一种手功能镜像康复装置
1.本发明涉及手部外骨骼康复机器人领域,尤其是涉及一种手功能镜像康复装置。
背景技术:
2.卒中是我国成年人致死和致残的首位病因。近70%的幸存者会发生不同程度的偏瘫,丧失单侧运动能力。医学研究表明,康复训练能够部分或完全恢复患者的肢体运动能力。临床中对手部运动障碍患者的康复治疗大多采用医师和患者一对一的方式进行,然而,我国目前的康复医师在数量和熟练度上远远满足不了实际临床康复治疗的需求。
3.多数手功能康复装置的辅助康复训练过程,是根据康复医师设定的固定参数值进行训练。在不同的恢复阶段如果仍然按照固定参数值进行训练,不仅对病人的恢复不利,并且很大可能给患者带来二次伤害。
4.因此,本发明针对现有手功能康复装置存在的技术不足,提出了一种手功能镜像康复装置。
技术实现要素:
5.本发明针对现有手功能康复装置存在的技术不足,提出了一种手功能镜像康复装置;可以通过健侧手运动镜像控制患侧手随动,患者能够自主控制康复力量和手势,使康复过程更加安全、有效。
6.为了实现上述目的,本发明采用了如下技术方案:
7.一种手功能镜像康复装置,包括:康复训练手套、数据手套和控制装置;
8.其中,所述康复训练手套的指套背部分别安装五条薄膜弯曲传感器,所述薄膜弯曲传感器通过数据线与所述控制装置连接;所述薄膜弯曲传感器上方均安装充气可弯曲的气动肌肉,所述气动肌肉贴近手套侧安装有伸长限制层,所述气动肌肉指尖端封闭,另一端均连接至空气软管中;所述空气软管连接至所述控制装置。
9.所述数据手套的指套背部分别安装有五条片式弯曲传感器,所述片式弯曲传感器通过信号线与所述控制装置可插拔电性连接;
10.所述控制装置根据所述片式弯曲传感器与所述薄膜弯曲传感器的相对位置,控制所述空气软管充气或放气。
11.经由上述的技术方案可知,与现有技术相比,本发明通过使用片式弯曲传感器识别数据手套每个手指的角度与姿态。当手指弯曲时,片式弯曲传感器整体也发生弯曲,其内部裂纹变大,导电率变小,整体的电阻增大。电信号通过信号线传输至控制装置,控制装置将电信号进行校正、滤波、数据融合和姿态解算,识别出健侧手运动轨迹,进而控制空气软管进行充气,使康复训练手套上的气动肌肉弯曲,通过康复训练手套的指套背部的薄膜弯曲传感器对患侧手运动轨迹实时反馈,最终控制康复训练手套进行同步的运动轨迹。
12.优选的,在上述一种手功能镜像康复装置中,所述气动肌肉贴近手套侧安装有伸长限制层,伸长限制层采用碳纤维布。本发明通过粘接剂将碳纤维布安装在气动肌肉贴近
手套侧,固定该侧长度。当充入气体时,另一侧膨胀伸长,实现弯曲。
13.优选的,在上述一种手功能镜像康复装置中,所述薄膜弯曲传感器粘贴于所述康复训练手套指套背部。
14.优选的,在上述一种手功能镜像康复装置中,所述片式弯曲传感器缝合在所述数据手套指套背部。
15.采用本发明的技术设计方案,与现有技术相比,具有如下有益效果:
16.1.本发明的一种手功能镜像康复装置与传统被动康复训练方式不同,由患者主动利用健侧手的手势和力度控制患侧手的康复,充分调动了患者的主观康复积极性。
17.2.手功能康复装置用于辅助手部运动障碍的患者进行康复时,除了实现位置控制外,还需考虑机器人与患者间的力耦合关系,以保障患者的舒适性,因此对柔顺性和安全性要求较高。传统采用电机或液压等刚性驱动器进行驱动的手功能康复装置结构复杂且柔顺性差。本发明的一种手功能镜像康复装置与传统刚性驱动器驱动的康复装置不同,采用的是气动肌肉作为驱动器。气动肌肉作为一种仿生柔性驱动器,可以模拟人体肌肉的运动形式,具有驱动能力强、柔顺性好、功率质量比大等优势,可增加康复机器人的穿戴舒适性和使用安全性。
附图说明
18.图1为气动肌肉充气前的示意图。
19.图2为气动肌肉充气后的示意图。
20.图3为康复训练手套的侧视图。
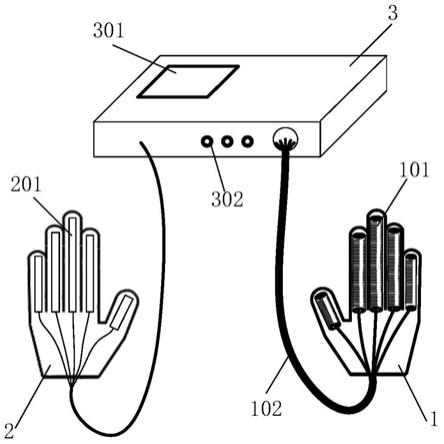
21.图4为本发明的结构示意图。
22.图5为控制装置原理框图。
23.图6为本发明的控制算法框图。
24.附图标号说明:康复训练手套-1、气动肌肉-101、空气软管-102、伸长限制层-103、薄膜弯曲传感器-104、数据手套-2、片式弯曲传感器-201、控制装置-3、显示屏-301、按键-302、电源-303、mcu控制器-304、气泵-305、电磁阀-306。
具体实施方式
25.下面将结合本发明实施例中的附图进行描述,以使本发明的优点和特征更易于被本领域的技术人员理解,从而对本发明的保护范围作出更为清楚明确的界定。需要特别注意的是,在以下的描述中,当已知功能和设计的详细描述也许会淡化本发明的主要内容时,这些描述在这里将被忽略。
26.如图1-4所示,本发明公开了一种手功能镜像康复装置,包括康复训练手套1、数据手套2和控制装置3;
27.其中,所述康复训练手套1的指套背部分别安装五条薄膜弯曲传感器104,所述薄膜弯曲传感器104通过数据线与所述控制装置3连接;所述薄膜弯曲传感器104上方均安装充气可弯曲的气动肌肉101,所述气动肌肉101贴近手套侧安装有伸长限制层103,所述气动肌肉指尖端封闭,另一端均连接至空气软管102中;所述空气软管102连接至所述控制装置3。
28.所述数据手套2的指套背部分别安装有五条片式弯曲传感器201,所述片式弯曲传感器201通过信号线与所述控制装置3可插拔电性连接;
29.所述控制装置3根据所述片式弯曲传感器201与所述薄膜弯曲传感器104的相对位置,控制所述空气软管102充气或放气。
30.参看图1,所述气动肌肉充气前为一个中空的椭圆形的腔式,其底部粘贴着伸长限制层,其主要作用是限制气动肌肉底部的伸长。
31.参看图2,对中空的气动肌肉充入气体后,由于整个材料是柔性的,气动肌肉会向各个方向膨胀,由于气动肌肉贴近手套侧伸长限制层的存在,气动肌肉会发生弯曲形变。
32.参看图3,所述康复训练手套1包括气动肌肉101、空气软管102、伸长限制层103和薄膜弯曲传感器104;当气动肌肉101充入气体时,发生弯曲形变,从而带动康复训练手套1弯曲,薄膜弯曲传感器104感知弯曲角度,实现反馈控制。
33.参看图4,数据手套2的指套背部分别安装有五条片式弯曲传感器201,所述片式弯曲传感器201通过信号线与所述控制装置3可插拔电性连接;当数据手套2手势改变时,对应指套背部的片式弯曲传感器201发生弯曲形变,导电率变小,整体的电阻增大,在角度0至180度之间,其电阻阻值变化区间为12k至20k;电阻阻值的变化引起信号线内电流的变化,mcu控制器304接收变化的电流信号,控制气泵305的启停和相应电磁阀306的通断;气泵305和电磁阀306通过空气软管102将气体充入康复训练手套1的相应气动肌肉101中;薄膜弯曲传感器104感知康复训练手套1的弯曲角度,通过信号线传输至mcu控制器304,mcu控制器304通过片式弯曲传感器201与所述薄膜弯曲传感器104的相对位置,控制康复训练手套1进行与数据手套2相同的动作。
34.参看图4,控制装置3的外壳表面还设置有按键302和显示屏301;按键302用于开关电源和当发生意外情况时的急停功能;显示屏301用于显示康复训练时常和手部运动角度信息。
35.参看图5,对本发明一种手功能镜像康复装置的控制装置3的连接关系进行进一步的描述,控制装置3包括外壳和控制部分;控制部分位于外壳内部;控制部分包括显示屏301、按键302、电源303、mcu控制器304、气泵305和电磁阀306;电源303分别为显示屏301、mcu控制器304、气泵305和电磁阀306配置相应的供电电压;气泵305的出气端和电磁阀306通过空气软管102连接;mcu控制器304分别与显示屏301、按键302、气泵305和电磁阀306电性连接。
36.参看图6,mcu控制器接收到数据手套的运动轨迹信号后,使用模糊pid控制算法通过调整电磁阀的开度来控制康复训练手套。
37.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1