利用惯性传感器计算关节力矩和角度的步态分析系统及方法
1.本发明属于智能穿戴设备领域,具体涉及一种利用惯性传感器计算关节力矩和角度的步态分析系统及方法。
背景技术:
2.步行是人类最基本的运动。步行的姿态可以分为很多种,通过分析步行时的受力情况,人体姿态等相关运动学数据,可以分析人体步态特征、影响步态的各种因素。用于分析步态的设备被称为步态分析系统,研制一种精确且高效的步态分析系统在医疗、体育、航空航天等多个方面均具有重大意义。
3.步态分析系统能够获取人体在各体态和运动下的生理、病理的力学和数学参数,进行人体各部位和机能检测,所检测的数据经进一步分析计算后可获得人体各部位的受力状态、以及机械功、代谢能量消耗的情况。在医疗方面,可以用来评估患者是否存在异常步态以及步态异常的性质和程度,为分析异常步态原因和矫正异常步态、制订治疗方案提供必要的依据,在临床医学方面意义重大。在体育方面,可用于运动中的训练记录分析和评价,是分析动作,提高成绩的定量依据,也可以通过分析穿戴不同运动装备时的数据,进行运动装备的设计与研发。在动作损伤防护方面,可以用于捕捉人体易发损伤动作的运动学数据,结合力学、解剖学分析,明确损伤发生的机制,了解可能造成损伤的因素,提出有效的防护方法。
4.现在常用的步态分析方法需要使用红外摄像头捕捉运动学数据和测力台采集地面反作用力数据。但是,此传统分析方法有较多缺陷,通过运动捕获系统获取人体运动学数据需要多个红外摄像头,因此成本较高。另一方面,作为获取地反力数据的重要设备,测力板价格昂贵且难以移动,无法实现长期持续监测,限制了适用范围,因此迫切需要开发一种便携式的步态分析系统。
5.针对目前步态分析方法的缺陷,市面上出现了一些便携式步态分析系统,但一些系统可获得的关节角度精度低,一些则无法测量关节力矩,不能全面地满足步态分析的需要。
技术实现要素:
6.本发明的目的在于提供一种利用惯性传感器计算关节力矩和角度的步态分析系统及方法。
7.实现本发明目的的技术解决方案为:一种利用惯性传感器计算关节力矩和角度的步态分析系统,包括佩戴于被试者身上的惯性传感器和计算单元;所述惯性传感器用于测量加速度和陀螺仪数据,所述计算单元利用深度学习网络,计算得出关节角度、地反力和关节力矩。
8.进一步的,所述惯性传感器设置在被试者腿部和脚踝上,根据测量出的角速度与加速度信号,通过卡尔曼滤波器计算得到关节角度。
9.进一步的,所述深度学习网络训练后,下载至手持终端。
10.进一步的,系统还包括基站和上位机;数个惯性传感器佩戴于人体相应部位,惯性传感器将加速度信号和陀螺仪信号通过wifi或蓝牙发送给基站,基站再传送给上位机;上位机通过接收到的数据,计算得出关节角度、地反力和关节力矩。
11.一种利用惯性传感器计算关节力矩和角度的步态分析方法,包括:
12.利用佩戴于被试者身上的惯性传感器测量加速度和陀螺仪数据;
13.通过深度学习网络,计算得出关节角度、地反力和关节力矩。
14.与现有技术相比,本发明的显著优点为:本发明通过佩戴于被试者身上的惯性传感器得到数据,利用深度神经网络等技术,可以实时计算地面反作用力、关节角度与关节力矩等步态信息,同时具有低成本、高精度、便携、高效等多方面优势,能方便分析被试者的步态特征、开展运动评估、指导运动训练,因此在医疗康复、生物力学、运动科学等领域具有较好的应用前景和经济效益。
附图说明
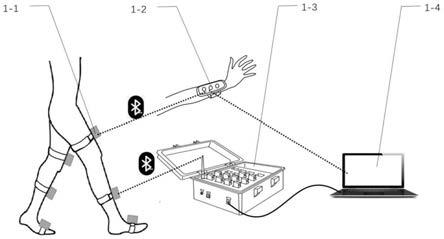
15.图1为发明的可穿戴步态分析系统总体示意图。
16.图2为手持设备人机交互界面示例图。
17.图3为测量膝关节角度的计算方法示意图。
18.图4为采用卡尔曼滤波的关节角测量系统的框图。
19.图5为加速度拟合地反力的流程图。
20.图6为关节力矩求解流程图。
21.图7为总体算法流程图。
具体实施方式
22.本发明提供一种利用惯性传感器计算关节力矩和角度的步态分析系统及方法,系统主要能实现以下三个功能:利用惯性传感器计算关节角度、利用加速度拟合地反力、利用牛顿-欧拉法进行动力学建模计算关节力矩。
23.本发明利用惯性传感器,采用卡尔曼滤波方式计算关节角度。首先,从腿部和脚踝处的imu惯性测量单元处获得角速度和加速度信号,通过对陀螺仪角速度差进行积分计算关节角度,接着用卡尔曼滤波器根据陀螺仪获得的角度与加速度计获得的角度之间的差异,估计陀螺仪测量的关节角度误差。最后,关节角度的估计值为陀螺仪获得的角度与卡尔曼滤波器估算的角度误差的和。
24.本发明先对初始数据进行主成成分分析(pca),降低维数,再采用多层感知器(mlp)对降维后的数据进行参数训练,形成从加速度到地反力的一个映射,从而实现加速度拟合地反力。首先输入加速度数据,对其进行主成成分分析,降低维度,降低预测中的噪声,并作为mlp的输入,并利用测量得到的地反力数据与模型的输出进行对比。然后构建mlp神经网络模型,将数据集划分为训练集和测试集,训练集用于模型学习,测试集用于评估模型的预测能力,最终建立mlp模型,并输出预测的地反力。
25.本发明利用牛顿-欧拉法来计算关节力矩。首先,将人体抽象为一个上肢简化的刚性连杆模型,包括七个节段。根据中国成年人人体惯性参数建立回归方程,求解简化的的7
杆模型中各刚性杆件的质量、质心位置以及通过质心位置的转动惯量。接着,利用修改dh参数法得出连杆旋转矩阵,并对各刚性杆件进行受力分析确定末端连杆的外力及外力矩。最后,利用牛顿-欧拉迭代法计算出关节力矩。
26.下面结合附图,对本发明具体实施方式做进一步的说明。
27.结合图1,本发明提供一种新的步态分析系统,包括惯性传感器1-1,手持终端1-2、基站1-3和上位机1-4,其中惯性传感器用于测量加速度和陀螺仪数据,手持终端可以接收数据、处理数据和导出数据。基站为存放惯性传感器、对惯性传感器进行充电和接收传感器数据的地方,还可以和上位机相连,将接收到的数据直接传送到上位机。上位机可以通过接收到的数据,计算得出关节角度、地反力和关节力矩,并训练得到深度学习模型,可将模型下载到手持设备使用。
28.本发明有两种测量方式。
29.方式一是利用基站和上位机,在测量时,将数个惯性传感器佩戴于人体相应部位,惯性传感器可以将加速度信号和陀螺仪信号通过wifi或蓝牙发送给基站,基站再通过数据线传送给上位机。此时,可以在上位机上计算出关节角度,利用lstm、cnn、mlp等算法拟合地反力,并计算得到关节力矩。
30.方式二是只利用手持设备和惯性传感器。此方式需要事先在上位机建立模型并导入到手持设备。在测量时,将数个惯性传感器佩戴于人体相应部位,惯性传感器可以将加速度信号和陀螺仪信号通过wifi或蓝牙直接发送给手持设备,手持设备则可以直接利用深度学习网络计算得到结果。该方式使得即使在户外也能轻松得到关节角度、地反力和关节力矩。
31.手持设备主要构成部件为外壳、显示屏、cpu、gpu、内存、固态存储、蓝牙接收器、电池等等。显示屏可以显示人机交互界面并实现按键输入,如图2所示,右上角为主要控制区域,包括以下按键:开始/停止、导出数据、开始记录、停止记录和紧急停止按钮。手持设备最多可以进行三种计算:关节角度、地反力和关节力矩,也可以通过取消勾选来只进行其中一种或两种数据的计算。
32.如图7所示,本发明还提供一种基于上述分析系统的步态分析方法,利用佩戴于被试者身上的惯性传感器测量加速度和陀螺仪数据;通过深度学习网络,计算得出关节角度、地反力和关节力矩。
33.下面对三种数据计算过程进行详细的描述:
34.(一)基于惯性传感器的关节角度计算:
35.基于惯性传感器的关节角度计算方法需要被试者在腿部和脚踝上捆绑含有惯性测量单元的可穿戴传感器,利用惯性传感器测量出的角速度与加速度信号,通过卡尔曼滤波器计算得到关节角度。
36.计算一个关节角度需要两个惯性传感器,分别附着在被测关节的两端上,则此关节角度的计算方法为两个陀螺仪测量角速度差的积分。以膝关节为例,测量膝关节角度的计算方法如图3(a)所示,膝关节角度计算公式为:
37.θ
膝盖
=∫(ω
大腿-ω
小腿
)dt+θ0ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
38.其中,ω
大腿
和ω
小腿
分别表示测量得到的大腿和小腿的角速度,θ0表示用加速度计测量得到的初始关节角度,即:
39.θ0=θ
大腿0-θ
小腿0
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)θ
大腿0
和θ
小腿0
分别表示大腿和小腿的初始倾角,等价于测量重力加速度倾角,如图3(b)所示,计算公式为:
[0040][0041]
图4为采用卡尔曼滤波的关节角度测量系统的框图。θ和θ
′
分别是用陀螺仪和加速度计测量的关节角度。θ为利用角速度差积分计算得到的关节角度,如公式(1)所示。θ
′
由各段重力加速度倾角的差值计算,如公式(3)所示。加速度计数据需要通过截止频率为0.5hz的巴特沃斯低通滤波器滤波,以减小加速度数据的波动。然后,卡尔曼滤波器根据陀螺仪获得的角度与加速度计获得的角度之间的差异δy,估计陀螺仪测量的关节角度误差。最后,关节角度的估计值为θ与的和。
[0042]
系统的状态表示为使用陀螺仪测量的关节角度误差δθ和一个采样周期的偏置增量δb。即状态方程为:
[0043][0044]
式中,u为陀螺仪测量误差。
[0045]
观测方程为:
[0046][0047]
式中,v为加速度计测量的误差。
[0048]
卡尔曼滤波重复修正(6)和预测(7)如下:
[0049][0050][0051]
其中k1和k2分别为δθ和δb的卡尔曼增益,为关节角度误差δθ预测值的估计值,为偏置增量δb预测值的估计值,
“‑”
代表预测值,“^”代表估计值。初始状态时,设为零,设为上次测量时的值。
[0052]
(二)利用加速度拟合地反力
[0053]
如图5所示,利用加速度拟合地反力主要分两个步骤,一是对初始加速度数据数据进行pca,降低数据维度,降低预测中的噪声。二是构建mlp神经网络模型,训练模型参数并进行测试。
[0054]
pca的计算流程如下:设有n个样本,每个样本有p个属性,原始矩阵为:
[0055][0056]
式中xi=[x
1i x
2i
...x
np
]
t
,i=1,2,...,p.
[0057]
对x1,x2,...,x
p
进行线性组合如下:
[0058][0059]
上述方程要求:i=1,2,...,p,同时要求fi与fj相互独立,i≠j,i,j=1,2,...,p,按照方差大小排序,f1最大,f2次大,依此类推;其中a
ij
为对应的xi的系数;
[0060]
求解a
ij
,就是寻找a
t
x(a=a1,a2,...,a
p
)
t
使得相应的方差最大,且满足a
t
a=1,即:
[0061]
var(a
t
x)=a
t
∑a
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(10)
[0062]
式中,∑是协方差矩阵。
[0063]
然后对协方差矩阵求特征值λ1≥λ2≥...≥λ
p
>0以及相应的单位特征向量。最后通过计算第i个主成分对总方差的贡献率来确定各个主成分对原数据集的解释能力。实际降维通常取累计贡献率到达85%
‑‑
95%,即降维后信息损失不大。
[0064]
mlp由多层神经元模型相互连接而成,每一个节点为一个神经元模型,神经元之间的协作关系是由每层之间的神经元相互连接的权值和阈值确定的。所以网络模型的学习过程就是根据实际输出结果和标准输出结果之间的误差函数不断改变节点之间的权值和阈值,使误差函数的值达到最小值的过程。
[0065]
建立mlp网络模型主要分为3个步骤,第一步建立模型,建立输入层,多个隐藏层和输出层,其中输入层维度是数据pca处理后保留的属性维度,隐藏层为复杂的数学计算,即计算每个神经元的权值,是系统的核心部分。第二步是通过训练集训练模型参数,将数据集划分为训练集和测试集,训练集用于模型学习,测试集用于评估模型的预测能力。第三步是进行模型测试的实验。运用优化算法再次训练mlp模型,并将测试集的数据输入,经训练过的算法之后得到地反力预测值,与实际值对比进行性能评价,反复测试最终得到mlp网络模型。
[0066]
运用pca和该mlp网络模型就可以利用加速度可获得地反力。
[0067]
(三)基于牛顿-欧拉法建立动力学模型求解关节力矩
[0068]
如图6所示,本发明将人体抽象成上半身简化的刚性连杆模型。其中,将人体整个上肢简化为单一的刚性杆件,将下肢任意相邻的两个关节之间的部分看作一个刚体,两个刚体之间由关节相连。下肢的刚性杆件包括:人体左侧大腿、左侧小腿、左足、右侧大腿、右侧小腿、右足。
[0069]
在实验过程中,人体各个肢体段的长度可以直接测量,本发明不做过多说明。但涉及到肢体段质心的相关参数无法确定。本发明参考中国成年人人体惯性参数的回归方程系数建立如下所示的回归方程:
[0070]
c=b0+b1x1+b2x2+b3x3+
…ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0071]
其中,bi参考gb/t 17245-2004《中国成年人人体惯性参数》;x1为体重,x2为身高,x3为头颈长;据此求解出人体简化模型的各刚性杆件的质量、质心位置以及通过质心位置在额状面的转动惯量。
[0072]
为了描述各个关节的相对位置,在每一个关节处建立局部坐标系。建立的原则遵循以下两个方面:
[0073]
1)将脚掌设定为基座坐标系,踝关节处两轴交于一点,将交点作为两个局部坐标系的原点;同理,髋关节处三轴交于一点,将这个交点作为三个局部坐标系的原点。
[0074]
2)zi为第i个空间坐标系z轴,都是沿轴i的方向,x
i-1
垂直于zi与z
i-1
所形成的平面,yi的方向由右手定则确定。
[0075]
接下来,为了简化连杆模型,本发明采用改进dh参数法表达连杆之间的相对关系。
[0076]
得到变化矩阵:
[0077][0078]
其中,s表示sin运算,c表示cos运算,α
i-1
表示沿着x
i-1
轴,从z
i-1
移动到zi的距离;α
i-1
表示绕着x
i-1
轴,从z
i-1
旋转到zi的角度;di表示沿着zi轴,从x
i-1
移动到xi的距离;θi表示绕着zi轴,从x
i-1
旋转到xi的角度;
[0079]
在已知人体简化后的刚性连杆模型的质心、刚性杆件质量、质心位置转动惯量后,采用牛顿-欧拉法建立方程,最终求解关节力矩。
[0080]
牛顿-欧拉法基于两个基本方程,即力平衡方程及力矩平衡方程:
[0081]
fc=macꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(13)
[0082]
nc=ic·
α+ω
×
(ic·
ω)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(14)其中,fc表示作用于机械臂质心处的合力,ac表示机械臂质心的线加速度,nc表示作用于机械臂质心处的合力矩,ic表示相对机械臂质心表示的机械臂惯量矩阵,α表示机械臂角的加速度,ω表示机械臂角的角速度;
[0083]
首先,对各个节段进行受力分析:
[0084]
(1)足部分析
[0085]
足部分别受到地反力、重力以及小腿对足部的作用力。其中,重力竖直向下;地面对足部的作用力包括竖直方向的支撑力和水平方向的摩擦力,支撑力方向竖直向上,摩擦力方向向后;小腿对足部也包括水平方向和竖直方向的作用力及力矩。
[0086]
(2)腿部分析
[0087]
腿部受力分析包括小腿和大腿部分。并且两者有着相似的受力情况。小腿部位受到重力、足部通过踝关节对小腿的作用力及力矩、大腿通过膝关节对小腿的作用力及力矩。
大腿部位受到重力、小腿通过膝关节对大腿的作用力及力矩、上肢通过髋关节对大腿的作用力及力矩。
[0088]
(3)上肢分析
[0089]
上肢受到左右侧大腿通过各自侧髋关节对上肢的作用力及力矩。
[0090]
其次,进牛顿-欧拉迭代法建模:
[0091]
牛顿-欧拉法分两步,首先向外迭代,计算出各个杆件的角速度、角加速度、质心线加速度,进而求解出每个连杆的合外力;然后,向内迭代,计算出每个连杆的内力,进而得出关节力矩。
[0092]
迭代公式如下:
[0093]
向外迭代:
[0094][0095]
向内迭代:
[0096][0097]
其中表示第i与第i+1坐标系之间的姿态转换矩阵,ip
i+1
表示第i与第i+1坐标原点间的距离向量,
i+1zi+1
表示i+1关节的轴向方向,表示关节的角速度,表示关节的角加速度,其他符号含义同前,其中左上标代表参数在哪个坐标系,右下标代表参数所属的机械臂;τi表示第i关节的驱动力矩,ini表示第i个机械臂关节处的合力。
[0098]
最后,迭代过程如下:
[0099]
向外迭代:利用修改的dh模型提取旋转矩阵并求逆,结合向外迭代公式进行求解,计算出各个杆件的角速度、角加速度、质心线加速度,进而求解出每个连杆的合外力;
[0100]
向内迭代:分析施加在末端连杆的外力以及外力矩,作为输入,结合牛顿-欧拉法向内迭代公式,计算出每个连杆的内力,进而得出关节力矩。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1