心内科人工呼吸辅助装置的制作方法
1.本发明涉及医疗器械技术领域,具体为一种心内科人工呼吸辅助装置。
背景技术:
2.心内科患者出现心跳和呼吸停止现象时,需要及时进行人工呼吸,保护患者的生命特征,以等待其他医疗人员到位或者医疗设备准备齐备,要及时进一步救治,否则可能会危及患者的生命。
3.传统的人工呼吸操作步骤是这样的。
4.1)用按于前额一手的拇指与食指捏闭患者的鼻孔,将另一只手的手指置于下巴的骨性部位,温和的将头向后倾斜并且同时抬起下巴,保持患者气道处于开放状态,然后抢救者深呼一口气后,张开口紧贴患者的口(注意要把患者的口部完全包住)。
5.2)用力向患者口腔里吹气,吹气要求快而深,使胸廓隆起,然后离开患者口腔,直至患者胸部向下塌,有气流从口鼻排除。
6.3)一次吹气回完毕后,立即与患者口部脱离,轻轻抬起头部,眼看患者的胸部,是否抬起,以便做下一次人工呼吸,同时放松捏鼻的手,以便患者胸部向下塌陷,有气流从口鼻排出。
7.4)每次吹气气量为800
‑
1200毫升。但每次吹气量不要超过1200毫升,以免造成肺内大量充气。儿童吹气量视年龄不同而异,以胸廓上抬为准。
8.5)单人进行人工答呼吸,每按压胸部15次,吹气2次,即15:2;双人进行人工呼吸,每按压胸部5次吹气1次,即5:1;有脉搏无呼吸者,每5秒钟吹气1次,即每分钟吹气12
‑
16次。
9.人工呼吸的劳动量较大,抢救者很容易劳累。人工呼吸也不卫生,张开口紧贴患者的口,如果有传染性疾病则很容易传染。然后,在医疗人员和设备没准备好之间,这是急救最简单有效的措施。
10.也有人研制了人工呼吸专用设备。例如申请号为cn202010729174.7、发明名称为《一种心内科急救用胸腹部按压装置》的专利文献,公开了一种心内科急救用胸腹部按压装置,包括座体,所述座体的上侧壁固定连接有支杆,所述支杆的端部固定连接有电机,所述电机的驱动端固定连接有凸轮和齿轮,所述座体的上侧安装有与齿轮相啮合的不完全齿轮,所述所述支杆的外壁上滑动套设有升降板,所述支杆的外壁上套设有位于升降板下侧与座体上侧壁之间的伸缩弹簧,所述升降板的端部固定连接有竖杆,所述竖杆的上端固定连接有凸轮外壁相接触的弧形板,所述竖杆的下端固定连接有按压垫。本发明通过实现按压垫往复进行胸腹部按压的同时进行罩体内的一次呼吸式运动,实现胸腹部按压的同时进行人工呼吸,满足了医疗需求,减少人工操作,并设置扩口机构方便人工呼吸运动的进行。
11.然而,该发明也存在这样的缺陷。
12.1)电机通过凸轮驱动弧形板和按压垫刚性地向下移动,按压患者的胸部,行程的下部终点位置是固定的,向下按压的力量大小是不能控制的,取决于电机的额定扭矩大小,患者的体形特征各不相同,有的胖有的瘦,有的体质强壮,有的体质软弱,该发明的适应性
较差,患者处于昏迷状态又不能对所受的外力做出反应,遇到体形胖的也可能按压的过重,遇到瘦也可能按压的距离不够,遇到体质弱的也可能力量过大一下把肋骨压断,该发明中没有公开如何根据患者的体形特征适应性地调整按压垫的行程和力度。
13.2)该发明中齿轮与不完全齿轮的周长比为1:15,或者是确定的其它比例,实现齿轮转动十五圈,即凸轮转动十五圈,不完全齿轮转动一圈,实现按压垫往复按压十五次的同时罩体内进行呼吸式运动一次,同时进行胸腹部按压以及人工呼吸运动,按压次数和呼吸次数的比例是确定的,按压组件和呼吸组件的驱动装置是同一台电机,两个组件不是独立运动的,不可单独调整,要想调整,只能拆卸和安装一套新的齿轮与不完全齿轮,改变齿轮与不完全齿轮的周长比例,更换一次需要消耗较长时间的劳动量,在急救中患者不可能等待较长的时间,那会延误病情,或者更换另一台齿轮与不完全齿轮比例合适的该发明设备,那会占压医疗单位较多的资金,也需要较大的库房来存放多台该发明设备,也需要较长的周转时间。不同的患者需要的按压次数和呼吸次数的比例也不同,同一个患者处于病情的不同阶段也需要调整该比例,所以该发明设备需要实时调整各自的工作频率。
14.3)该发明的扩口机构,通过滑块的旋转实现连接块的上下移动,使转杆一和转杆二的端部转动收缩或撑起,改变支撑板之间的距离,适用于不同的患者,通过支撑板将患者的口部撑起,避免患者口部闭合影响气体流通,并方便人工呼吸式运动的进行;然而并没有公开通过什么机构驱动滑块的旋转,也没有公开如何控制支撑板的支撑力大小,会不会造成患者口部的伤害,此处公开不充分。
技术实现要素:
15.本发明就是针对现有技术存在的上述不足,提供一种安全性好、调整方便、工作效率高、自动化和智能化水平高的心内科人工呼吸辅助装置。
16.为实现上述目的,本发明提供如下技术方案:
17.一种心内科人工呼吸辅助装置,包括病床、医用氧气罐和机架;
18.还包括呼吸机器人、呼吸组件、按压机器人、按压组件、plc电控系统、高压气源和医用氧气罐;
19.呼吸机器人的底座和按压机器人的底座分别与机架固定联接;
20.呼吸组件包括呼吸罩、气动手指、口腔撑指、呼吸下压气缸和联接细杆;呼吸下压气缸是带导型的气缸;呼吸下压气缸的第一端和呼吸机器人的工作端固定联接;气动手指是同步摆动夹爪,气动手指包括气动手指缸体和两个摆动手指,两个摆动手指同步相向或相背摆动;两个口腔撑指分别和两个摆动手指固定联接;气动手指缸体通过联接细杆和呼吸下压气缸的第二端固定联接;呼吸罩是杯形,呼吸罩的开口朝下,呼吸罩把气动手指和口腔撑指罩在里面;呼吸罩的上底面有贯穿的孔,呼吸罩上底面的孔和联接细杆密封地固定联接;呼吸罩的制造材料是柔软且有弹性的工程塑料,比如医用橡胶或者医用硅胶;
21.病人平躺在病床上,人工操纵呼吸机器人,呼吸机器人驱动呼吸组件移动,使呼吸下压气缸沿着竖直方向放置,使呼吸罩位于口腔和鼻腔的正上方,人工使患者张开口,呼吸下压气缸驱动呼吸罩、气动手指、口腔撑指和联接细杆的组合向下平移,两个口腔撑指分别伸入患者口腔;因为呼吸罩是柔软且有弹性的,呼吸罩可以发生弹性变形,为操作者的手避让开操作活动空间;操作者的手离开后,呼吸罩的下边缘密封地贴附在患者面部、位于口腔
和鼻腔的周围;气动手指驱动两个口腔撑指相向离开,使患者保持张开口的状态;
22.呼吸下压气缸通过电磁方向控制阀和高压气源相连通;呼吸下压气缸的无杆腔还连接设置了第一可调式减压阀,呼吸下压气缸驱动呼吸罩、气动手指、口腔撑指和联接细杆的组合向下平移时,驱动力保持在与患者的承受力相适应的压力,当驱动力过大时,呼吸下压气缸的无杆腔内的压力空气通过第一可调式减压阀排出,使驱动力不能升高太多,一方面防止压伤患者面部,另一方面又能保证呼吸罩的下边缘密封地贴附在患者面部;
23.气动手指还连接设置了第二可调式减压阀,气动手指驱动两个口腔撑指相向离开,撑开患者口部,当撑紧力再增大时,通过第二可调式减压阀泄去过大的压力,使撑紧力保持合适的大小,既能保证撑开患者口部,又不会伤割患者口部;
24.呼吸罩上设有进气口,进气口和医用氧气罐通过进气管路及进气电磁控制阀相连通;进气电磁控制阀和plc电控系统电连接;plc电控系统能单独地控制进气控制阀开闭,按照合适的频率给患者供氧气;
25.按压组件包括按压盘和按压气缸;按压气缸的第一端和按压机器人的工作端固定联接;按压气缸的第二端和按压盘固定联接;
26.按压气缸通过电磁方向控制阀和高压气源相连通,电磁方向控制阀和plc电控系统电连接;按压气缸的无杆腔还连接设置了第三可调式减压阀,按压气缸驱动按压盘向下平移时,驱动力保持在与患者的承受力相适应的压力,当驱动力过大时,按压气缸的无杆腔内的压力空气通过第三可调式减压阀排出,使驱动力不能升高太多,一方面防止压伤患者肋骨,另一方面又能保证按压盘下压排出患者肺内空气;
27.人工操纵按压机器人,按压机器人驱动按压气缸和按压盘移动,使按压气缸沿着竖直方向放置,使按压盘位于患者胸部的正上方;按压气缸驱动按压盘向下移动,按压盘按压患者胸部。
28.按压盘按压患者胸部的频率、呼吸罩向患者口部通入氧气的频率都可以通过plc电控系统分别控制,还可以控制在按压盘离开患者胸部时呼吸罩向患者口部通入氧气,在按压时不通氧气。根据患者的病情,编制多个plc程序,每个程序使用不同的按压和通氧气的频率,针对不同的病人调用相适应的程序,工作效率大幅提高。根据患者的体质情况调整第一可调式减压阀、第二可调式减压阀和第三可调式减压阀,使呼吸罩以合适的力量按压患者面部、气动手指以合适的撑紧力撑开患者口部、按压盘以合适的力量按压患者胸部,安全性提高。
29.与现有技术相比,本发明的有益效果是:安全性好,调整方便,工作效率高,自动化、智能化水平高。
附图说明
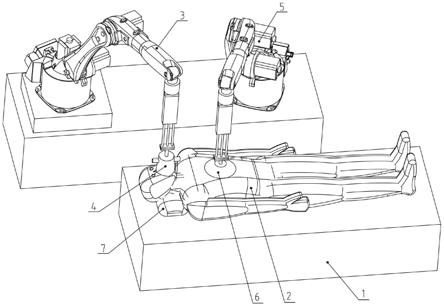
30.图1是本发明实施例的三维结构示意图;
31.图2是呼吸组件4的三维结构示意图;
32.图3是气动手指42和口腔撑指43的组合的三维结构示意图;
33.图4是按压组件6的三维结构示意图;
34.图中:
[0035]1‑
病床;2
‑
人体;3
‑
呼吸机器人;
[0036]4‑
呼吸组件;41
‑
呼吸罩;411
‑
进气口;412
‑
出气口;42
‑
气动手指;43
‑
口腔撑指;431
‑
吸液口;44
‑
呼吸下压气缸;45
‑
第一力传感器;46
‑
联接细杆;
[0037]5‑
按压机器人;
[0038]6‑
按压组件;61
‑
按压盘;62
‑
按压气缸;63
‑
第二力传感器;
[0039]7‑
颈枕。
具体实施方式
[0040]
下面将结合实施例及附图,对本发明中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0041]
如图1
‑
4所述,一种心内科人工呼吸辅助装置,包括病床1、医用氧气罐和机架;
[0042]
还包括呼吸机器人3、呼吸组件4、按压机器人5、按压组件6、plc电控系统、高压气源和医用氧气罐;
[0043]
呼吸机器人3的底座和按压机器人5的底座分别与机架固定联接;
[0044]
如图2所示,呼吸组件4包括呼吸罩41、气动手指42、口腔撑指43、呼吸下压气缸44和联接细杆46;呼吸下压气缸44是带导型的气缸;呼吸下压气缸44的第一端和呼吸机器人3的工作端固定联接;气动手指42是同步摆动夹爪,气动手指42包括气动手指缸体和两个摆动手指,两个摆动手指同步相向或相背摆动;两个口腔撑指43分别和两个摆动手指固定联接;气动手指缸体通过联接细杆46和呼吸下压气缸44的第二端固定联接;呼吸罩41是杯形,呼吸罩41的开口朝下,呼吸罩41把气动手指42和口腔撑指43罩在里面;呼吸罩41的上底面有贯穿的孔,呼吸罩41上底面的孔和联接细杆46密封地固定联接;呼吸罩41的制造材料是柔软且有弹性的工程塑料,比如医用橡胶或者医用硅胶;
[0045]
病人平躺在病床上,人工操纵呼吸机器人3,呼吸机器人3驱动呼吸组件4移动,使呼吸下压气缸44沿着竖直方向放置,使呼吸罩41位于口腔和鼻腔的正上方,人工使患者张开口,呼吸下压气缸44驱动呼吸罩41、气动手指42、口腔撑指43和联接细杆46的组合向下平移,两个口腔撑指43分别伸入患者口腔;因为呼吸罩41是柔软且有弹性的,呼吸罩41可以发生弹性变形,为操作者的手避让开操作活动空间;操作者的手离开后,呼吸罩41的下边缘密封地贴附在患者面部、位于口腔和鼻腔的周围;气动手指42驱动两个口腔撑指43相向离开,使患者保持张开口的状态;
[0046]
呼吸下压气缸44通过电磁方向控制阀和高压气源相连通;呼吸下压气缸44的无杆腔还连接设置了第一可调式减压阀,呼吸下压气缸44驱动呼吸罩41、气动手指42、口腔撑指43和联接细杆46的组合向下平移时,驱动力保持在与患者的承受力相适应的压力,当驱动力过大时,呼吸下压气缸44的无杆腔内的压力空气通过第一可调式减压阀排出,使驱动力不能升高太多,一方面防止压伤患者面部,另一方面又能保证呼吸罩41的下边缘密封地贴附在患者面部;
[0047]
气动手指42还连接设置了第二可调式减压阀,气动手指42驱动两个口腔撑指43相向离开,撑开患者口部,当撑紧力再增大时,通过第二可调式减压阀泄去过大的压力,使撑紧力保持合适的大小,既能保证撑开患者口部,又不会伤割患者口部;
[0048]
呼吸罩41上设有进气口411,进气口411和医用氧气罐通过进气管路及进气电磁控制阀相连通;进气电磁控制阀和plc电控系统电连接;plc电控系统能单独地控制进气控制阀开闭,按照合适的频率给患者供氧气;
[0049]
按压组件6包括按压盘61和按压气缸62;按压气缸62的第一端和按压机器人5的工作端固定联接;按压气缸62的第二端和按压盘61固定联接;
[0050]
按压气缸62通过电磁方向控制阀和高压气源相连通,电磁方向控制阀和plc电控系统电连接;按压气缸62的无杆腔还连接设置了第三可调式减压阀,按压气缸62驱动按压盘61向下平移时,驱动力保持在与患者的承受力相适应的压力,当驱动力过大时,按压气缸62的无杆腔内的压力空气通过第三可调式减压阀排出,使驱动力不能升高太多,一方面防止压伤患者肋骨,另一方面又能保证按压盘61下压排出患者肺内空气;
[0051]
人工操纵按压机器人5,按压机器人5驱动按压气缸62和按压盘61移动,使按压气缸62沿着竖直方向放置,使按压盘61位于患者胸部的正上方;按压气缸62驱动按压盘61向下移动,按压盘61按压患者胸部。
[0052]
按压盘61按压患者胸部的频率、呼吸罩41向患者口部通入氧气的频率都可以通过plc电控系统控制,还可以控制在按压盘61离开患者胸部时呼吸罩41向患者口部通入氧气,根据患者的病情,编制多个plc程序,每个程序使用不同的按压和通氧气的频率。根据患者的体质情况调整第一可调式减压阀、第二可调式减压阀和第三可调式减压阀,使呼吸罩41以合适的力量按压患者面部、气动手指42以合适的撑紧力撑开患者口部、按压盘61以合适的力量按压患者胸部。
[0053]
本实施例可以一边通过人工目测人体口腔的位置和胸腹部的位置,一边操纵呼吸机器人3和按压机器人5,还可以包括视觉传感器,通过视觉传感器自动识别人体口腔的位置和胸腹部的位置,呼吸机器人3和按压机器人5分别自动驱动呼吸组件4和按压组件6移动到目标位置,提高自动化和智能化水平,提高工作效率。
[0054]
口腔撑指43上还设置吸液口431,口腔撑指43内设有通液孔,通液孔通过管路通到口腔外部,可以通过吸液口431把病人口中的口水使用泵抽出,防止流入气管。
[0055]
本实施例还可以包括第一力传感器45,第一力传感器45的第一端与呼吸机器人3的工作端固定联接,第一力传感器45的第二端与呼吸下压气缸44的第一端固定联接。下压气缸44的气路出现故障时有可能失去控制,对外施出太大的力伤害病人,这时第一力传感器45检测到力量太大,向呼吸机器人3发送信号迅速把呼吸组件4向上提起,离开病人,避免伤害。
[0056]
本实施例还可以包括第二力传感器63,第二力传感器63的第一端与按压机器人5的工作端固定联接,第二力传感器63的第二端与按压气缸62的第一端固定联接。按压气缸62的气路出现故障时有可能失去控制,对外施出太大的力伤害病人,这时第二力传感器63检测到力量太大,向按压机器人5发送信号迅速把呼吸组件4向上提起,离开病人,避免伤害。
[0057]
呼吸罩41上还设有出气口412,出气口上设置电磁截止阀,电磁截止阀和plc电控系统电连接,当需要向病人口中输氧时,电磁截止阀关闭,使呼吸罩41形成正压,当病人向外呼气时,电磁截止阀开通,呼吸罩41内的空气通过电磁截止阀排到空气中。
[0058]
本实施例还包括颈枕7,颈枕7放在病人颈下,使病人的下颌抬起,以利于病人的气
管打开。
[0059]
显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1