血管腔内介入手术机器人的导丝导管控制及力反馈装置的制作方法
本发明涉及医疗装备,具体地,涉及一种血管腔内介入手术机器人的导丝导管控制及力反馈装置。
背景技术:
1、血管腔内技术已经成为血管治疗的基本手段,目前实施的多数血管重建手术都需借助这项技术。导丝-导管的操作是血管腔内技术的核心内容,决定着手术质量。目前,临床中医生借助数字剪影血管造影成像技术(dsa)手动完成导丝-导管在病人血管内的定位操作。常规被动导丝、指引导管、球囊导管是手术中使用的基本器械。使用机器人装置进行导丝(导管或其他器械)定位操作,有利于提高定位操作精度、降低医生疲劳度、改善手术质量。
2、力反馈技术一直是制约血管腔内介入手术机器人推向广泛临床应用的重要因素。血管介入手术机器人系统中的力反馈技术是指在使用机器人从端进行导丝定位推送过程中,将导丝在血管内运动时所受到的阻力反馈给机器人的操作者,使其能够同步感受到导丝在血管腔内所处状态。现有血管腔内介入手术导丝推送力测量技术方案存在导丝与力传感器之间存在多级传动,推送力在传导过程中损失严重,造成推送力测量分辨率不足,细节信息丢失,且多级传动过程中,机械振动容易将较大噪声混入测量过程的问题。
3、经现有技术检索发现,中国发明专利公告号为cn208693445u,公开了一种血管腔内介入手术机器人导丝/导管操作扭矩检测装置,属于医疗装备制造技术领域,所述扭矩检测装置上设有的用于实现导丝/导管扭转操作的传动齿轮,传动齿轮的内圆周面上固定连接有弹簧圈;所述弹簧圈由同心的外圈和内圈通过四个弹簧片连接组成,四个弹簧片沿弹簧圈周向均匀分布,形成十字形结构,四个电阻应变片分别固定在四个弹簧片上,且四个电阻应变片连接为全桥电路,所述全桥电路通过导电滑环与外部的输出信号电路连接。该专利技术就存在上述相关问题。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种血管腔内介入手术机器人的导丝导管控制及力反馈装置。
2、根据本发明提供的一种血管腔内介入手术机器人的导丝导管控制及力反馈装置,所述控制及力反馈装置固定设置在所述操作台上,所述控制及力反馈装置包括操纵柄组件、轴向阻力反馈组件以及开关组件;
3、所述操纵柄组件包括手柄棒、直线导轨以及带座轴承,所述直线导轨设置在所述操作台上,所述带座轴承套设在所述手柄棒上,且所述带座轴承通过滑块滑动设置在所述直线导轨上,所述手柄棒端部设有用于监测所述手柄棒旋转状态的控制旋转器;
4、所述开关组件通过固定底板设置在所述带座轴承上,所述开关组件包括开关手柄和输出控制执行手夹紧、松开信号的微动开关,所述开关手柄端部设有拨动板,所述拨动板随所述开关手柄的转动而按压所述微动开关;
5、所述轴向阻力反馈组件包括定子件、动子件以及输出作用力数值的力传感器,所述定子件设置在所述操作台上,所述动子件设置在所述定子件上,所述力传感器对应设置在所述定子件的一侧。
6、一些实施方式中,所述定子件两端分别固定有左感应片和右感应片,所述左感应片对应设置在所述左硬限位,所述右感应片对应设置在所述右硬限位,所述左硬限位和所述右硬限位分别设置在所述操作台上,所述定子件下方设有光栅尺,所述光栅尺上对应设有读数头。
7、一些实施方式中,所述操作台上开设有v型槽,所述限位块通过球头弹性柱塞对应v型槽设置,且所述限位块设置在所述定子件下方;所述左硬限位一侧设有所述左光电开关,所述右硬限位一侧设有所述右光电开关。
8、一些实施方式中,所述控制及力反馈装置还包括用于传感器和电机的供电、信号传输的控制器,所述控制器分别与所述操纵柄组件、所述轴向阻力反馈组件、所述开关组件连接设置。
9、一些实施方式中,所述开关组件一侧固定设置坦克链,所述坦克链另一端固定设置在所述操作台上。
10、一些实施方式中,所述开关组件还包括压缩弹簧和销轴,所述拨动板绕所述销轴转动设置,所述压缩弹簧设置在所述拨动板与上固定板之间。
11、一些实施方式中,所述操纵柄组件还包括压力传感器,所述压力传感器环绕所述手柄棒设置,所述手柄棒上套设有滑环,所述滑环上旋转设置在所述手柄棒上,所述带座轴承与所述控制旋转器之间通过连接板连接设置。
12、一些实施方式中,所述控制及力反馈装置设有两组,两组所述控制及力反馈装置旋转对称分布在所述操作台上。
13、一些实施方式中,所述控制旋转器采用编码器。
14、一些实施方式中,所述控制旋转器采用带扭矩传感器电机组件。
15、与现有技术相比,本发明具有如下的有益效果:
16、1、本发明通过设置操纵柄组件,通过设置压力传感器和控制旋转器,实现手柄棒的推拉和旋转动作,并设置开关组件,可单手实现进退扭转及夹子开合的控制,简单方便;
17、2、本发明通过设置编码器作为控制旋转器,当手柄棒旋转时,编码器可检测其旋转角度及方向;也可以设置带扭矩传感器的伺服电机组件作为控制旋转器,用以提供扭转方向的力反馈功能;
18、3、本发明通过设置操纵柄组件和轴向阻力反馈组件,通过操纵柄组件实现旋转方向控制及该方向力反馈的结构保护,通过轴向阻力反馈组件实现轴向控制及该方向力反馈的结构保护;
19、4、本发明通过在操作台上旋转对称分布设置控制及力反馈装置,医生可以方便的通过两套轴向阻力反馈组件操纵前端的两个机械手独立动作。
技术特征:
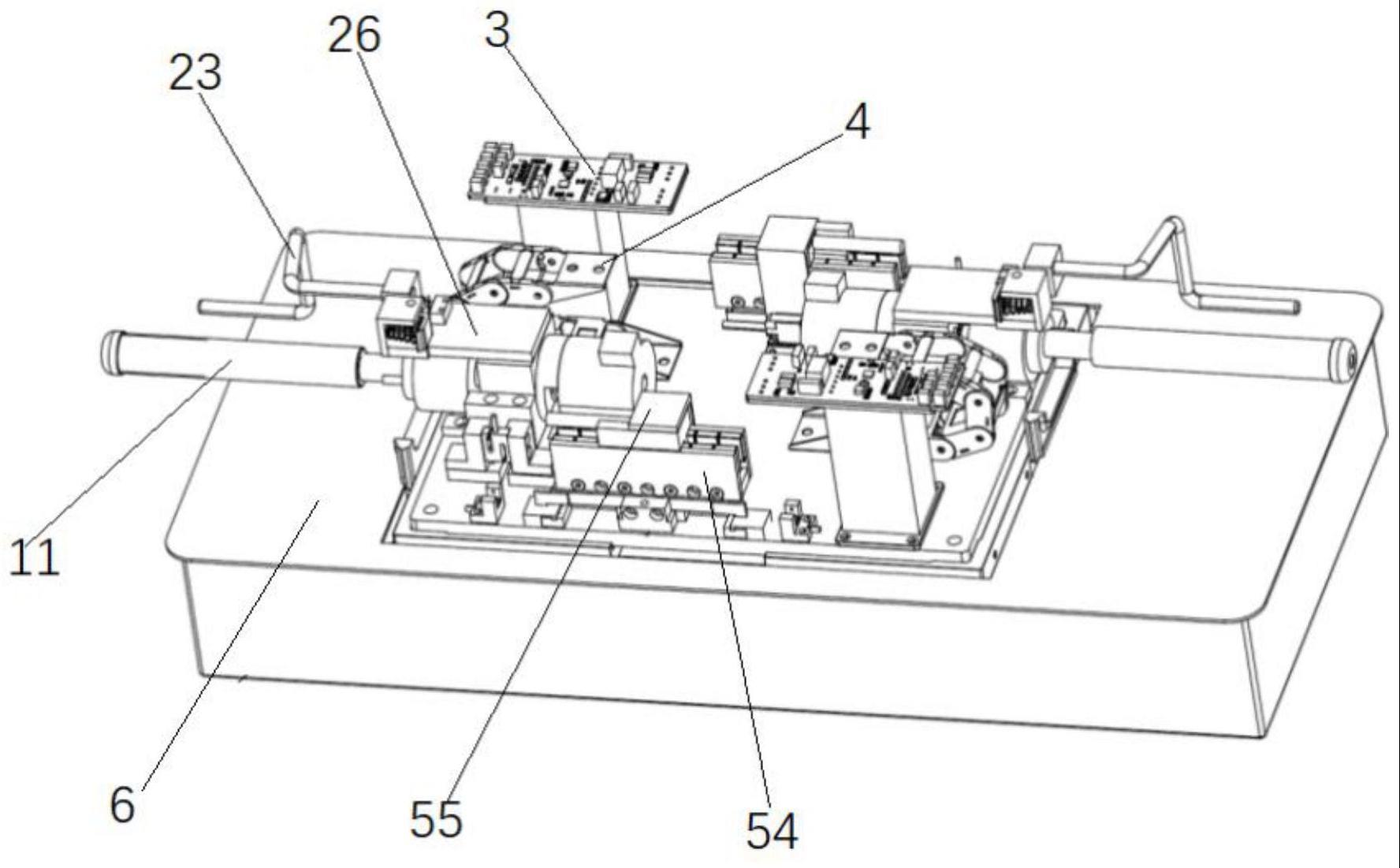
1.一种血管腔内介入手术机器人的导丝导管控制及力反馈装置,所述控制及力反馈装置固定设置在所述操作台(6)上,其特征在于,所述控制及力反馈装置包括操纵柄组件(1)、轴向阻力反馈组件(5)以及开关组件(2);
2.根据权利要求1所述的血管腔内介入手术机器人的导丝导管控制及力反馈装置,其特征在于,所述定子件(54)两端分别固定有左感应片(60)和右感应片(57),所述左感应片(60)对应设置在所述左硬限位(61),所述右感应片(57)对应设置在所述右硬限位(58),所述左硬限位(61)和所述右硬限位(58)分别设置在所述操作台(6)上,所述定子件(54)下方设有光栅尺(63),所述光栅尺(63)上对应设有读数头(64)。
3.根据权利要求2所述的血管腔内介入手术机器人的导丝导管控制及力反馈装置,其特征在于,所述操作台(6)上开设有v型槽,所述限位块(59)通过球头弹性柱塞(66)对应v型槽设置,且所述限位块(59)设置在所述定子件(54)下方;所述左硬限位(61)一侧设有所述左光电开关(62),所述右硬限位(58)一侧设有所述右光电开关(56)。
4.根据权利要求1所述的血管腔内介入手术机器人的导丝导管控制及力反馈装置,其特征在于,所述控制及力反馈装置还包括用于传感器和电机的供电、信号传输的控制器(3),所述控制器(3)分别与所述操纵柄组件(1)、所述轴向阻力反馈组件(5)、所述开关组件(2)连接设置。
5.根据权利要求1所述的血管腔内介入手术机器人的导丝导管控制及力反馈装置,其特征在于,所述开关组件(2)一侧固定设置坦克链(4),所述坦克链(4)另一端固定设置在所述操作台(6)上。
6.根据权利要求1所述的血管腔内介入手术机器人的导丝导管控制及力反馈装置,其特征在于,所述开关组件(2)还包括压缩弹簧(21)和销轴(27),所述拨动板(24)绕所述销轴(27)转动设置,所述压缩弹簧(21)设置在所述拨动板(24)与上固定板(22)之间。
7.根据权利要求1所述的血管腔内介入手术机器人的导丝导管控制及力反馈装置,其特征在于,所述操纵柄组件(1)还包括压力传感器(52)(12),所述压力传感器(52)(12)环绕所述手柄棒(11)设置,所述手柄棒(11)上套设有滑环(13),所述滑环(13)上旋转设置在所述手柄棒(11)上,所述带座轴承(16)与所述控制旋转器(18)之间通过连接板(17)连接设置。
8.根据权利要求1所述的血管腔内介入手术机器人的导丝导管控制及力反馈装置,其特征在于,所述控制及力反馈装置设有两组,两组所述控制及力反馈装置旋转对称分布在所述操作台(6)上。
9.根据权利要求1所述的血管腔内介入手术机器人的导丝导管控制及力反馈装置,其特征在于,所述控制旋转器(18)采用编码器。
10.根据权利要求1所述的血管腔内介入手术机器人的导丝导管控制及力反馈装置,其特征在于,所述控制旋转器(18)采用带扭矩传感器电机组件。
技术总结
本发明提供了医疗装备技术领域的一种血管腔内介入手术机器人的导丝导管控制及力反馈装置,控制及力反馈装置固定设置在操作台上,控制及力反馈装置包括操纵柄组件、轴向阻力反馈组件、开关组件;操纵柄组件包括手柄棒、直线导轨、带座轴承,直线导轨设置在操作台上,带座轴承套设在手柄棒上,且带座轴承通过滑块滑动设置在直线导轨上,手柄棒端部设有控制旋转器;开关组件通过固定底板设置在带座轴承上,开关组件包括开关手柄和微动开关,开关手柄端部设有拨动板;轴向阻力反馈组件包括定子件、动子件、力传感器,定子件设置在操作台上,动子件设置在定子件上,力传感器对应设置在定子件的一侧。本发明实现手柄棒的推拉和旋转动作,简单方便。
技术研发人员:肖卫平,钱磊,刘道志,刘奕琨
受保护的技术使用者:上海奥朋医疗科技有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!