一种用于踝关节康复训练用的功能性锻炼装置
1.本发明涉及踝关节康复训练技术领域,尤其是涉及一种用于踝关节康复训练用的功能性锻炼装置。
背景技术:
2.在各种踝关节手术术后早期,最重要的两个康复内容就是关节活动度练习和肌肉力量练习,正常的踝关节可以进行各个方向的活动,如背伸、跖屈、内翻和外翻的动作,而目前患者在训练过程中则需要家属或者医护人员进行辅助练习,费时费力,同时,在研究调查过程中,屈膝动作和脚趾的扩展运动都对踝关节的康复起到了积极的作用,而目前的踝关节锻炼装置训练项目比较单一,不能够满足使用需求,为此,我们提出了一种用于踝关节康复训练用的功能性锻炼装置。
技术实现要素:
3.本发明要解决的技术问题是克服现有的缺陷,提供一种用于踝关节康复训练用的功能性锻炼装置,训练方式多样,便于满足使用需求,从而提高了康复的效果,同时,其省去了人力辅助的麻烦,省时省力,可以有效解决背景技术中的问题。
4.为了实现所述发明目的,本发明采用如下技术方案:一种用于踝关节康复训练用的功能性锻炼装置,包括底盘、前后移动机构和电机座;底盘:底部安装有移动机构,所述底盘上分别安装有安装座驱动单元、电源和plc控制器,plc控制器的侧面安装有无线收发器,所述底盘的顶部通过回转支承转动连接有安装座,安装座驱动单元用于驱动安装座进行转动;前后移动机构:安装在安装座的顶部,所述前后移动机构的活动部位通过滑动机构与安装座活动连接;电机座:上安装有翻转训练单元,翻转训练单元部位固定在滑动机构的滑动部位顶部,所述电机座的侧面固定有传动架,传动架的端部通过导向机构与滑动机构的滑动部位顶部连接,所述滑动机构的滑动部位侧面通过伸展训练单元连接有脚托,脚托上分别设有约束固定单元和脚趾训练单元;其中,所述无线收发器和电源均电性连接plc控制器。
5.进一步的,所述移动机构包括万向轮和脚刹,万向轮安装在底盘的底部,所述万向轮上装配有脚刹。
6.进一步的,所述安装座驱动单元包括第一伺服电机、蜗杆和蜗轮,第一伺服电机安装在底盘的顶部,所述蜗杆固定在第一伺服电机的输出轴上,蜗轮固定在安装座的底部,且蜗杆与蜗轮之间啮合传动,所述第一伺服电机电性连接plc控制器。
7.进一步的,所述滑动机构包括滑槽和滑动座,滑槽开设在安装座的顶部,所述滑动座与滑槽滑动连接。
8.进一步的,所述前后移动机构包括第二伺服电机、丝杆和传动螺母,第二伺服电机安装在安装座的顶部,所述丝杆固定在第二伺服电机的输出轴上,传动螺母固定在滑动座上且与丝杆螺纹连接,所述第二伺服电机电性连接plc控制器。
9.进一步的,所述翻转训练单元包括齿条、齿轮和步进电机,步进电机安装在电机座的侧面,所述齿轮固定在步进电机的输出轴上,齿条固定在滑动座的顶部,所述齿条为弧形结构,齿条与齿轮之间啮合传动,所述步进电机电性连接plc控制器。
10.进一步的,所述导向机构包括导轨和滑块,导轨为弧形结构且固定在滑动座的顶部,所述滑块固定在传动架的端部且与导轨滑动连接。
11.进一步的,所述伸展训练单元包括铰支座、电动推杆和铰链,电动推杆的安装端通过铰支座与滑块铰接,所述电动推杆的伸缩端通过铰链与脚托的底部铰接,电动推杆电性连接plc控制器。
12.进一步的,所述脚趾训练单元包括气泵、气管和气囊柱,气泵安装在脚托的底部,所述气囊柱分布在脚托上对应人体脚趾缝隙的位置,气囊柱通过气管与气泵连通,所述气泵电性连接plc控制器。
13.进一步的,所述约束固定单元包括束缚带和松紧扣,束缚带的端部通过松紧扣与脚托连接。
14.与现有技术相比,本发明的有益效果是:本用于踝关节康复训练用的功能性锻炼装置,具有以下好处:通过安装座驱动单元带动安装座与底盘进行相对转动,从而可以使患者的膝盖进行回转训练,通过前后移动机构使脚托可以带动脚部进行前后移动,从而来进行屈膝训练,通过翻转训练单元使脚托带动脚部进行左右翻转,从而对踝关节进行左右翻转训练,通过伸展训练单元使脚托进行前后转动,从而使踝关节进行背伸训练,通过脚趾训练单元对脚趾进行扩展运动,从而对脚部进行训练,其训练方式多样,便于满足使用需求,从而提高了康复的效果,同时,其省去了人力辅助的麻烦,省时省力。
附图说明
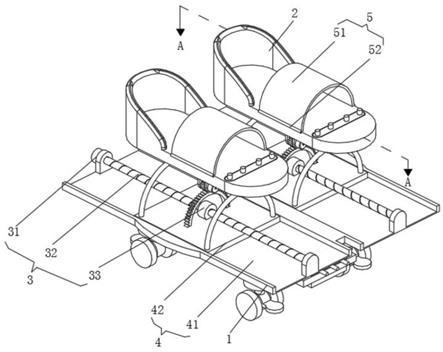
15.图1为本发明的立体结构示意图;图2为本发明的立体底部结构示意图;图3为本发明的a-a处结构剖面图;图4为本发明的安装座驱动单元结构示意图。
16.图中:1安装座、2脚托、3前后移动机构、31第二伺服电机、32丝杆、33传动螺母、4滑动机构、41滑槽、42滑动座、5约束固定单元、51束缚带、52松紧扣、6移动机构、61万向轮、62脚刹、7脚趾训练单元、71气泵、72气管、73气囊柱、8伸展训练单元、81铰支座、82电动推杆、83铰链、9翻转训练单元、91齿条、92齿轮、93步进电机、10导向机构、101导轨、102滑块、11安装座驱动单元、1101第一伺服电机、1102蜗杆、1103蜗轮、12底盘、13电源、14 plc控制器、15无线收发器、16电机座、17回转支承、18传动架。
具体实施方式
17.通过下面的实施例可以详细地解释本发明,公开本发明的目的旨在保护本发明范围内的一切技术改进。
18.请参阅图1-4,本实施例提供一种技术方案:一种用于踝关节康复训练用的功能性锻炼装置,包括底盘12、前后移动机构3和电机座16;底盘12:底部安装有移动机构6,底盘12上分别安装有安装座驱动单元11、电源13和plc控制器14,plc控制器14的侧面安装有无线收发器15,底盘12的顶部通过回转支承17转动连接有安装座1,安装座驱动单元11用于驱动安装座1进行转动;前后移动机构3:安装在安装座1的顶部,前后移动机构3的活动部位通过滑动机构4与安装座1活动连接;电机座16:上安装有翻转训练单元9,翻转训练单元9部位固定在滑动机构4的滑动部位顶部,电机座16的侧面固定有传动架18,传动架18的端部通过导向机构10与滑动机构4的滑动部位顶部连接,滑动机构4的滑动部位侧面通过伸展训练单元8连接有脚托2,脚托2上分别设有约束固定单元5和脚趾训练单元7;其中,无线收发器15和电源13均电性连接plc控制器14。
19.plc控制器14可以通过无线收发器15与遥控设备进行信息交互,其控制方便,便于使用。
20.移动机构6包括万向轮61和脚刹62,万向轮61安装在底盘12的底部,万向轮61上装配有脚刹62,通过万向轮61将底盘12移动到需要的区域,然后,通过脚刹62对万向轮61进行制动,其移动方便,便于使用。
21.安装座驱动单元11包括第一伺服电机1101、蜗杆1102和蜗轮1103,第一伺服电机1101安装在底盘12的顶部,蜗杆1102固定在第一伺服电机1101的输出轴上,蜗轮1103固定在安装座1的底部,且蜗杆1102与蜗轮1103之间啮合传动,第一伺服电机1101电性连接plc控制器14,第一伺服电机1101的输出轴带动蜗杆1102转动,蜗杆1102与蜗轮1103之间啮合传动,蜗轮1103带动安装座1与底盘12进行相对转动,从而可以使患者的膝盖进行回转训练,其训练效果好,便于满足使用需求。
22.滑动机构4包括滑槽41和滑动座42,滑槽41开设在安装座1的顶部,滑动座42与滑槽41滑动连接,滑动座42沿着滑槽41进行前后滑动,从而保证了脚托2在前后移动过程中的稳定性。
23.前后移动机构3包括第二伺服电机31、丝杆32和传动螺母33,第二伺服电机31安装在安装座1的顶部,丝杆32固定在第二伺服电机31的输出轴上,传动螺母33固定在滑动座42上且与丝杆32螺纹连接,第二伺服电机31电性连接plc控制器14,第二伺服电机31的输出轴带动丝杆32转动,丝杆32与传动螺母33螺纹传动,传动螺母33带动滑动座42沿着滑槽41进行前后滑动,从而使脚托2可以带动脚部进行前后移动,从而来进行屈膝训练,通过屈膝训练来辅助踝关节进行康复,从而提高了踝关节康复的效果。
24.翻转训练单元9包括齿条91、齿轮92和步进电机93,步进电机93安装在电机座16的侧面,齿轮92固定在步进电机93的输出轴上,齿条91固定在滑动座42的顶部,齿条91为弧形结构,齿条91与齿轮92之间啮合传动,步进电机93电性连接plc控制器14,步进电机93的输出轴带动齿轮92转动,齿轮92与齿条91啮合传动,从而使脚托2带动脚部进行左右翻转,从而对踝关节进行左右翻转训练,其训练方式多样,便于满足使用需求,从而提高了康复的效果,同时,其省去了人力辅助的麻烦,省时省力。
25.导向机构10包括导轨101和滑块102,导轨101为弧形结构且固定在滑动座42的顶
部,滑块102固定在传动架18的端部且与导轨101滑动连接,电机座16通过传动架18带动滑块102沿着导轨101滑动,从而使脚托2带动脚部进行左右翻转,从而保证了脚托2在翻转过程中的稳定性。
26.伸展训练单元8包括铰支座81、电动推杆82和铰链83,电动推杆82的安装端通过铰支座81与滑块102铰接,电动推杆82的伸缩端通过铰链83与脚托2的底部铰接,电动推杆82电性连接plc控制器14,电动推杆82的伸缩端进行伸长或缩短,从而使铰支座81与滑块102之间以及铰链83与脚托2之间进行相对转动,从而使脚托2进行前后转动,从而使踝关节进行背伸训练,其训练效果好,便于满足使用需求。
27.脚趾训练单元7包括气泵71、气管72和气囊柱73,气泵71安装在脚托2的底部,气囊柱73分布在脚托2上对应人体脚趾缝隙的位置,气囊柱73通过气管72与气泵71连通,气泵71电性连接plc控制器14,气泵71通过气管72对气囊柱73进行充放气,气囊柱73对脚趾进行扩展运动,从而对脚部进行训练,通过辅助训练提高了踝关节康复的效果。
28.约束固定单元5包括束缚带51和松紧扣52,束缚带51的端部通过松紧扣52与脚托2连接,将脚放置在脚托2上,通过束缚带51对前脚背进行束缚,通过松紧扣52来调节束缚带51的束缚松紧度,保证了设计的合理性。
29.本发明提供的一种用于踝关节康复训练用的功能性锻炼装置的工作原理如下:通过万向轮61将底盘12移动到需要的区域,然后,通过脚刹62对万向轮61进行制动,将脚放置在脚托2上,通过束缚带51对前脚背进行束缚,通过松紧扣52来调节束缚带51的束缚松紧度,第一伺服电机1101的输出轴带动蜗杆1102转动,蜗杆1102与蜗轮1103之间啮合传动,蜗轮1103带动安装座1与底盘12进行相对转动,从而可以使患者的膝盖进行回转训练,第二伺服电机31的输出轴带动丝杆32转动,丝杆32与传动螺母33螺纹传动,传动螺母33带动滑动座42沿着滑槽41进行前后滑动,从而使脚托2可以带动脚部进行前后移动,从而来进行屈膝训练,步进电机93的输出轴带动齿轮92转动,齿轮92与齿条91啮合传动,同时,电机座16通过传动架18带动滑块102沿着导轨101滑动,从而使脚托2带动脚部进行左右翻转,从而对踝关节进行左右翻转训练,电动推杆82的伸缩端进行伸长或缩短,从而使铰支座81与滑块102之间以及铰链83与脚托2之间进行相对转动,从而使脚托2进行前后转动,从而使踝关节进行背伸训练,气泵71通过气管72对气囊柱73进行充放气,气囊柱73对脚趾进行扩展运动,从而对脚部进行训练,plc控制器14用于对第一伺服电机1101、第二伺服电机31、步进电机93、电动推杆82和气泵71进行控制,plc控制器14可以通过无线收发器15与遥控设备进行信息交互。
30.值得注意的是,以上实施例中所公开的第一伺服电机1101、第二伺服电机31、步进电机93、电动推杆82和气泵71均根据实际应用场景进行选型配置,plc控制器14控制第一伺服电机1101、第二伺服电机31、步进电机93、电动推杆82和气泵71均采用现有技术中常用的方法,plc控制器14型号选用松下fp3系列,无线收发器15选用zigbee模块wlt2408sz。
31.本发明未详述部分为现有技术,尽管结合优选实施方案具体展示和介绍了本发明,具体实现该技术方案方法和途径很多,以上所述仅是本发明的优选实施方式,但所属领域的技术人员应该明白,在不脱离所附权利要求书所限定的本发明的精神和范围内,在形式上和细节上可以对本发明做出各种变化,均为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1