一种用于呼吸机的通气压力控制系统及控制方法与流程
1.本发明属于医疗设备的通气压力控制技术领域,具体地说,涉及一种用于呼吸机的通气压力控制系统及控制方法。
背景技术:
2.呼吸机是一种用于救治呼吸衰竭患者的不可缺少的医疗设备,现代的呼吸机主要以正压通气呼吸机为主,正压通气呼吸机具有各种各样的正压通气模式,以适应不同患者人群和特定呼吸疾病的需求。其中,正压通气模式按其控制变量分,包括:容量控制模式和压力控制模式;其中,容量控制模式(vc)下,呼吸机控制每次呼吸的潮气量(或吸气流量);压力控制模式(pc)下,呼吸机控制每次呼吸的吸气压力;还有一种双目标控制模式,是以调节吸气压力的方式,保证潮气量的送入,因此,称之为压力调节的容量控制模式(prvc)。压力控制模式较之于容量控制模式而言,更能满足舒适和安全通气的需求。
3.如图1所示,压力控制模式下,建立以时间t为横坐标,以压力p为纵坐标的变化曲线,一次通气分为吸气相和呼气相两个过程,吸气相的控制变量有吸气压力ip和吸气时间it,呼气相的控制变量有呼气压力ep和呼气时间et。吸气压力高于呼气末压力,因此,吸气时,气体可以进入患者气道;呼气压力低于吸气末压力,因此,呼气时,气体可以排出患者气道。另外,还有一个控制变量,就是吸气压力上升时间rt,rt的设置范围通常在0~2000ms。当rt≠0时,气道压力在吸气开始后,并不是马上达到吸气压力ip,而是在呼气压力ep的基础上,缓慢提升到吸气压力ip,大部分的呼吸机中,将这段吸气开始段称为吸气压力上升斜坡。具体的吸气压力上升斜坡的形式因呼吸机的品牌差异而有区别,有的呼吸机指明其压力上升轨迹是按指数形式,有的呼吸机指明其压力上升轨迹是直线形式,也有的呼吸机压根就模糊其含义。
4.吸气压力上升斜坡的控制具有明确的临床意义,即尽量提高患者的吸气舒适度,降低患者的吸气自主做功。但是,由于患者的吸气舒适度是一种主观的指标,无法准确监测,患者的吸气做功也很难监测和量化评估,因此,在临床上医师一般都是通过医师自身经验设置吸气压力上升时间。
5.目前,市面上的呼吸机未能明确吸气压力上升和呼气压力下降的形式,也不允许用户选择不同的吸气压力上升轨迹和呼气压力下降轨迹,以及不允许用户选择呼气压力下降速率。
6.另外,现有的呼吸机只有固定的压力上升速率和轨迹,或压力下降速率和轨迹,不能适应个性化的临床用户和需求,并且不受控的呼气压力释放速率会增加呼吸机导致的肺损伤的风险。
技术实现要素:
7.为解决现有技术存在的上述缺陷,本发明提出了一种用于呼吸机的通气压力控制系统,该系统与呼吸机通信连接,该系统包括:气路供给装置、客户端、通气控制器和外部监
测器;
8.气路供给装置通过通气管路输出所需要的呼吸的氧气或空气流;通气控制器与气路供给装置通信连接,外部监测器与通气控制器通信连接,客户端与通气控制器通信连接;
9.所述客户端,用于在用户操作界面上选择压力上升轨迹或压力下降轨迹的不同压力控制模式的氧气或空气流;
10.所述通气控制器,用于将客户端发送的压力上升轨迹的压力控制模式,或压力下降轨迹的压力控制模式,作为目标轨迹;接收的实时采集的实际输出压力,并将其作为通气压力控制器的反馈值,并和目标轨迹中的目标压力,得到压力误差,通气控制器对压力误差进行控制,使其在10%以内,实现实际输出压力对目标压力的实时跟踪,完成对气路供给装置进行实时的闭环反馈轨迹跟踪控制,继而得到压力控制量和压力误差控制量,形成对应的控制指令,并将对应的控制指令发送至气路供给装置;根据目标轨迹中所需要的氧气或空气流,得到对应的氧气或空气流控制量,成对应的控制指令,并将对应的控制指令发送至气路供给装置;
11.还用于根据接收的监测数据,实时调整压力控制量、氧气或空气流控制量和压力误差控制量;其中,所述监测数据包括输入呼吸机的压力、氧气或空气流流量,以及压力误差;
12.所述气路供给装置,用于根据通气控制器发送的控制指令,输出压力上升轨迹或压力下降轨迹的不同压力控制模式的氧气或空气流;
13.所述外部监测器,用于实时监测输入呼吸机的监测数据,并将其输入至通气控制器。
14.作为上述技术方案的改进之一,所述气路供给装置包括:供气源、吸气控制器、呼气控制器、流量传感器和压力传感器;
15.所述供气源,用于提供氧气或空气流;
16.所述吸气控制器,用于根据通气控制器发送的控制指令,控制输入呼吸机的吸气阶段的氧气或空气流流量和压力,从而输出各种压力控制模式下的不同压力上升轨迹;其中,控制指令包括:压力控制指令、压力误差控制指令和流量控制指令;
17.所述呼气控制器,用于根据通气控制器发送的控制指令,控制输入呼吸机的呼气阶段的氧气或空气流流量和压力,从而输出各种压力控制模式下的不同压力下降轨迹;
18.所述流量传感器包括:吸气流量传感器和呼气流量传感器;
19.所述吸气流量传感器,用于实时采集输入呼吸机的吸气阶段的氧气或空气流流量,并将其发送至吸气控制器;
20.所述呼气流量传感器,用于实时采集输入呼吸机的呼气阶段的氧气或空气流流量,并将其发送至吸气控制器;
21.所述压力传感器,用于实时采集呼吸机的实际输出压力,并将其发送至通气控制器。
22.作为上述技术方案的改进之一,所述供气源为外部高压气源或内置的空气压缩泵。
23.作为上述技术方案的改进之一,所述吸气控制器为涡轮、活塞或比例阀。
24.作为上述技术方案的改进之一,所述呼气控制器为涡轮或呼气阀。
25.作为上述技术方案的改进之一,所述通气控制器包括:前馈控制器、反馈控制器、流量控制器和监测控制器;
26.所述前馈控制器,用于将客户端发送的压力控制模式的压力上升轨迹,或压力控制模式的压力下降轨迹,作为目标轨迹,根据预先设定的目标轨迹与呼吸机输出的实际压力之间的映射关系,得到对应的压力控制量,继而形成对应的压力控制指令,再将其发送至吸气控制器或呼气控制器;
27.所述反馈控制器,用于根据接收的实时采集的实际输出压力,并将其作为通气压力控制器的反馈值,并和目标轨迹中的目标压力,得到压力误差,通气控制器对压力误差进行控制,使其在10%以内,实现实际输出压力对目标压力的实时跟踪,完成对气路供给装置进行实时的闭环反馈轨迹跟踪控制,继而得到压力误差控制量,通气控制器对压力误差进行控制,使其在10%以内,形成对应的压力误差控制指令,再将其发送至吸气控制器或呼气控制器;
28.所述流量控制器,用于根据接收的实时采集供气源提供的氧气或空气流流量,以及目标轨迹所需要的氧气或空气流量,并以二者的误差得到氧气或空气流控制量,形成对应的流量控制指令,再将其发送至呼气控制器或吸气控制器;
29.所述监测控制器,用于根据接收的监测数据,实时调整压力控制量、氧气或空气流控制量和压力误差控制量;其中,所述监测数据包括输入呼吸机的压力、氧气或空气流流量,以及压力误差。
30.作为上述技术方案的改进之一,所述压力上升轨迹的各种压力控制模式包括:指数形式的压力上升轨迹、正弦形式的压力上升轨迹、直线形式的压力上升轨迹和s型形式的压力上升轨迹;
31.其中,指数形式的压力上升轨迹p1(t):
32.p1(t)=ep+δp1×
(1-e-t
×
4/rt
)t∈(0,rt)
33.其中,t表示吸气开始的通气过渡时间,每次吸气开始的通气过渡时间清零;rt表示吸气压力上升时间;δp1为针对p1(t)的吸呼气压力差;ep为呼气压力;
34.正弦形式的压力上升轨迹p2(t):
35.p2(t)=ep+δp2×
sin(π/(2
×
rt)
×
t)t∈(0,rt)
36.其中,δp2为针对p2(t)的吸呼气压力差;
37.直线形式的压力上升轨迹p3(t):
38.p3(t)=ep+δp3/rt
×
t t∈(0,rt)
39.其中,δp3为针对p3(t)的吸呼气压力差;
40.s型形式的压力上升轨迹p4(t):
41.p4(t)=ep+3
×
δp4×
t2/rt
2-2
×
δp4×
t3/rt
3 t∈(0,rt)
42.其中,δp4为针对p4(t)的吸呼气压力差。
43.作为上述技术方案的改进之一,所述压力下降轨迹的各种压力控制模式包括:指数形式的压力下降轨迹、正弦形式的压力下降轨迹、直线形式的压力下降轨迹和s型形式的压力下降轨迹;
44.其中,指数形式的压力下降轨迹p5(t1):
45.p5(t1)=ip-δp5×
(1-e-t1
×
4/dt
)t1∈(0,dt)
46.其中,δp5为针对p5(t1)的吸呼气压力差;ip为吸气压力;dt为呼气压力上升时间;t1为呼气开始的通气过渡时间,每次呼气开始的通气过渡时间清零;
47.正弦形式的压力下降轨迹p5(t1):
48.p6(t1)=ip-δp6×
sin(π/(2
×
dt)
×
t1)t1∈(0,dt)
49.其中,δp6为针对p6(t1)的吸呼气压力差;
50.直线形式的压力下降轨迹:
51.p7(t1)=ip-δp7/dt
×
t1 t1∈(0,dt)
52.其中,δp7为针对p7(t1)的吸呼气压力差;
53.s型形式的压力下降轨迹
54.p8(t1)=ip-3
×
δp8×
t12/dt2+2
×
δp8×
t13/dt
3 t1∈(0,dt)
55.其中,δp8为针对p8(t1)的吸呼气压力差。
56.本发明还提供了一种用于呼吸机的通气压力控制方法,该方法包括:
57.客户端在用户操作界面上选择压力上升轨迹的不同压力控制模式的氧气或空气流;
58.通气控制器将客户端发送的压力上升轨迹的压力控制模式,作为目标轨迹;接收的实时采集的实际输出压力,并将其作为通气压力控制器的反馈值,并和目标轨迹中的目标压力,得到压力误差,通气控制器对压力误差进行控制,使其在10%以内,实现实际输出压力对目标压力的实时跟踪,完成对气路供给装置进行实时的闭环反馈轨迹跟踪控制,继而得到压力控制量和压力误差控制量,形成对应的控制指令,并将对应的控制指令发送至气路供给装置;根据目标轨迹中所需要的氧气或空气流,得到对应的氧气或空气流控制量,成对应的控制指令,并将对应的控制指令发送至气路供给装置;
59.气路供给装置根据通气控制器发送的控制指令,输出压力上升轨迹的不同压力控制模式的氧气或空气流;
60.客户端在用户操作界面上选择压力下降轨迹的不同压力控制模式;
61.通气控制器将客户端发送的压力下降轨迹的压力控制模式,作为目标轨迹;接收的实时采集的实际输出压力,并将其作为通气压力控制器的反馈值,并和目标轨迹中的目标压力,得到压力误差,通气控制器对压力误差进行控制,使其在10%以内,实现实际输出压力对目标压力的实时跟踪,完成对气路供给装置进行实时的闭环反馈轨迹跟踪控制,继而得到压力控制量和压力误差控制量,形成对应的控制指令,并将对应的控制指令发送至气路供给装置;根据目标轨迹中所需要的氧气或空气流,得到对应的氧气或空气流控制量,成对应的控制指令,并将对应的控制指令发送至气路供给装置;
62.气路供给装置根据通气控制器发送的控制指令,输出压力下降轨迹的不同压力控制模式的氧气或空气流。
63.本发明与现有技术相比的有益效果是:
64.1、本发明的方法通过闭环控制器,实现用户设定的通气压力上升轨迹或下降轨迹的跟踪控制;
65.2、该方法可以实现控制吸气压力上升的多种速率和设置不同压力上升轨迹,以及设置吸气压力上升时间;其中,吸气压力上升轨迹包括:上升指数形式、上升正弦形式、上升直线形式和上升s型函数形式的四种上升轨迹;同时,该方法还可以实现控制呼气压力下降
的多种速率和设置不同的压力下降轨迹,以及设置呼气压力下降时间;其中,呼气压力下降轨迹包括:下降指数形式、下降正弦形式、下降直线形式和下降s型函数形式,使呼吸机能更适应多种临床需求,并且提升用户体验;
66.3、本发明的方法能够提供和缓的压力下降,可以提高气道平均压力,提高氧合效果,还可对治呼气气流受限,因此,大大提高二氧化碳清除效果,进而解决二氧化碳清除效果差的问题;
67.4、本发明的方法能够大大缩短通气时间,促进患者快速脱机。
附图说明
68.图1是现有技术的通气压力控制模式下的以时间为横坐标,以压力为纵坐标的曲线示意图;
69.图2是本发明的一种用于呼吸机的通气压力控制系统的不同轨迹下的不同压力控制模式的曲线示意图;
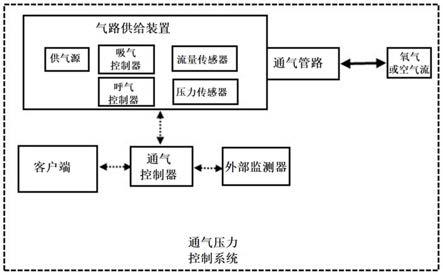
70.图3是本发明的一种用于呼吸机的通气压力控制系统的结构示意图;
71.图4是本发明的一种用于呼吸机的通气压力控制系统的客户端的示意图;
72.图5是本发明的一种用于呼吸机的通气压力控制系统的通气控制器的结构示意图。
具体实施方式
73.现结合附图和实例对本发明作进一步的描述。
74.如图3和4所示,本发明提供了一种用于呼吸机的通气压力控制系统,该系统与呼吸机通信连接,该系统包括:气路供给装置、客户端、通气控制器和外部监测器;
75.气路供给装置通过通气管路输出所需要的呼吸的氧气或空气流;通气控制器与气路供给装置通信连接,外部监测器与通气控制器通信连接,客户端与通气控制器通信连接;
76.所述客户端,用于在用户操作界面上选择压力上升轨迹或压力下降轨迹的不同压力控制模式的氧气或空气流;
77.所述通气控制器,用于将客户端发送的压力上升轨迹的压力控制模式,或压力下降轨迹的压力控制模式,作为目标轨迹;接收的实时采集的实际输出压力,并将其作为通气压力控制器的反馈值,并和目标轨迹中的目标压力,得到压力误差,通气控制器对压力误差进行控制,使其在10%以内,实现实际输出压力对目标压力的实时跟踪,完成对气路供给装置进行实时的闭环反馈轨迹跟踪控制,继而得到压力控制量和压力误差控制量,形成对应的控制指令,并将对应的控制指令发送至气路供给装置;根据目标轨迹中所需要的氧气或空气流,得到对应的氧气或空气流控制量,成对应的控制指令,并将对应的控制指令发送至气路供给装置;
78.还用于根据接收的监测数据,实时调整压力控制量、氧气或空气流控制量和压力误差控制量;其中,所述监测数据包括输入呼吸机的压力、氧气或空气流流量,以及压力误差;
79.具体地,如图5所示,所述通气控制器包括:前馈控制器、反馈控制器、流量控制器和监测控制器;
80.所述前馈控制器,用于将客户端发送的压力控制模式的压力上升轨迹,或压力控制模式的压力下降轨迹,作为目标轨迹,根据预先设定的目标轨迹与呼吸机输出的实际压力之间的映射关系,得到对应的压力控制量,继而形成对应的压力控制指令,再将其发送至吸气控制器或呼气控制器;
81.所述反馈控制器,用于根据接收的实时采集的实际输出压力,并将其作为通气压力控制器的反馈值,并和目标轨迹中的目标压力,得到压力误差,通气控制器对压力误差进行控制,使其在10%以内,实现实际输出压力对目标压力的实时跟踪,完成对气路供给装置进行实时的闭环反馈轨迹跟踪控制,继而得到压力误差控制量,通气控制器对压力误差进行控制,使其在10%以内,形成对应的压力误差控制指令,再将其发送至吸气控制器或呼气控制器;
82.所述流量控制器,用于根据接收的实时采集供气源提供的氧气或空气流流量,以及目标轨迹所需要的氧气或空气流量,并以二者的误差得到氧气或空气流控制量,形成对应的流量控制指令,再将其发送至呼气控制器或吸气控制器;
83.所述监测控制器,用于根据接收的监测数据,实时调整压力控制量、氧气或空气流控制量和压力误差控制量;其中,所述监测数据包括输入呼吸机的压力、氧气或空气流流量,以及压力误差。
84.其中,如图2所示,所述压力上升轨迹的各种压力控制模式包括:指数形式的压力上升轨迹、正弦形式的压力上升轨迹、直线形式的压力上升轨迹和s型形式的压力上升轨迹;
85.其中,指数形式的压力上升轨迹p1(t):
86.p1(t)=ep+δp1×
(1-e-t
×
4/rt
)t∈(0,rt)
87.其中,t表示吸气开始的通气过渡时间,每次吸气开始的通气过渡时间清零;rt表示吸气压力上升时间;δp1为针对p1(t)的吸呼气压力差;ep为呼气压力;
88.正弦形式的压力上升轨迹p2(t):
89.p2(t)=ep+δp2×
sin(π/(2
×
rt)
×
t)t∈(0,rt)
90.其中,δp2为针对p2(t)的吸呼气压力差;
91.直线形式的压力上升轨迹p3(t):
92.p3(t)=ep+δp3/rt
×
t t∈(0,rt)
93.其中,δp3为针对p3(t)的吸呼气压力差;
94.s型形式的压力上升轨迹p4(t):
95.p4(t)=ep+3
×
δp4×
t2/rt
2-2
×
δp4×
t3/rt
3 t∈(0,rt)
96.其中,δp4为针对p4(t)的吸呼气压力差。
97.其中,如图2所示,所述压力下降轨迹的各种压力控制模式包括:指数形式的压力下降轨迹、正弦形式的压力下降轨迹、直线形式的压力下降轨迹和s型形式的压力下降轨迹;
98.其中,指数形式的压力下降轨迹p5(t1):
99.p5(t1)=ip-δp5×
(1-e-t1
×
4/dt
)t1∈(0,dt)
100.其中,δp5为针对p5(t1)的吸呼气压力差;ip为吸气压力;dt为呼气压力上升时间;t1为呼气开始的通气过渡时间,每次呼气开始的通气过渡时间清零;
101.正弦形式的压力下降轨迹p5(t1):
102.p6(t1)=ip-δp6×
sin(π/(2
×
dt)
×
t1)t1∈(0,dt)
103.其中,δp6为针对p6(t1)的吸呼气压力差;
104.直线形式的压力下降轨迹:
105.p7(t1)=ip-δp7/dt
×
t1 t1∈(0,dt)
106.其中,δp7为针对p7(t1)的吸呼气压力差;
107.s型形式的压力下降轨迹
108.p8(t1)=ip-3
×
δp8×
t12/dt2+2
×
δp8×
t13/dt
3 t1∈(0,dt)
109.其中,δp8为针对p8(t1)的吸呼气压力差。
110.其中,指数形式的压力过渡具有开始变化极快后期变化极慢的特点,可以适应吸气需求急迫和呼气需求急迫的患者,此种形式也是目前呼吸机中采用的最多的一种压力过渡轨迹。
111.正弦形式和指数形式的压力变化特点相近,但初始变化稍慢,因此同样过渡时间的设置下,可以防止初始的压力过冲和控制抖动。
112.直线形式较为常见,压力匀速变化和适中,可以适用于绝大多数患者人群。
113.s型形式为三次样条曲线,相当和缓,因此可以用于那些对通气舒适度要求较高的患者。
114.因此,可以说,即使在相同的上升(或下降)时间的情况下,循着各种形式的轨迹其控制出来的通气效果也有细微的差异,因此能够适应各式各样机械通气患者人群的个性化需求。
115.所述气路供给装置,用于根据通气控制器发送的控制指令,输出压力上升轨迹或压力下降轨迹的不同压力控制模式的氧气或空气流;
116.具体地,如图3所示,所述气路供给装置包括:供气源、吸气控制器、呼气控制器、流量传感器和压力传感器;
117.所述供气源,用于提供氧气或空气流;
118.所述吸气控制器,用于根据通气控制器发送的控制指令,控制输入呼吸机的吸气阶段的氧气或空气流流量和压力,从而输出各种压力控制模式下的不同压力上升轨迹;其中,控制指令包括:压力控制指令、压力误差控制指令和流量控制指令;
119.所述呼气控制器,用于根据通气控制器发送的控制指令,控制输入呼吸机的呼气阶段的氧气或空气流流量和压力,从而输出各种压力控制模式下的不同压力下降轨迹;
120.所述流量传感器包括:吸气流量传感器和呼气流量传感器;
121.所述吸气流量传感器,用于实时采集输入呼吸机的吸气阶段的氧气或空气流流量,并将其发送至吸气控制器;
122.所述呼气流量传感器,用于实时采集输入呼吸机的呼气阶段的氧气或空气流流量,并将其发送至吸气控制器;
123.所述压力传感器,用于实时采集呼吸机的实际输出压力,并将其发送至通气控制器。
124.其中,所述供气源为外部高压气源或内置的空气压缩泵。
125.所述吸气控制器为涡轮、活塞或比例阀。
126.所述呼气控制器为涡轮或呼气阀。
127.所述外部监测器,用于实时监测输入呼吸机的监测数据,并将其输入至通气控制器。
128.本发明还提供了一种用于呼吸机的通气压力控制方法,该方法包括:
129.客户端在用户操作界面上选择压力上升轨迹的不同压力控制模式的氧气或空气流;
130.通气控制器将客户端发送的压力上升轨迹的压力控制模式,作为目标轨迹;接收的实时采集的实际输出压力,并将其作为通气压力控制器的反馈值,并和目标轨迹中的目标压力,得到压力误差,通气控制器对压力误差进行控制,使其在10%以内,实现实际输出压力对目标压力的实时跟踪,完成对气路供给装置进行实时的闭环反馈轨迹跟踪控制,继而得到压力控制量和压力误差控制量,形成对应的控制指令,并将对应的控制指令发送至气路供给装置;根据目标轨迹中所需要的氧气或空气流,得到对应的氧气或空气流控制量,成对应的控制指令,并将对应的控制指令发送至气路供给装置;
131.气路供给装置根据通气控制器发送的控制指令,输出压力上升轨迹的不同压力控制模式的氧气或空气流;
132.客户端在用户操作界面上选择压力下降轨迹的不同压力控制模式;
133.通气控制器将客户端发送的压力下降轨迹的压力控制模式,作为目标轨迹;接收的实时采集的实际输出压力,并将其作为通气压力控制器的反馈值,并和目标轨迹中的目标压力,得到压力误差,通气控制器对压力误差进行控制,使其在10%以内,实现实际输出压力对目标压力的实时跟踪,完成对气路供给装置进行实时的闭环反馈轨迹跟踪控制,继而得到压力控制量和压力误差控制量,形成对应的控制指令,并将对应的控制指令发送至气路供给装置;根据目标轨迹中所需要的氧气或空气流,得到对应的氧气或空气流控制量,成对应的控制指令,并将对应的控制指令发送至气路供给装置;
134.气路供给装置根据通气控制器发送的控制指令,输出压力下降轨迹的不同压力控制模式的氧气或空气流。
135.最后所应说明的是,以上实施例仅用以说明本发明的技术方案而非限制。尽管参照实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,对本发明的技术方案进行修改或者等同替换,都不脱离本发明技术方案的精神和范围,其均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1