一种分离UWB雷达传感器接收信号的方法
一种分离uwb雷达传感器接收信号的方法
技术领域
1.本发明涉及雷达信号处理领域,具体为一种基于递归积分算子的零空间追踪(recursion integral null space pursuit:hinsp)提取单信号分量算法进行uwb雷达传感器接收信号的非接触心率和呼吸信号频率估计分量,为非接触人体特征提取提供重要依据的方法。
背景技术:
2.随着社会的发展,尤其是科学技术的进步,大大促进了社会生产力的飞速发展,尤其是先进医疗仪器的广泛应用,不仅仅能够很好的治疗疾病,同时对于身体健康的日常保健监测也提供了重要保障。
3.人体生命体征主要包括呼吸、心率、脉搏、血压等;在医疗临床上,通过采集这几种生物信息来准确了解人体的生理状况,具有重要的临床意义。近年来,超宽带雷达在监测人体体征方面越来越受学者的关注,主要包括两个方面:一个是在医学重症监护和家庭健康管理方面对呼吸和心跳的连续监测;二是在自然灾害发生时可快速检测到有无生命体,来及时进行优先救援。
4.使用uwb雷达传感器对人体进行非接触性检测生命体征,接收到的信号是非线性非平稳信号,信号除了人体体征信号之外,还有各种杂波信号的干扰,比如基线漂移和工频干扰等等。人体正常的呼吸信号频率大致在[0.15,0.40]之间,心率大致在[0.8,1.68]之间,呼吸的谐波会很大程度上的影响心率的提取,因此有效的抑制杂波和准确地提取心率是分离uwb雷达信号的首要任务。
[0005]
现有技术中,常见的信号分解的方法包括傅里叶变换、小波变换、经验模态分解(emd)等。基于傅里叶变换的滤波器可以提取信号不同频段的信息,以此来分析信号在频域的特征。
[0006]
但是傅里叶分析将原信号看作是一系列正余弦函数的线性叠加形式,对于uwb雷达传感器接收到的这类复杂的非平稳非线性信号来说,信号处理起来繁琐而又不准确;小波变换将信号分解为不同尺度(分辨率)的序列,具有同时在时域和频域表征信号局部特征的能力,但是小波变换需要根据先验知识选择母小波函数,而且与傅里叶变换一样都受测不准原理的制约,即时域和频域的分辨率不可兼得;经验模态分解可以将非平稳信号分解为多个本征模函数(imf),所分解出来的imf包含了原信号的不同时间尺度的局部特征信号,经验模态分解虽然能提取信号的本征模态,但是缺乏数学理论解释,而且会出现模态混叠等现象。
[0007]
因此,上述现有的分离uwb雷达信号的方法最后都需要人为的观察选择出适合的信号分量;而如何在少量或者没有人为干预的情况下选择出合适心率和呼吸信号频率是uwb雷达探测信号分解的重要急需解决的问题。
技术实现要素:
[0008]
为了克服上述现有技术存在的不足,本发明提供了一种基于递归积分算子的零空间追踪(recursion integral null space pursuit:rinsp)提取单分量信号算法和置信度的uwb雷达传感器接收信号的非接触呼吸和心跳信号频率提取,用以解决传统在雷达信号分离上存在着的诸多弊端的分离uwb雷达传感器接收信号的方法。
[0009]
本发明的目的是这样实现的:
[0010]
一种分离uwb雷达传感器接收信号的方法,即基于递归积分算子的零空间追踪提取单分量信号算法和置信度对uwb雷达传感器接收信号进行信号分解,提取人体的呼吸信号和心跳信号频率的方法,包括以下步骤:
[0011]
步骤(1)uwb雷达传感器信号预处理阶段:包括信号的突变点检测,若信号含有突变值,则去掉突变处的局部信号,并通过三次样条插值法补全信号,再通过带通录波器滤除杂波,并将信号归一化到[
‑
1,1]之间;
[0012]
步骤(2)利用递归积分算子的零空间追踪(recursion integral null space pursuit:rinsp)算法分解信号,得到信号的多个不同频带的单分量信号,将这些单分量信号构成决策树;
[0013]
步骤(3)为了估计能准确估计心率和呼吸信号频率,我们定义决策树分支并进行预分组,定义了分量的置信度,根据置信度提取出分量中最优的信号频率为心率和呼吸信号频率。
[0014]
所述步骤(1)uwb雷达传感器信号预处理阶段具体为:
[0015]
1)找出原始uwb雷达信号的局部最大值点和局部最小值点,最大值点对应的横轴为d
max
,纵轴为v
max
,最小值点对应的横轴为d
min
,纵轴为v
min
;
[0016]
2)检验局部最大值之间的差值的绝对值,如其中有连续两个差值的绝对值大于50,则这三个点之间的值是为突变值,中间点视为突变点;
[0017]
3)若第i个点为突变点则重新计算第i个点的横轴和纵轴,
[0018][0019][0020]
再使用三次样条插值法对第i节点和距离第i节点最近的两个最小值点进行插值;
[0021]
4)检验局部最小值方法同上1)到3);
[0022]
5)将上述补齐信号s(t)带入下步骤,如果没有突变点则将原始信号视为s(t)带入下步骤;
[0023]
6)使s(t)通过带通滤波器(0.1hz~2.5hz),对信号进行归一化。
[0024]
所述步骤(2)具体为:
[0025]
1)输入y(t)和参数λ2,选择停止阈值ε,λ0和γ0的值;
[0026]
2)令j
←
0,γ
j
←
γ0;
[0027]
3)估计
[0028][0029]
4)估计
[0030][0031]
计估计
[0032][0033]
估计γ
j+1
:
[0034][0035]
再令j=j+1;
[0036]
5)重复4)直至
[0037]
6)分离的单分量信号为剩余信号为
[0038]
7)将剩余信号和单分量信号作为输入重复上述操作可分离出不同的单信号。
[0039]
所述步骤(3)具体为:
[0040]
1)为了能准确估计心率和呼吸信号频率,我们基于分量置信度估计出最优心率和呼吸信号频率;具体来说:对每个单分量信号,定义呼吸分量组,其峰值频率范围为fp
(i,j)
(x)∈[0.15,0.40]就归为呼吸信号预备组,其中x=1,2,3,...,30;(i,j)为组号为下标,其中i=1,2,3,4,5,6;j=1,2,3,4,5,6,(i,j)∈k。
[0041]
定义心跳分量组,其峰值频率在fp
(i,j)
(x)∈[0.8,1.68].分别将两组的各分量最大峰值频率fp
(i,j)
(x)与接触性传感器接收信号的最大频率fp
s
(x)进行对比分析。
[0042]
定义分量的置信度为利用最优置信度,找出将其对应的分量作为对应分量特征。
[0043]
积极有益效果:本发明公开了一种基于递归积分算子的零空间追踪(recursion integral null space pursuit:rinsp)提取单分量信号算法和置信度的uwb雷达传感器接收信号的非接触心率和呼吸频率估计的方法,该方法是无监督的不需要先验知识,算法简单所以可以进行实时检测;能够有效抑制杂波,减小模式混叠的影响;分离出的呼吸频率和心率置信度高,从而可以从废墟中检测生命体的是否存在,可应用于对传染病患者的心率等生命体征进行监测也可用于地震时探测人体体征。
附图说明
[0044]
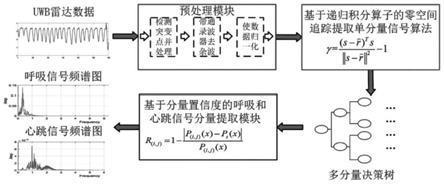
图1为本发明的uwb雷达传感器信号分离出呼吸和心跳信号的流程图;
[0045]
图2为雷达信号分离流程图;
[0046]
图3为探地雷达实测的部分人体体征混合信号图;
[0047]
图4为利用本发明提取出的呼吸信号与传感器接收信号的时域对比图;其中红色的线是分离出的信号分离,蓝色的线是接触性传感器接受到的信号;
[0048]
图5为用本发明提取心率与接触性传感器接收的心率做比较得到的bland
‑
altman图;
[0049]
图6为采用本发明提取呼吸频率和接触性传感器接收的呼吸频率做比较得到心率bland
‑
altman图。
具体实施方式
[0050]
下面结合附图对本发明做进一步详细的说明。
[0051]
如图1
‑
4所示,一种分离uwb雷达传感器接收信号的方法,即基于递归积分算子的零空间追踪提取单分量信号算法和置信度对uwb雷达传感器接收信号进行信号分解,提取人体的呼吸信号和心跳信号频率的方法,包括以下步骤:
[0052]
步骤(1)uwb雷达传感器信号预处理阶段:包括信号的突变点检测,若信号含有突变值,则去掉突变处的局部信号,并通过三次样条插值法补全信号,再通过带通录波器滤除杂波,并将信号归一化到[
‑
1,1]之间;
[0053]
步骤(2)利用递归积分算子的零空间追踪(recursion integral null space pursuit:rinsp)算法分解信号,得到信号的多个不同频带的单分量信号,将这些单分量信号构成决策树;
[0054]
步骤(3)为了估计能准确估计心率和呼吸信号频率,我们定义决策树分支并进行预分组,定义了分量的置信度,根据置信度提取出分量中最优的信号频率为心率和呼吸信号频率;该算法运时间短,能够精确的提取uwb探地雷达信号中的呼吸信号和心跳信号频率,为非接触人体特征提取提供重要依据。
[0055]
所述步骤(1)uwb雷达传感器信号预处理阶段具体为:
[0056]
1)找出原始uwb雷达信号的局部最大值点和局部最小值点,最大值点对应的横轴为d
max
,纵轴为v
max
,最小值点对应的横轴为d
min
,纵轴为v
min
;
[0057]
2)检验局部最大值之间的差值的绝对值,如其中有连续两个差值的绝对值大于50,则这三个点之间的值是为突变值,中间点视为突变点;
[0058]
3)若第i个点为突变点则重新计算第i个点的横轴和纵轴,
[0059][0060][0061]
再使用三次样条插值法对第i节点和距离第i节点最近的两个最小值点进行插值;
[0062]
4)检验局部最小值方法同上1)到3);
[0063]
5)将上述补齐信号s(t)带入下步骤,如果没有突变点则将原始信号视为s(t)带入下步骤;
[0064]
6)使s(t)通过带通滤波器(0.1hz~2.5hz),对信号进行归一化。
[0065]
所述步骤(2)具体为:
[0066]
1)输入y(t)和参数λ2,选择停止阈值ε,λ0和γ0的值;
[0067]
2)令j
←
0,γ
j
←
γ0;
[0068]
3)估计
[0069][0070]
4)估计
[0071][0072]
计估计
[0073][0074]
估计γ
j+1
:
[0075][0076]
再令j=j+1;
[0077]
5)重复4)直至
[0078]
6)分离的单分量信号为剩余信号为
[0079]
7)将剩余信号和单分量信号作为输入重复上述操作可分离出不同的单信号。
[0080]
所述步骤(3)具体为:
[0081]
1)为了能准确估计心率和呼吸信号频率,我们基于分量置信度估计出最优心率和呼吸信号频率;具体来说:对每个单分量信号,定义呼吸分量组,其峰值频率范围为fp
(i,j)
(x)∈[0.15,0.40]就归为呼吸信号预备组,其中x=1,2,3,...,30;(i,j)为组号为下标,其中i=1,2,3,4,5,6;j=1,2,3,4,5,6,(i,j)∈k。
[0082]
定义心跳分量组,其峰值频率在fp
(i,j)
(x)∈[0.8,1.68].分别将两组的各分量最大峰值频率fp
(i,j)
(x)与接触性传感器接收信号的最大频率fp
s
(x)进行对比分析。
[0083]
定义分量的置信度为利用最优置信度,找出将其对应的分量作为对应分量特征。
[0084]
使用专业用图bland
‑
altman图来评判结果的好坏,如图5、图6所示,分别显示的是30组信号的心率bland
‑
altman图和呼吸频率bland
‑
altman图;bland
‑
altman是分析确定使用两种不同方法的测量值一致限度的有效方法,该图描述了接触传感器记录的生理信号与雷达提取的生理信号之间相对于这两个信号的平均值的偏差。bland
‑
altman图是一个散点
图,其中x轴对应两个度量值的平均值,y轴代表它们的差值,在散点图上也显示了95%置信协议区间。统计一致性界限是通过使用两个测量值之间的差值的平均值(md)和标准差(sd)计算的.
[0085]
本发明公开了一种基于递归积分算子的零空间追踪(recursion integral null space pursuit:rinsp)提取单分量信号算法和置信度的uwb雷达传感器接收信号的非接触心率和呼吸频率估计的方法,该方法是无监督的不需要先验知识,算法简单所以可以进行实时检测;能够有效抑制杂波,减小模式混叠的影响;分离出的呼吸频率和心率置信度高,从而可以从废墟中检测生命体的是否存在。
[0086]
以上给出了具体的实施方式,但本发明不局限于所描述的实施方式。本发明的基本思路在于上述基本方案,对本领域普通技术人员而言,根据本发明的教导,设计出各种变形的模型、公式、参数并不需要花费创造性劳动。在不脱离本发明的原理和精神的情况下对实施方式进行的变化、修改、替换和变型仍落入本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1