具有选择性硬度的柔性插管的制作方法
1.本公开总体上涉及用于微创手术的手术器械。特别地,本公开涉及具有选择性硬度的柔性插管。
背景技术:
2.微创外科手术是外科医生通过患者皮肤中的一个或多个小开口或自然形成的开口(例如,嘴、肛门或阴道)进入患者身体的手术。与传统的开腹手术相比,微创手术有几个优点和缺点。微创手术包括关节镜、内窥镜、腹腔镜和胸腔镜手术。在腹腔镜和内窥镜外科手术中,在患者的身体(例如,在腹部)做出小切口或穿孔,以为插入到切口中的手术进入装置提供进入点,且有助于插入用于在内部手术部位内执行外科手术的器械。微创手术的优点在于,与传统的开腹外科手术相比,由于穿过患者身体形成相对较小的切口,减少了对患者的创伤和恢复时间。然而,由于这些进入切口很小,因此只能使用细长的小直径器械来进入内部体腔和器官。
3.在这样的手术中,诸如手术进入装置(例如,套管)等手术物体通过组织中的切口插入到患者体内。通常,在将手术物体引入患者体内之前,使用吹入气体扩大目标手术部位周围的区域以创建更大、更容易进入的工作区域。然后,外科医生能够通过操纵已延伸穿过进入装置的器械在腹腔内执行该手术。在内在躯体内操纵这样的器械同样受到空间限制和将体腔保持在充气状态的需要的限制。
技术实现要素:
4.手术进入装置包括壳体和从壳体延伸的管状构件。管状构件具有近侧开口和远侧开口,并且包括外壁和内壁,在二者之间限定了环形内腔。通道在近侧开口和远侧开口之间延伸并且配置成接收穿过其中的手术器械。导管沿着管状构件的长度延伸并且设置在环形内腔中。导管可在第一状态和第二状态之间转换。导管包括螺旋段,其中每个螺旋段与相邻的螺旋段接合,使得导管在第一状态下具有柔性构造并且在第二状态下具有固定构造。阀组件联接到壳体,并且包括与环形内腔流体连通并且可附接到流体源的端口。
5.在一方面,流体可设置在环形内腔中。
6.在另一方面,在环形内腔中存在流体的情况下,导管可以转换到第一状态。
7.在另一方面,在环形内腔中不存在流体的情况下,导管可以转换到第二状态。
8.在另一方面,每个螺旋段可以具有第一部分和第二部分,其中第一部分和第二部分中的每一个可以具有大致c形的横截面构造。
9.在一些方面,每个螺旋段的第一部分可以相对于相邻螺旋段的第二部分滑动,使得导管处于第一状态。
10.在一方面,每个螺旋段的第一部分可以相对于相邻螺旋段的第二部分固定,使得导管处于第二状态。
11.在另一方面,管状构件可以是柔性的并且适于在其中接收柔性手术器械。
12.在一些方面,环形内腔的内壁和外壁可以接触导管的螺旋段的表面。
13.一种进入手术部位的方法包括通过组织中的开口定位手术进入装置的管状构件,将管状构件的远侧部分朝目标部位引导,操纵管状构件以在管状构件处于第一状态时遵循预定路径,并且从限定在管状构件的内壁和外壁之间的环形内腔移除流体,从而将管状构件从第一状态转换到其中管状构件是刚性的第二状态。
14.在一方面,操纵管状构件可包括操纵设置在管状构件的环形内腔中的导管。
15.在另一方面,操纵导管可包括操纵导管的螺旋段,使得一个螺旋段的第一区段可滑动地接合相邻螺旋段的第二区段。
16.在另一方面,从环形内腔移除流体可导致内腔的内壁和外壁接触导管的螺旋段的表面。
17.在又一方面,从环形内腔去除流体可导致设置在环形内腔中的导管的螺旋段的第一区段相对于导管的相邻螺旋段的第二区段变为固定的,从而限定管状构件的第二状态。
18.在一方面,该方法可包括在管状构件处于第一状态时插入柔性手术器械穿过管状构件。
19.在另一方面,从环形内腔移除流体可包括操作壳体上的阀,壳体联接到管状构件的近侧。
20.在又一方面,该方法可包括将流体引入环形内腔从而将管状构件从第二状态转换到第一状态并且可包括从组织中的开口移除管状构件。
21.在一方面,将流体引入环形内腔可包括操作壳体上的阀,壳体联接到管状构件的近侧。
22.从以下描述将理解本公开的其它特征。
附图说明
23.并入在本说明书中且构成本说明书的部分的附图示出了本公开的方面和特征,且连同下文的具体实施方式一起用以进一步解释本公开,其中:
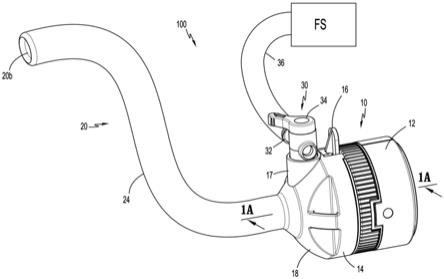
24.图1是根据本公开的一方面的具有壳体和处于第一状态的管状构件的手术进入装置的透视图;
25.图1a是沿图1的剖面线1a-1a截取的壳体和管状构件的近侧区域的剖视图;
26.图2是图1的手术进入装置的管状构件的远侧部分的透视图,以虚线示出导管;
27.图3是图2的导管的透视图;
28.图4是图3中所示的细节区域的放大视图;
29.图5是沿着图2的剖面线5-5截取的管状构件的远侧部分的侧视横截面视图;
30.图6是图1的手术进入装置的处于第二状态的管状构件的侧视图;
31.图7是沿图6的剖面线7-7截取的侧视横截面视图;
32.图8是图1的插入组织中的手术进入装置的侧视图,其中管状构件处于第二状态。
具体实施方式
33.在下文中参考附图描述本公开的各方面;然而,应理解,所公开的方面仅示范本公开,并且可以各种形式体现。未详细描述众所周知的功能或配置以避免在不必要的细节上
混淆本公开。因此,本文中所公开的具体结构和功能细节不应被解释为限制性的,而是仅作为权利要求书的基础,并且作为用于教示所属领域的技术人员以在实际上任何适当的详细结构中来不同地采用本公开的代表性基础。
34.本公开的一方面的技术特征的描述应通常被视为可用的且适用于本公开的另一方面的其它类似特征。因此,根据本公开的一个方面的本文所描述的技术特征可适用于本公开的其它方面,且因此可在本文中省略重复的描述。在整个说明书以及图式中,相同附图标号可指代相同元件。
35.最初参考图1和图1a,根据本公开的手术进入装置被图示并标识为手术进入装置100。手术进入装置100具有壳体10和从其延伸的管状构件20。管状构件20是由合适的生物相容性聚合材料(例如,硅橡胶或三元乙丙(epdm)橡胶)具有限定在其间延伸的通道28的近侧开口20a和远侧开口20b。用于管状构件20的聚合材料允许管状构件20在多个方向上是柔性的,从而允许管状构件20的多种构造。壳体10包括可释放地联接到下部壳体14的上部壳体12。突出部16从下部壳体14径向延伸并且可致动以允许上部壳体12和下部壳体14之间的相对旋转。上部壳体12和下部壳体14之间的相对旋转允许上部壳体12和下部壳体14彼此联接在一起或彼此分离。下部壳体14具有截头圆锥区域18并且管状构件20从其延伸。阀组件30从截头圆锥区域18横向延伸并且可经由柔性管36附接到流体源“fs”。壳体10具有穿过其中延伸的通道15,该通道与管状构件20的近侧开口20a同轴。holsten等人共同拥有的美国专利no.10,022,149中公开了合适的壳体的示例,以及kleyman所拥有的美国专利申请公布no.2015/0031958,其全部内容通过引用整体并入本文。
36.流体源“fs”可以向管状构件20的环形内腔26提供加压流体和/或可以向管状构件20的环形内腔26提供真空。简要参考图5,环形内腔26限定在管状构件的外壁24和内壁22之间。流体通过阀组件30从环形内腔26引入或排出。阀组件30包括端口32和诸如旋塞阀的阀34。阀34的打开位置允许流体在环形内腔26和端口32之间流动,而阀34的关闭位置将端口32与环形内腔26隔离开。阀组件30装配到下部壳体14的截头圆锥区域18中的接收器17中,从而在阀组件30的底面和接收器17的底面之间限定腔室19。管状构件20的环形内腔26经由通道21流体联接到接收器17的腔室19。通过该布置,打开阀34允许流体流入或流出环形内腔26。同样地,关闭阀34禁止流体流入或流出环形内腔26。
37.现在参考图2,管状构件20的一部分被示为处于第一状态。带缠绕的软管或导管40设置在管状构件20中。导管40由生物相容性金属(例如,不锈钢)形成。如图3和图4所示,导管40包括互锁螺旋段42,其螺旋缠绕在管状构件20的近侧开口20a和远侧开口20b之间。每个螺旋段42包括第一部分44和第二部分46。另外参考图5,每个螺旋段42的第一部分44包括第一凸缘44a和第一槽44b,每个螺旋段42的第二部分46包括第二凸缘46a和第二槽46b。隔板45连接第一槽44b和第二槽46b并且与第一槽44b和第二槽46b正交延伸。因此,螺旋段42的横截面视图具有方波图案。第一凸缘44a可滑动地设置在第二槽46b中,而第二凸缘46a可滑动地设置在第一槽44b中。在管状构件20的第一状态下,导管40的螺旋段42相对于彼此自由移动。因此,当由外科医生操纵时,第一凸缘44a在第二槽46b中滑动并且第二凸缘46a在第一槽44b中滑动,从而允许外科医生操纵管状构件20和导管40以实现遵循通过身体组织的期望路径的特定取向。
38.参考图5,并且如上所述,管状构件20的内壁22和外壁24在其间限定环形内腔26。
环形内腔26从管状构件20的近侧延伸到管状构件20的远侧。环形内腔26具有封闭的远侧。当阀组件30的阀34处于关闭构造时,环形内腔26具有流体密封构造。导管40设置在环形内腔26中。当环形内腔26充满流体(例如,无菌盐水、co2或空气)时,内壁22和外壁24远离彼此移动,从而在导管40与内壁22和外壁24之间限定间隙。在该柔性构造(即,第一状态)中,包括导管40的管状构件20具有多个自由度并且可以弯曲和铰接成多种构造,从而允许管状构件20遵循穿过组织的期望路径以到达目标部位。
39.现在参考图6和图7,示出了管状构件20的第二状态。通过排空或去除环形内腔26中的流体,限定环形内腔26的内壁22和外壁24沿箭头“a”的方向朝向彼此移动并且挤压内壁22和外壁24之间的导管40从,而消除了导管40与内壁22和外壁24之间的间隙。通过在环形内腔26的内壁22和外壁24之间挤压导管40的螺旋段42,凸缘44a、46a摩擦地接合槽44b、46b。特别地,第一凸缘44a摩擦地接合第二槽46b并且第二凸缘46a摩擦地接合第一槽44b。因此,导管40的每个螺旋段42相对于导管40的相邻螺旋段42固定。这种布置以特定取向固定导管40并因此固定管状构件20。
40.与图1所示的管状构件20的柔性状态(即,第一状态)相反,管状构件20的固定状态(即,第二状态)在图8中示出。具体地,处于第二状态的管状构件20保持通过身体组织“t”的期望路径。该穿过组织的固定路径允许柔性手术器械“i”插入穿过外壳10并且跟随管状构件20的第二状态到达目标部位而不偏离所选路径。
41.在使用中,外科医生通过患者皮肤“s”中的开口“o”插入处于柔性或第一状态(图1)的管状构件20(图8)。然后外科医生操纵管状构件20穿过组织“t”以到达目标部位。由于管状构件20在第一状态下是柔性的,因此即使目标部位被身体中的其他结构阻塞或阻碍,外科医生也能够根据需要操纵管状构件20以到达目标部位。一旦管状构件20的远侧到达目标部位,外科医生从环形内腔26排出流体,导致管状构件20的内壁和外壁22、24压靠导管40的螺旋段42,将管状构件20转换成固定或第二状态(图7)。在第二状态下,凸缘44a、46a与螺旋段42的槽44b、46b之间的摩擦接合保持导管40的构造(图7)。由于导管40设置在管状构件20的环形内腔26中,管状构件20也保持相同构造。这允许外科医生将柔性手术器械“i”插入穿过外壳10和管状构件20并利用柔性手术器械“i”(图8)进入目标部位。
42.本领域技术人员将理解,本文中具体地描述并在附图中示出的装置和方法是非限制性的。据设想,在不脱离本公开的范围的情况下,元件和特征可与另一元件和特征组合。同样,本领域技术人员将理解本公开的其它特征和优点。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1