的感应电流的方向为图5所示向后的方向,则c侧部分产生的安培力f
c
=nb1lv,d侧部分产生的安培力f
d
=nb2lv,其中n为线圈311的匝数,由于两者的安培力的方向都为顺时针方向,则两者的合力f
合
=nb1lv+nb2lv,由于第一磁体321和第二磁体322产生的磁场强度相等,即b1=b2=b,则f
合
=2*nblv。
36.在本实施例中,阻力与壳体200或轴体100的转动速度呈正向关系,由f
合
=2*nblv也可得出,即壳体200的转动速度越大,线圈311切割磁体组件320形成的磁场所产生的与壳体200的转动方向相反的阻力越大,在制动装置10的转动速度不变的情况下,可提供不变的制动力,稳定性较好;而当制动装置10的转动速度变快的情况下,能够提供较大的制动力,从而防止制动装置10运动速度过快,提高安全性。
37.在本实施例中,磁体的数量为双数,多个磁体相对轴体100的轴心对称设置,能够使得磁体组件320形成的磁场分布更加均匀,进而使得线圈311切割磁体组件320形成的磁场所产生的阻力更加稳定。
38.在本实施例中,相对轴心100对称的两个磁体的磁极呈同向设置,相邻两个磁体的磁极呈反向设置,其中,定义磁体的磁极的安装方向为朝向轴体100的轴心和背向轴体100的轴心,两个磁体的磁极同向即两个磁体的磁极都朝向或者背向轴体100的轴心,两个磁体的磁极反向即两个磁体中的一者的磁极朝向轴体100的轴心,而另一者的磁极背向轴体100的轴心,通过上述磁体的设置方式,能够使得磁体组件320形成的磁场分布更加均匀,进而使得线圈311切割磁体组件320形成的磁场所产生的阻力更加稳定。
39.在本实施例中,磁感件310包括主体部312及沿主体部312的外周间隔设置的多个安装部313,线圈311绕设于安装部313上,能够使得线圈311与磁感件310的相对位置更加稳固。
40.在本实施例中,安装部313可以呈工字型设置,能够便于线圈311缠绕并且能够对线圈311进行限位,防止线圈311向远离轴体100的方向从安装部313脱落,使得线圈311与磁感件310的整体结构更加稳固。
41.在其他实施例中,安装部313也可以呈直线型设置,以实现线圈311的绕设,在此不做限制。
42.在本实施例中,安装部313上的线圈311沿轴体100的周向上的最大宽度等于磁体
沿轴体100的周向上的宽度,安装部313上的线圈311沿轴体100的轴向上的最大长度大于或等于磁体沿轴体100的轴向上的长度,以使得线圈311能够在相对磁体运动的过程中持续切割磁体组件320形成的磁场,从而持续产生阻力,使得阻力的稳定性更好。
43.在其他实施例中,安装部313上的线圈311沿轴体100的周向上的最大宽度还可以大于磁体沿轴体100的周向上的宽度,在此不做限制。
44.在本实施例中,安装部313上的线圈311沿轴体100的周向上的最大宽度与磁体沿轴体100的周向上的宽度的差值为a,磁体沿轴体100的周向上的宽度为b,其中,a与b的比值小于或等于10%,例如10%、8%或5%。当a为0时,线圈311能够在相对磁体运动的过程中持续切割磁体组件320形成的磁场;当a大于0时,线圈311的两侧在某一时间段内会同时处于相同磁极对应的区域,线圈311上产生的电流为0,阻力间断。
45.在本实施例中,磁体的数量大于安装部313的数量,且磁体的数量与安装部313的数量的差值为正整数,能够使得磁体产生的磁场对线圈311的作用持续不间断,从而持续产生阻力,使得阻力的稳定性更好。
46.在本实施例中,多个安装部313上的全部线圈311共同形成一闭合回路。具体的,可以为全部线圈311短接,不接其他器件。在其他实施例中,也可以外接开关、电阻等器件,但本实施例中的闭合回路中不包括驱动等器件,即本实施例中线圈311产生的电流仅用于产生安培力或主要用于产生安培力。
47.在其他实施例中,也可以为多个安装部313中每个安装部313上的线圈311形成一闭合回路,或者多个安装部313中每至少两个安装部313上的线圈311共同形成一闭合回路,在此不做限制。
48.在本实施例中,壳体200形成有一容置空间,容置空间在壳体200的一侧形成有开口(图中未标出),磁感件310和磁体组件320设置于容置空间内,制动装置10进一步包括盖板510,盖板510盖设于开口上,能够起到对磁感件310和磁体组件320等部件的保护作用,且使得制动装置10的外观更加规整。
49.在本实施例中,盖板510与轴体100之间、盖板510与壳体200之间分别可以通过螺钉固定连接。在其他实施例中,盖板510与壳体200之间也可以通过卡扣、焊接或者粘贴等方式连接,在此不做限制。
50.在本实施例中,制动装置10进一步可以包括第一轴承520和第二轴承530,第一轴承520设置于轴体100与壳体200之间,第二轴承530设置于轴体100与盖板510之间,通过设置第一轴承520和第二轴承530能够减少轴体100与壳体200之间、轴体100与盖板510之间的摩擦力,还能够起到对轴体100的支撑作用,延长轴体100、壳体200以及盖板510的使用寿命。
51.参见图1、图6和图7,本技术制动装置10第二实施例包括轴体100、壳体200、磁感机构300以及调节机构610,磁感机构300设置于壳体200内,用于在壳体200转动时通过磁场反应对壳体200产生与壳体的转动方向相反的阻力,或对轴体100产生与轴体100的转动方向相反的阻力,调节机构610与磁感机构300连接,用于调节阻力的大小,其中,磁感机构300包括磁感件310和磁体组件320,轴体100、壳体200、磁感件310以及磁体组件320的结构参见上述制动装置10第一实施例,在此不再赘述,通过设置调节机构610对阻力进行自动调节,能够使得制动装置10的适用范围更广,并且更加智能化。
52.一并参见图8至图12,在本实施例中,调节机构610包括调节件611及至少一个电阻612,调节件611与磁感机构300电连接,且设置有第一连接部6111,至少一个电阻612的两端分别设置有至少两个第二连接部6121,调节件611能够相对电阻612运动,以使得第一连接部6111能够与至少两个第二连接部6121中的一个电连接,进而为磁感机构300接入不同阻值的负载,实现阻力的调节。
53.在本实施例中,制动装置10进一步可以包括第一支撑管613,至少一个电阻612设置于第一支撑管613上,调节件611呈环状设置,能够相对第一支撑管613转动,第一连接部6111为形成于调节件611外周的凹槽,调节件611的外周表面除凹槽处都为绝缘设置,凹槽处为导电设置,第二连接部6121包括抵接件6122及第一弹性件6123,抵接件6122与电阻612电连接,第一弹性件6123用于向抵接件6122提供弹力以使得抵接件6122与调节件611的外周抵接,使得第一连接部6111转动至与第二连接部6121相对时,抵接件6122能够与第一连接部6111抵接,进而使得抵接件6122能够实现与第一连接部6111的电连接。
54.在本实施例中,调节件611的外周形成有环形槽6112,第一连接部6111相对环形槽6112内陷,抵接件6122的端部呈弧形凸起设置,以使得抵接件6122的至少部分嵌入环形槽6112内,能够实现对抵接件6122沿第一支撑管613的轴向上的限位,避免抵接件6122脱离调节件611,提高制动装置10的可靠性。
55.在本实施例中,制动装置10进一步可以包括第二支撑管614及与第二支撑管614连接的旋钮615,第二支撑管614与第一支撑管613嵌套设置,调节件611设置于第二支撑管614上,以使得调节件611能够随旋钮615转动,以使得旋钮615能够受力转动,进而带动调节件611转动以实现调节,通过设置旋钮615实现调节机构610的调节,能够使得调节操作更加方便,且旋钮615的占用空间较小,使得调节机构610的整体结构更加紧凑。
56.一并参见图13,在本实施例中,制动装置10进一步可以包括外壳616,调节件611及电阻612设置于外壳616内,外壳616远离旋钮165的一端形成有开口6161,开口6161呈多边形设置,第二支撑管614远离旋钮615的一端设置有限位件6141及第二弹性件6142,第二弹性件6142用于向限位件6141提供弹力以使得第二支撑管614转动的过程中限位件6141能够与外壳616抵接。
57.具体的,在本实施例中,在开口6161包括多个沿第一支撑管613的周向间隔设置的容置口6162,当限位件6141转动至容置口6162时,第二弹性件6142的压缩距离为0,以使得限位件6141与外壳616间隔,或者限位件6141与外壳616抵接但作用于外壳616的作用力为0,此时第一连接部6111与其中一个第二连接部6121抵接;当限位件6141转动至两个容置口6162之间时,限位件6141与外壳616抵接但作用于外壳616的作用力大于0,此时第一连接部6111不与一个第二连接部6121抵接,以使得旋钮615在被转动的过程中,用户能够感知旋钮615是否转动至预定档位。
58.在其他实施例中,调节件611也可以为呈直线形或弧形设置的滑道,调节件611可以相对电阻612滑动,以使得第二连接部6121能够与第一连接部6111电连接。
59.在本实施例中,电阻612的数量为多个,多个电阻612组成多个电阻组,每组电阻组包括至少一个电阻612,多个电阻组沿第一支撑管613的轴向间隔设置,调节件611的数量为多个,且与电阻组的组数相同,多个调节件611沿第一支撑管613的轴向间隔设置,且与电阻组分别一一对应,能够为磁感机构300接入更多不同阻值的负载,进而使得阻力的调节更加
灵活、范围更广、适应性更好。
60.一并参见图14,例如在本实施例中,电阻组的数量为三,用于分别与磁感机构300的三根导线连接,每组电阻组包括四个电阻612,四个电阻612位于同一个与第一支撑管613的轴向垂直的平面上,每组电阻组中的四个电阻612串联,三组电阻组的一端相互连接,每个电阻612之间及电阻组的另一端分别设置有第二连接部6121,对应多个档位,例如一档可接入三个电阻612,二档可接入六个电阻612等。
61.在其他实施例中,磁感机构300也可以直接引出两根导线以与调节机构610连接,或者磁感机构300也可以引出两根或三根导线,经整流机构(图中未示出)后通过两根导线与调节机构610连接,在此不做限制。
62.参见图1、图15至图17,本技术制动装置10第三实施例包括轴体100、壳体200、磁感机构300以及调节机构620,轴体100、壳体200以及磁感机构300的结构参见上述制动装置10第二实施例,在此不再赘述,调节机构620与磁感机构300连接,用于调节阻力的大小。
63.在本实施例中,调节机构620包括调节件及至少一个电阻622,调节件包括至少一个按键621,按键621设置有导接部6211,制动装置10进一步包括间隔设置的第一连接部6221和第二连接部6222,第一连接部6221经电阻622与磁感机构300的一端电连接,第二连接部6222与磁感机构300的另一端电连接,按键621能够被按下,以使得导接部6211将第一连接部6221和第二连接部6222导通,进而能够将对应的电阻622作为负载与磁感机构300连接,实现阻力的改变,通过设置按键621实现调节机构620的调节,能够使得调节的触感更加明显,档位调节更加可靠。
64.在其他实施例中,还可以为电阻622的一端经第一连接部6221与磁感机构300的一端连接,电阻622的另一端经第二连接部6222与磁感机构300的另一端连接,按键621能够被按下,以使得导接部6211将第一连接部6221和第二连接部6222导通,进而能够将电阻622短接,实现与磁感机构300的连接的负载的改变,从而实现阻力的改变。
65.在本实施例中,调节件包括至少两个按键621,按键621设置有导接部6211,第一连接部6221和第二连接部6222的数量至少为两个,两个第一连接部6221分别连接于至少一个电阻622的两端,以使得至少两个按键621中的一个被按下时,导接部6211能够将至少两个第一连接部6221中的一个及第二连接部6222导通,进而能够将对应的电阻622作为负载与磁感机构300连接,实现阻力的改变。
66.在本实施例中,至少两个按键621可以沿直线间隔排列。在其他实施例中,至少两个按键621也可以沿曲线或其他线型排列,在此不做限制。
67.一并参见图18和图19,在本实施例中,调节机构620进一步可以包括回弹组件,回弹组件能够分别作用于至少两个按键621,以使得至少两个按键621中的一个按键621被按下时,其他按键621能够被弹起,从而使得接入的电阻622数量为对应档位,各档位之间不会产生干涉,电路也不容易产生短路的现象,可靠性、安全性更高。
68.在本实施例中,按键621包括按键主体6212及设置于按键主体6212一端的按钮6213,导接部6211设置于按键主体6212的另一端,回弹组件可以包括承载板623及第一限位板624,第一限位板624上形成有倒l形或类似倒l形的第一限位槽6241,第一限位板624包括对应第一限位槽6241的限位部6242,承载板623与第一限位板624之间设置有第一弹性件6244,按键主体6212上还设置有限位块6214,按键主体6212外套设有第二弹性件6215,具体
的,当按键621未被按下时,限位块6214位于限位部6242上方;按键621被按下的过程中,第二弹性件6215被压缩产生形变,限位块6214作用于限位部6242,使得第一弹性件6244产生形变,第一限位板624相对承载板623滑动(例如图23中向左滑动),使得限位块6214能够伸入第一限位槽6241内,第一限位板624到达第一限位槽6241底部后,第一限位板624在第一弹性件6244的作用下相对承载板623滑动(例如图23中向右滑动),限位块6214被限制于限位部6242下方;当另一个按键621被按下,第一限位板624再次相对承载板623滑动(例如图23中向左滑动),被限位的按键621的限位块6214脱离对应的限位部6242,按键621能够在第二弹性件6215的作用下回弹。
69.在本实施例中,第一限位板624对应第一限位槽6241设置有倾斜面6243,倾斜面6243能够用于对限位块6214进行导向,便于限位块6214沿倾斜面6243下滑以卡入第一限位槽6241内,能够使得按键621被按下的过程更加顺畅。
70.在本实施例中,第一限位板624上还形成有容置槽6245,承载板623上设置有抵接柱6231,第一弹性件6244和抵接柱6231都容置于容置槽6245内,抵接柱6231用于与第一弹性件6244抵接,以使得第一弹性件6244在压缩过程中结构和位置更加稳定。
71.参见图20,在另一具体实施例中,第一弹性件6246还可以设置于第一限位板624的一端,且与承载板623的内壁抵接,以为第一限位板624提供弹力,结构更加简单,便于制备。
72.在本实施例中,承载板623上还可以形成有第二限位槽6232,限位块6214能够容置于第二限位槽6232内,用于实现对按键621沿其被按压方向的垂直平面(图20所示的水平面)上的限位。例如,第二限位槽6232可以对按键621实现沿承载板623的延伸方向(图20所示的左右方向)上的限位。
73.在本实施例中,按键主体6212呈圆柱形设置,第二限位槽6232还可以限制按键主体6212的转动,避免按键主体6212的转动造成限位块6214与对应的第一限位槽6241错开,进而造成限位块6214无法被压入第一限位槽6241,能够提高回弹组件的可靠性。
74.在其他实施例中,还可以在承载按键主体6212的按键壳体626和按键主体6212上分别设置对应的限位槽和限位凸起(图中未示出),以实现对按键621沿其被按压方向的垂直平面上的限位。
75.在其他实施例中,还可以直接将按键主体6212设置成矩形柱或其他异形柱,以防止按键主体6212转动,在此不做限制。
76.参见图20,在另一具体实施例中,回弹组件还可以包括多个第二限位板625,多个第二限位板625沿第一限位板624的延伸方向依次排列设置,相邻两个第二限位板625之间可以形成第三限位槽6251,以实现对按键621沿其被按压方向的垂直平面上的限位。具体的,按键621被按下后,限位块6214作用于两相邻的第二限位板625,以将两相邻的第二限位板625向限位块6214的两侧推开,其他第二限位板625之间相互靠近并抵接,以形成容置限位块6214的第三限位槽6251,实现对限位块6214的限位。
77.在本实施例中,第二限位板625上可以形成倾斜面6252,倾斜面6252能够用于对限位块6214进行导向,便于限位块6214沿倾斜面6252下滑以卡入第三限位槽6251内,能够使得按键621被按下的过程更加顺畅。
78.参见图21,在其他实施例中,电阻622的数量可以为多个,多个电阻622组成多个电阻组,每组电阻组包括至少一个电阻622,多个电阻组沿第一限位板624的延伸方向的垂直
方向间隔设置,导接部6211能够将多个电阻组中的对应的每个电阻622导通,进而能够将对应的电阻622作为负载与磁感机构300连接,实现阻力的改变。
79.参见图1、图22至图24,本技术制动装置10第四实施例包括轴体100、壳体200、磁感机构300以及调节机构630,轴体100、壳体200以及磁感机构300的结构参见上述制动装置10第二实施例,在此不再赘述,调节机构630与磁感机构300连接,用于调节阻力的大小。
80.在本实施例中,调节机构630包括电阻主体631、与电阻主体631滑动抵接的抵接件632以及与抵接件632连接的调节件633,电阻主体631及调节件633分别与磁感机构300电连接,通过设置一体的电阻主体631并通过抵接件632与电阻主体631滑动抵接以实现电阻主体631接入的阻值的无级调节,进而能够实现阻力的无级调节,进一步扩大制动装置10的适用范围。
81.在本实施例中,制动装置10进一步包括支撑件634,电阻主体631设置于支撑件634上,支撑件634形成有开口6341,用于供连接电阻主体631和磁感机构300的导线通过,能够避免导线与电阻主体631干涉甚至造成短路等,提高制动装置10的安全性。
82.在本实施例中,制动装置10进一步可以包括限位件635,限位件635对应开口6341设置,用于对抵接件632进行限位,以使得抵接件632能够保持与电阻主体631抵接,避免脱离电阻主体631,造成电路断开等问题,提高制动装置10的可靠性。
83.在本实施例中,支撑件634可以呈管状设置,电阻主体631呈扇环形设置,电阻主体631绕设于支撑件634上,使得调节机构630的结构紧凑,减小占用空间。
84.在本实施例中,抵接件632为弹性片,能够与电阻主体631弹性抵接,使得抵接件632能够保持与电阻主体631抵接,不易脱离。
85.在本实施例中,抵接件632沿支撑件634的周向延伸设置,更加有利于抵接件632在相对电阻主体631转动的过程中与电阻主体631保持抵接,可靠性更高,且更便于抵接件632在相对电阻主体631转动。
86.在本实施例中,调节件633可以包括旋钮,旋钮设置于支撑件634的一端且能够相对支撑件634转动,以带动抵接件632相对电阻主体631滑动,以实现接入磁感机构300的电阻的阻值的调节,通过设置旋钮实现调节机构630的调节,能够使得调节操作更加方便,且旋钮的占用空间较小,使得调节机构630的整体结构更加紧凑。
87.在本实施例中,制动装置10进一步可以包括外壳636,外壳636套设于支撑件634外,旋钮设置于外壳636上,外壳636设置有旋钮的端面形成有过孔6361,旋钮通过贯穿过孔6361的连接件637与抵接件632连接,能够避免连接件637与其他部件干涉,使得旋钮的转动过程更加顺畅。
88.在本实施例中,制动装置10进一步可以包括盖体(图中未示出),盖体盖设于外壳636上,能够起到对调节机构630的保护及防尘作用,也能够使得制动装置10的外观更加规整。
89.参见图25和图26,在其他实施例中,电阻主体631的数量可以为多个,例如两个、三个等,多个电阻主体631并联连接,连接件637对应连接有多个抵接件632,用于分别与对应的电阻主体631抵接,以实现阻值的无级调节。
90.参见图1、图27和图28,本技术制动装置10第五实施例包括轴体100、壳体200、磁感机构300以及调节机构640,轴体100、壳体200以及磁感机构300的结构参见上述制动装置10
第二实施例,在此不再赘述,调节机构640与磁感机构300连接,用于调节阻力的大小。
91.在本实施例中,调节机构640包括电阻主体641、与电阻主体641滑动抵接的抵接件642以及与抵接件642连接的调节件643,抵接件642与磁感机构300的一端电连接,电阻主体641的一端与磁感机构300的一端电连接,通过设置一体的电阻主体641并通过抵接件642与电阻主体641滑动抵接以实现电阻主体641接入的阻值的无级调节,进而能够实现阻力的无级调节,进一步扩大制动装置10的适用范围。
92.在其他实施例中,电阻主体641也可以为两端分别与磁感机构300的两端电连接,在此不做限制。
93.在本实施例中,制动装置10进一步可以包括外壳644,外壳644用于形成容置电阻主体641的容置空间,外壳644上形成有滑槽6441,调节件643包括手柄,调节件设置于外壳644外,并通过贯穿滑槽6441的连接杆645与抵接件642连接,使得调节件643能够受力以带动抵接件642沿滑槽6441移动,进而实现对电阻主体641的阻值的调节,通过设置滑动的调节件643实现调节机构640的调节,能够便于用户手持,使得调节操作更加方便。
94.在本实施例中,抵接件642可以通过设置于外壳644内的导电滑片(图中未示出)与磁感机构300电连接,也可以通过导线直接与磁感机构300电连接,在此不做限制。
95.参见图26、图29和图30,电阻主体641的数量可以为多个,例如三个等,调节件643可以连接有三个抵接件642,每个抵接件642分别与对应的电阻主体641抵接,以实现阻值的无级调节。
96.参见图1、图31至图33,本技术制动装置10第六实施例包括轴体100、壳体200、磁感机构300以及调节机构650,轴体100、壳体200以及磁感机构300的结构参见上述制动装置10第二实施例,在此不再赘述,调节机构650与磁感机构300连接,用于调节阻力的大小。
97.在本实施例中,调节机构650包括电阻主体651、用于与电阻主体651抵接的抵接件652以及与抵接件652连接的调节件,抵接件652与磁感机构300的一端电连接,电阻主体651的一端与磁感机构300的一端电连接,通过设置一体的电阻主体651并通过抵接件652与电阻主体651抵接的方式改变电阻主体651接入的阻值的大小,相比设置多个电阻并通过触点接触导通的方式,本实施例中由于电阻主体651的外周可设置不间断弧形触点,抵接件652与电阻主体651的抵接面积更大,可靠性更高,并且便于后续改变电阻主体651接入的阻值的大小,例如可以通过改变抵接件652与电阻主体651的抵接处的位置而改变电阻主体651接入的阻值的大小。
98.在其他实施例中,电阻主体651也可以为两端分别与磁感机构300的两端电连接,在此不做限制。
99.在本实施例中,调节件包括至少一个按键653,至少一个按键653与对应的抵接件652连接,抵接件652与磁感机构300的一端电连接,电阻主体651的一端与磁感机构300的一端电连接,使得至少一个按键653被按下时,抵接件652能够与电阻主体651导通,进而使得对应的电阻主体651的至少部分被作为负载与磁感机构300电连接,实现阻力的改变,通过设置按键653实现调节机构650的调节,能够使得调节的触感更加明显,档位调节更加可靠。
100.在其他实施例中,电阻主体651的两端也可以分别与磁感机构300的两端电连接,在此不做限制。
101.在本实施例中,制动装置10进一步包括支撑件654,支撑件654呈管状设置,电阻主
体651呈扇环形设置,电阻主体651绕设于支撑件654上,使得调节机构650的结构紧凑,减小占用空间。
102.在本实施例中,支撑件654形成有开口6541,用于供连接电阻主体651和磁感机构300的导线通过,能够避免导线与电阻主体651干涉甚至造成短路等,提高制动装置10的安全性。
103.在本实施例中,调节机构650进一步可以包括回弹组件,回弹组件包括设置于支撑件654上的第一限位板655,通过第一限位板655上的第一限位槽6551、支撑件654与第一限位板655之间的第一弹性件6552、按键653上设置的限位块6531以及套设于按键653上的第二弹性件6532实现按键653的限位和回弹,具体的,请参见上述制动装置10第三实施例中的回弹组件,在此不再赘述。
104.参见图34,在其他实施例中,电阻主体651的数量可以为多个,例如三个等,按键653对应连接有多个抵接件652,用于分别与对应的电阻主体651抵接,以实现阻值的调节。
105.参见图1、图35和图36,本技术制动装置10第七实施例包括轴体100、壳体200、磁感机构300以及调节机构660,轴体100、壳体200以及磁感机构300的结构参见上述制动装置10第二实施例,在此不再赘述,调节机构660与磁感机构300连接,用于调节阻力的大小。
106.在本实施例中,调节机构660包括电阻主体661、与电阻主体661抵接的抵接件662以及与抵接件662连接的调节件,抵接件662与磁感机构300的一端电连接,电阻主体661的一端与磁感机构300的一端电连接,通过设置一体的电阻主体661并通过抵接件662与电阻主体661抵接的方式改变电阻主体661接入的阻值的大小,抵接件662与电阻主体661的抵接面积更大,可靠性更高,并且便于后续改变电阻主体661接入的阻值的大小,例如可以通过改变抵接件662与电阻主体661的抵接处的位置而改变电阻主体661接入的阻值的大小。
107.在本实施例中,调节件包括至少两个按键663,至少两个按键663分别与对应的抵接件662连接,至少两个按键663分别设置有导接部6631,制动装置进一步包括连接部6611,连接部6611与磁感机构300的一端电连接,电阻主体661与磁感机构300的一端电连接以使得至少两个按键663中的一个被按下时,导接部6631能够与连接部6611导通,通过设置按键663实现调节机构660的调节,能够使得调节的触感更加明显,档位调节更加可靠。
108.在其他实施例中,电阻主体661的两端也可以分别与磁感机构300的两端电连接,在此不作限制。
109.在本实施例中,至少两个按键663可以沿直线间隔排列,电阻主体661呈直线形设置。在其他实施例中,至少两个按键663也可以沿曲线或其他线型排列,在此不做限制。
110.在其他实施例中,调节件可以只包括一个按键663,按键663设置有导接部6631,制动装置10进一步包括连接部6611,连接部6631与磁感机构300的一端电连接,电阻主体661的两端分别与磁感机构300的两端电连接,以使得至少一个按键663被按下时,导接部6631能够与连接部6631导通,进而能够将对应的电阻主体661的至少部分作为负载与磁感机构300连接,实现阻力的改变。
111.在本实施例中,制动装置10进一步可以包括回弹组件,回弹组件能够分别作用于至少两个按键663,以使得至少两个按键663中的一个按键663被按下时,其他按键663能够被弹起。其中,回弹组件可以包括承载板664及第一限位板665,其具体结构参见上述制动装置10第三实施例中的回弹组件,在此不再赘述。
112.参见图37,在其他实施例中,电阻主体661的数量可以为多个,例如三个等,多个电阻主体661间隔设置,按键663对应连接有多个抵接件662,用于分别与对应的电阻主体661抵接,以实现阻值的调节。
113.参见图1、图38和图39,本技术制动装置10第八实施例包括轴体100、壳体200、磁感机构300以及调节机构670,轴体100、壳体200以及磁感机构300的结构参见上述制动装置10第二实施例,在此不再赘述,调节机构670与磁感机构300连接,用于调节阻力的大小。
114.在本实施例中,调节机构670可以包括敏感电阻671,敏感电阻671的两端分别与磁感机构300的两端电连接,敏感电阻671可以为压敏电阻、光敏电阻、湿敏电阻、磁敏电阻或力敏电阻等,能够根据接收到的电压、光线、湿度、磁场强度或力的的改变而改变阻值,从而实现阻力的改变,通过设置敏感电阻671实现调节机构670的调节,能够使得调节机构670的结构更加简单、易于制备,且占用空间更小,使得制动装置10的结构更加紧凑。
115.在本实施例中,调节机构670还可以包括外壳672,外壳672上形成有散热孔6721,用于对敏感电阻671进行散热,避免敏感电阻671因温升过高造成阻值不稳定等问题。
116.在本实施例中,敏感电阻671可以为力敏电阻,多个散热孔6721之间可以形成具有一定弹性的按压板6722,以使得按压板6722能够接受力产生形变,以将力传递至敏感电阻671,实现敏感电阻671的阻值调节。
117.参见图1和图40,本技术制动装置10第九实施例包括轴体100、壳体200、磁感机构300、整流机构700以及调节机构680,轴体100、壳体200以及磁感机构300的结构参见上述制动装置10第二实施例,在此不再赘述,整流机构700与磁感机构300电连接,用于对磁感机构300的电流进行整流,调节机构680与磁感机构300连接,用于调节阻力的大小,通过设置整流机构700能够对磁感机构300的多导线输出进行整流,能够简化调节机构680的结构,使得制动装置10的整体结构更加简单、紧凑,占用空间更小。
118.在本实施例中,磁感机构300引出至少两根导线,整流机构700与至少两根导线电连接,以对至少两根导线上的电流进行整流,整流机构700的第一端与调节机构680的第一端电连接,整流机构700的第二端与调节机构680的第二端电连接,用于将整流后的电流输送至调节机构680,进而能够通过调节机构680对接入整流机构700的阻值进行调节。
119.在本实施例中,整流机构700可以包括两个第一二极管710和两个第二二极管720,两个第一二极管710的第一端相互电连接且电连接于调节机构680的第一端,两个第一二极管710的第二端分别与两根导线电连接,两个第二二极管720的第一端分别与两根导线电连接,两个第二二极管720的第二端相互电连接且电连接于调节机构680的第二端,进而能够实现对磁感机构300输出的电流的整流,例如能够将磁感机构300输出的交流电整流成直流电,能够使得调节机构680的调节过程更加稳定。
120.参见图41和图42,在另一具体实施例中,整流机构700还可以包括三个第一二极管710和三个第二二极管720,三个第一二极管710的第一端相互电连接且电连接于调节机构680的第一端,三个第一二极管710的第二端分别与三根导线电连接,三个第二二极管720的第一端分别与三根导线电连接,三个第二二极管720的第二端相互电连接且电连接于调节机构680的第二端,进而能够实现对磁感机构300输出的电流的整流,例如将磁感机构300的三相输出整流成两相输出,可通过一个电阻实现调节,能够简化调节机构680的结构。
121.在其他实施例中,整流机构70还可以包括多于三个第一二极管710及第二二极管
720,以对磁感机构300多于三相的输出进行整流,在此不做限制。
122.在本实施例中,调节机构680包括敏感电阻,整流机构700的第一端与敏感电阻的第一端连接,整流机构700的第二端与敏感电阻的第二端连接,敏感电阻能够改变阻值,从而实现阻力的改变,通过设置敏感电阻实现调节机构680的调节。
123.在其他实施例中,调节机构680还可以包括调节件及电阻,例如上述的制动装置10的第二实施例、第三实施例;或者调节机构680还可以包括电阻主体、与电阻主体滑动抵接的抵接件以及与抵接件连接的调节件,例如上述的制动装置10的第四实施例、第五实施例、第六实施例、第七实施例,在此不再赘述。
124.参见图1、图43和图44,本技术制动装置10第十实施例包括轴体100、壳体200、磁感机构300、调节机构690、控制机构810及电源存储机构820,轴体100、壳体200以及磁感机构300的结构参见上述制动装置10第一实施例,在此不再赘述,调节机构690与磁感机构300连接,用于调节阻力的大小,控制机构810分别与调节机构690和电源存储机构820连接,控制机构810用于控制调节机构690调节阻力,并且能够在电流大于或等于电流阈值时向电源存储机构820输送电流以存储,通过设置控制机构810能够实现对调节机构690的自动调节,进一步提高制动装置10的智能化程度,使得制动装置10的适用范围更广,并且通过设置电源存储机构820存储电量,能够在磁感机构300提供的电量不足的情况下向控制机构810提供电流,以使得制动装置10的可靠性更高、安全性更好。
125.在本实施例中,还可以设置外壳691,调节机构690、控制机构810及电源存储机构820都可以设置于外壳691内。
126.在本实施例中,控制机构810包括主控制器811及电源控制器812,主控制器811与调节机构690连接,电源控制器812与主控制器811连接,且分别与磁感机构300和电源存储机构820连接,电源控制器812用于接收磁感机构300提供的电流并将至少一部分电流输送至主控制器811,以维持主控制器811的正常运行,并在电流大于或等于电流阈值时将另一部分电流输送至电源存储机构820,以实现电量的存储。
127.在本实施例中,制动装置10还可以包括速度检测机构(图中未示出),速度检测机构与控制机构810通过导线813连接,速度检测机构用于检测壳体200的转速,控制机构810用于根据转速控制调节机构690调节阻力,能够使得制动装置10更加智能化。
128.在本实施例中,速度检测机构可以设置于壳体200上,也可以设置于制动装置10上,速度检测机构可以为压力传感器、图像传感器、光电传感器等,能够通过接受到的压力大小、图片、视频或光线等检测出壳体200的转速。
129.在本实施例中,调节机构690可以包括电阻主体及与电阻主体滑动抵接的抵接件(图中未示出),磁感机构300的第一端与电阻主体的第一端连接,磁感机构300的第二端与抵接件连接;或磁感机构300的第二端与抵接件和电阻主体的第二端连接,控制机构810控制抵接件相对电阻主体滑动,以改变电阻主体接入磁感机构300的阻值。具体的,调节机构690的结构可以参见上述制动装置10的第四实施例、第五实施例、第六实施例、第七实施例,在此不再赘述。
130.在其他实施例中,调节机构690还可以包括至少一个电阻及调节件,至少一个电阻的第一端与磁感机构300的第一端连接,调节件与磁感机构300的第二端连接,控制机构810控制调节件与至少一个电阻的第一端或第二端连接,以改变接入磁感机构300的电阻的总
阻值。具体的,调节机构690的结构可以参见上述制动装置10的的第二实施例、第三实施例,在此不再赘述。
131.在其他实施例中,调节机构690还可以包括敏感电阻及调节件(图中未示出),磁感机构300的两端分别与敏感电阻的两端连接,控制机构810控制调节件改变接入磁感机构300的敏感电阻的阻值。
132.参见图45和图46,在其他实施例中,制动装置10进一步可以包括整流机构700,整流机构700分别与磁感机构300和调节机构690连接,用于对磁感机构300输出的电流进行整流。其中,整流机构700的结构参见上述制动装置10第九实施例,在此不再赘述。
133.在本实施例中,整流机构700将从磁感机构300引入的至少两根导线进行整流后引出两根导线,以与调节机构690的两端电连接。在其他实施例中,也可以不设置整流机构700,而直接在调节机构690设置三组电阻、电阻主体或敏感电阻以与磁感机构300引出的三根导线电连接,具体请参见上述制动装置10实施例,在此不再赘述。
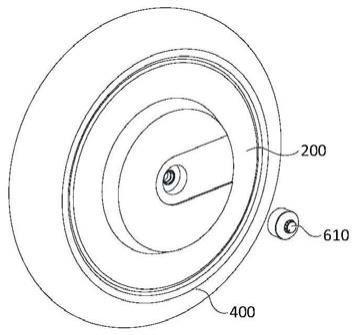
134.参见图1、图2和图47,本技术制动装置10第十一实施例包括轴体100、壳体200、磁感件310以及磁体组件320,壳体200套设于轴体100外,且与轴体100同轴设置,壳体200能够相对轴体100转动,磁感件310上绕设有线圈311,磁体组件320包括多个沿轴体100的周向间隔设置的磁体,其中,磁感件310和磁体组件320中的一者与轴体100连接,另一者与壳体200连接,且磁感件310和/或磁体组件320与轴体100或壳体200为可拆卸连接,以使得壳体200相对轴体100转动时,线圈311能够切割磁体组件320形成的磁场,从而产生与壳体200或轴体100的转动方向相反的阻力,并且能够通过更换磁感件310和/或磁体组件320以改变阻力的大小,进而能够适应不同用户、不同环境的需求,使得制动装置10的适用范围更广。
135.在本实施例中,制动装置10进一步可以包括承载件330,承载件330可拆卸连接于壳体200内侧,承载件330内侧形成有多个安装槽331,磁体组件320的多个磁体分别设置于多个安装槽331内,通过更换承载件330及承载于承载件330上的磁体组件320,能够改变磁体组件320中磁体的数量、大小以及排布结构,以改变磁体组件320产生的磁场,进而改变磁感件310和磁体组件320相互作用产生的阻力,实现阻力的调节。
136.在本实施例中,承载件330上设置有第一限位部,壳体200上设置有第二限位部,第一限位部和第二限位部配合以对承载件330进行限位,能够避免壳体200在转动的过程中承载件330相对壳体200转动,使得磁体组件320产生的磁场更加稳定,进而使得磁感件310和磁体组件320相互作用产生的阻力更加稳定。
137.在本实施例中,第一限位部可以为限位凹槽332,第二限位部可以为限位凸起210,限位凸起210和限位凹槽332沿壳体200的轴向延伸设置,以实现对承载件330沿轴体100的周向上的限位,其结构简单、易于制备,且可靠性较高。
138.在其他实施例中,第一限位部也可以为限位凸起,第二限位部可以为对应的限位凹槽,在此不做限制。
139.在本实施例中,制动装置10还可以包括固定圈340,固定圈340盖设于承载件330的一端,用于将磁体组件320卡持于安装槽331内,实现对磁体组件320沿轴体100的轴向上的限位,避免磁体组件320的磁体从安装槽331脱落。
140.参见图1、图2和图48,本技术制动装置10第十二实施例包括轴体100、壳体200、磁感件310以及磁感组件320,壳体200套设于轴体100外,且与轴体100同轴设置,壳体200能够
相对轴体100转动,磁感件310上绕设有线圈311,磁体组件320包括多个沿轴体100的周向间隔设置的磁体,其中,磁感件310和磁体组件320中的一者与轴体100连接,另一者与壳体200连接,且磁感件310和/或磁体组件320与轴体100或壳体200为可拆卸连接,以使得壳体200相对轴体100转动时,线圈311能够切割磁体组件320形成的磁场,从而产生与壳体200的转动方向相反的阻力,并且能够通过更换磁感件310和/或磁体组件320以改变阻力的大小,进而能够适应不同用户、不同环境的需求,使得制动装置10的适用范围更广。
141.在本实施例中,制动装置10进一步可以包括固定件110,固定件110固定设置于轴体100上,磁感件310可拆卸连接于固定件110,以使得磁感件310可与轴体100拆卸以进行更换,能够改变磁体组件320中磁体的数量、大小以及排布结构,以改变磁体组件320产生的磁场,进而改变磁感件310和磁体组件320相互作用产生的阻力,实现阻力的调节。
142.在本实施例中,固定件110上设置有第一连接部,磁感件310上设置有第二连接部,第一连接部和第二连接部配合以连接固定件110和磁感件310,能够避免壳体200在转动的过程中磁感件310相对轴体100转动,使得磁感件310和磁体组件320的相互作用更加稳定,进而使得产生的阻力更加稳定。
143.一并参见图49,在本实施例中,第一连接部可以为连接凹槽111,第二连接部可以为连接凸起314,且连接凸起314上形成有第一连接孔315,连接凹槽111上形成有第二连接孔112,以使得连接凸起314与连接凹槽111配合连接后能够通过贯穿第一连接孔315和第二连接孔112的连接件(图中未示出)固定,其结构简单、易于制备,且可靠性较高。
144.在本实施例中,连接凹槽111的开口朝向可以与轴体100的周向平行设置,以便于磁感件310被套在轴体100上后与固定件110扣合。
145.在其他实施例中,连接凹槽111的开口朝向还可以与轴体100的轴向平行设置,以便于磁感件310沿轴体100的轴向直接与固定件110扣合。
146.在本实施例中,第一连接孔315和第二连接孔112都可以为螺纹孔,连接件可以为螺钉。
147.在其他实施例中,第一连接部也可以为连接凸起,第二连接部也可以为对应的连接凹槽,在此不做限制。
148.在其他实施例中,固定件110和磁感件310也可以通过卡扣等其他可拆卸机构连接,在此不做限制。
149.在其他实施例中,磁感件310和磁体组件320都可以为可拆卸结构,具体结构参见上述制动装置10第十一实施例和第十二实施例,在此不做限制。
150.参见图1和图2,本技术轮体组件第一实施例包括制动装置10,制动装置10的结构参见上述制动装置10实施例,在此不再赘述。
151.其中,制动装置10的壳体200呈圆环形设置,可以用于作为轮体组件的轮体,制动装置10可直接对轮体产生阻力,从而实现制动效果,由于其制动力与壳体200的转动有关,而非摩擦制动,因此不会产生急停效果,安全性更高,也能够减小磨损,提高制动装置10的使用寿命,同时其结构简单,易于制备。
152.参见图50,本技术轮体组件第二实施例包括制动装置10和轮体20,轮体20与制动装置10的壳体200或轴体100连接,制动装置10通过壳体200或轴体100对轮体产生阻力,从而实现制动效果。
153.在本实施例中,制动装置10与轮体20可以为可拆卸连接,使得用户可以根据需要选择是否安装制动装置10,适用范围更广。
154.在本实施例中,制动装置10可以直接通过连接杆201与轮体20连接,以直接实现对轮体20的制动效果。
155.在其他实施例中,制动装置10还可以通过传动装置(图中未示出)与轮体20连接,以适应不同的制动需求,扩大适用范围。
156.参见图51,本技术助行器第一实施例包括制动装置10及主体架30,制动装置10转动连接于主体架30的底部,用于随主体架30运动和/或带动主体架30运动。在本实施例中,制动装置10的数量为2,且作为助行器的前轮,助行器还包括两个万向轮40作为后轮,通过将制动装置10作为前轮,能够使得助行器的转向操作更加省力,将万向轮40作为后轮,能够便于万向轮40随主体架30的转向灵活转动。
157.在其他实施例中,两个制动装置10也可以作为后轮(图中未示出),同时将两个万向轮40作为前轮,能够避免制动装置10瞬时产生的阻力过大造成前翻或侧翻的问题。
158.在其他实施例中,制动装置10的数量可以为4,即作为助行器的前轮也作为助行器的后轮,能够进一步提高制动效果。
159.本实施例中制动装置10的壳体200相对轴体100转动时,线圈311能够切割磁体组件320形成的磁场,从而产生与壳体200的转动方向相反的阻力,能够对制动装置10起到制动作用,并且由于其制动力与壳体200的转动有关,而非摩擦制动,因此不会产生急停效果,安全性更高,也能够减小磨损,提高制动装置10的使用寿命,同时其结构简单,易于制备。
160.参见图52,本技术助行器第二实施例包括制动装置10及主体架50,制动装置10转动连接于主体架50的底部,用于随主体架50运动和/或带动主体架50运动。
161.在本实施例中,制动装置10既可以作为助行器的前轮,也可以作为助行器的后轮,具体参见上述助行器第一实施例,在此不再赘述。
162.本实施例中制动装置10的壳体200相对轴体100转动时,线圈311能够切割磁体组件320形成的磁场,从而产生与壳体200的转动方向相反的阻力,能够对制动装置10起到制动作用,并且由于其制动力与壳体200的转动有关,而非摩擦制动,因此不会产生急停效果,安全性更高,也能够减小磨损,提高制动装置10的使用寿命,同时其结构简单,易于制备。
163.在其他实施例中,制动装置10也可以应用于其他类型的助行器中,在此不做限制。
164.以上所述仅为本技术的实施方式,并非因此限制本技术的专利范围,凡是利用本技术说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本技术的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1