一种基于皮层肌肉耦合自主控制的训练装置及其控制方法
本发明涉及一种训练装置和方法,尤其是一种基于皮层肌肉耦合式自主运动控制的训练装置及其控制方法。
背景技术:
1、中风人口逐年增加而医护资源匮乏,康复机器人成为长期临床康复服务的替代方案。除高强度重复训练外,有效中风康复的关键在于准确调动并强化从中枢脑皮层到外周目标肌肉的自主运动,以重塑支配目标肌肉的皮层-肌肉通路,促进运动功能重建。通过捕捉皮层自主运动意图(中枢意图驱动型)或外周自主运动发力(外周发力驱动型)调动患者主动参与训练的自主控制型机器人已成为近年来康复设备设计主流。然而,尽管当前自主控制型康复机器人优于被动训练,其康复效果仍未达理想,不仅无法有效调动目标肌肉相关的指定神经肌肉通路、抑制代偿运动,而且存在引入额外代偿性神经通路的问题。
2、一方面,中枢意图驱动型康复机器人,即脑机接口,通过检测大脑在动作准备阶段运动想象所诱发的神经活动模式,将中枢运动意图直接转换为外设响应并带动患侧肢体运动,而无需外周肌肉实际执行动作,即不涉及皮层-肌肉通路激活。此类控制通常采用具有高时间分辨率的脑电(electroencephalography,eeg)捕捉皮层中节律性神经元放电,将中枢运动意图表征为想象动作期间的事件相关去同步化,以及想象之后的事件相关同步化等脑电模式。然而,中枢意图驱动型康复机器人对有残余运动能力的中风患者却疗效有限。其主要原因是此类机器人控制设计中只有对中枢意图的表征,忽略了中枢意图与外周目标肌肉的耦合协作及相应皮层-肌肉通路激活,并由此引入支配非目标肌肉的代偿性通路,因而无法实现中风后目标肌肉的神经功能重塑及运动功能重建。
3、另一方面,外周发力驱动型康复机器人利用实际肢体动作执行过程中的外周目标肌肉自主发力进行外设控制并辅助目标动作。肌电图(electromyography,emg)是目前最为常用的外周肌肉自主运动的生理表征方式,可测得实时肌肉激活水平,且具有信号强度高、与实时肌力输出成正比、不易受中风后肌间协同异常带来的抵消作用的影响等优点。然而,中风后肌肉痉挛引入的非自主性emg成分会使目标肌肉激活水平显著升高,并引起无需自主运动的机器人误触发,使训练过程接近于被动训练,如代偿运动中主动肌的被动拉伸,无法激活相应皮层-肌肉通路。目前仍未出现可靠的自主性(即从中枢皮层到外周肌肉的)emg提取方法用于康复机器人实时控制,导致外周发力驱动型机器人无法有效调动目标肌肉主动运动、抑制代偿运动,并引起额外代偿性皮层肌肉通路的过度激活问题。
4、目前自主控制机器人控制设计的主要问题为未能完整且准确得表征自主运动下皮层-肌肉的耦合性,因此无法有效募集并强化支配目标肌肉的皮层-肌肉通路,并导致额外代偿性神经肌肉通路的过度激活。脑电和肌电信号之间的相干耦合信号,即皮层-肌肉相干性(corticomuscular coherence,cmc),可用于实时表征自主运动下中枢皮层与外周目标肌肉的神经功能耦合性联结(神经元同步放电的相关程度)。同时,脑电-肌电相干耦合信号在自主运动时幅值高且统计显著,而在肌肉痉挛等非自主运动中幅值低且不显著,因此可用于鉴别中风患者自主/非自主运动状态。然而,目前脑肌电相干耦合信号还未用于康复机器人实时控制,以表征自主运动下的神经肌肉通路激活。
技术实现思路
1、鉴于上述背景,为了解决以上问题中的一个或多个,本发明提供了一种基于皮层肌肉耦合式自主运动控制的训练装置及其控制方法。
2、本领域技术人员将从下面的描述中得出本发明的其他目的。因此,上述对象陈述不是穷尽的,仅用于说明本发明的许多目的中的一些。
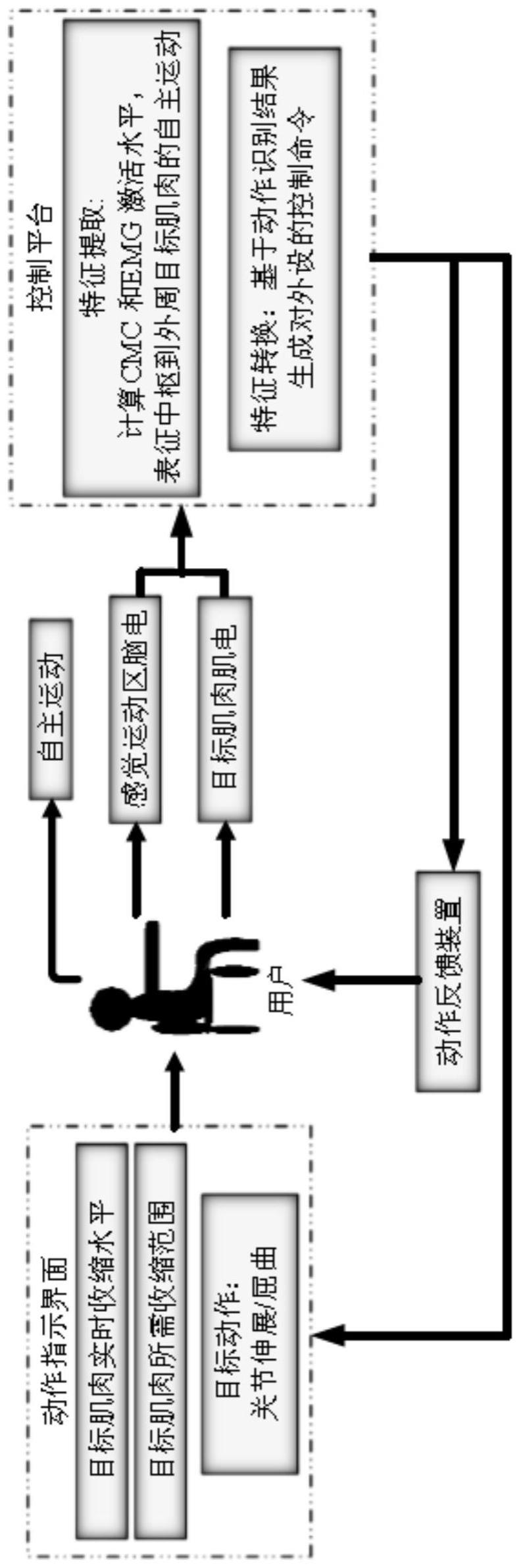
3、因此,本发明的一个方面提供一种基于皮层肌肉耦合式自主运动控制的训练装置,所述装置包括:脑电信号获取单元,被配置为从对象获取对应于目标动作的脑电信号;肌电信号获取单元,被配置为从所述对象获取对应于所述目标动作的肌电信号;控制单元,被配置为基于处理后的脑电信号和肌电信号来计算所述目标动作下的皮层肌肉相干性(cmc)值和肌电图(emg)激活水平,以识别在所述目标动作下从中枢到外周的自主运动,并基于所述识别结果来向动作辅助单元发送控制指令以引导和辅助所述对象的目标动作。
4、在一个实施例中,所述控制单元进一步配置为,在所述皮层肌肉相干性峰值满足预定条件并且所述肌电图激活水平处于预定emg范围内的情况下,向所述动作辅助单元来发送触发指令以使所述动作辅助单元改变所述目标动作。
5、在一个实施例中,所述控制单元进一步配置为,在所述皮层肌肉相干性峰值不满足所述预定条件和/或所述肌电图激活水平没有处于所述预定emg范围内的情况下,向所述动作辅助单元发送维持指令以使所述动作辅助单元重复所述目标动作。
6、在一个实施例中,所述脑电数据获取单元获取n通道脑电信号,其中n大于或等于1,并且所述肌电数据获取单元获取单通道肌电信号。
7、在一个实施例中,所述控制单元基于大脑感觉运动区的n通道脑电信号和目标肌肉的单通道肌电信号的之间的相干耦合信号来计算所述皮层肌肉相干性(cmc)值。
8、在一个实施例中,所述控制单元基于分别经滑动窗分段处理得到的脑电信号与肌电信号,利用以下表达式来计算cmc值:
9、
10、其中,seeg,eeg(f)和semg,emg(f)分别为脑电信号和肌电信号的自谱,seeg,emg(f)=<xeeg(f)x*emg(f)>,为脑电信号和肌电信号之间的互谱,其中xeeg(f)和xemg(f)分别为脑电信号和肌电信号的傅里叶变换,*代表共轭,<>代表数学期望。
11、在一个实施例中,,所述皮层肌肉相干性峰值设置为n个eeg通道中所选定的有效频段。
12、在一个实施例中,所述有效频段为beta频段内的cmc的最大值。
13、在一个实施例中,所述预定条件为所述皮层肌肉相干性峰值是否大于相干耦合信号置信水平,所述相干耦合信号置信水平通过以下表达式计算获得:
14、
15、其中p=0.05为统计显著水平,对应显著概率α=95,n为数据段个数。
16、在一个实施例中,所述肌电图激活水平通过以下方式获得:对emg信号进行整流并采用窗函数进行滑动平均处理,以得到实时emg激活水平;对整个目标动作执行期间的实时emg激活水平取平均,得到的平均emg激活水平即为用于实时控制的emg激活水平。
17、在一个实施例中,所述预定emg范围对应于目标肌肉的肌肉收缩水平,所述肌肉收缩水平通过对用于实时控制的emg激活水平进行归一化处理得到,并且其中归一化表达式如下:
18、
19、其中emgmax和emgbase分别为肌肉在最大等长自主收缩状态下(isometricmaximumvoluntary contraction,imvc)和静息态下的emg激活水平,即100%imvc和0%imvc。
20、在一个实施例中,预定emg范围为50%imvc以下,尤其为10%-30%imvc。
21、在一个实施例中,该装置还包括存储单元,被配置为存储由所述脑电信号获取单元所获取的脑电信号。
22、在一个实施例中,该装置还包括:处理单元,被配置为接收来自所述脑电信号获取单元的脑电信号和来自所述肌电信号获取单元的肌电信号,对所述脑电信号和肌电信号进行处理,并将处理后的脑电信号和肌电信号发送到处理单元。
23、在一个实施例中,该处理单元包括放大器,其以1000hz采样率对所述脑电信号和所述肌电信号进行a/d转换并放大。
24、在一个实施例中,该处理单元包括滤波器,其对所述脑电信号和所述肌电信号进行滤波,以提取所述脑电信号和所述肌电信号的主频段信息并去除工频干扰。
25、在一个实施例中,该脑电信号获取单元包括脑电电极帽,并且该肌电信号获取单元包括肌电电极。
26、在一个实施例中,该动作辅助单元包括提供辅助扭矩支撑的机械臂和带动机械臂的电动机。
27、根据本发明的另一个方面,提供一种对训练装置进行控制的方法,所述方法基于皮层肌肉耦合式自主运动控制,所述方法包括:脑电信号获取步骤,从对象获取对应于目标动作的脑电信号;肌电信号获取步骤,从所述对象获取对应于所述目标动作的肌电信号;识别步骤,基于处理后的脑电信号和肌电信号来计算所述目标动作下的皮层肌肉相干性(cmc)值和肌电图(emg)激活水平,以识别在所述目标动作下从中枢到外周的自主运动,并基于所述识别结果来向动作辅助单元发送控制指令以引导和辅助所述对象的目标动作。
28、根据本发明的另一个方面,提供一种计算机可读存储介质,其能够存储指令以使得当计算机执行该指令时执行一种对训练装置进行控制的方法,所述方法基于皮层肌肉耦合式自主运动控制,包括:脑电信号获取步骤,从对象获取对应于目标动作的脑电信号;肌电信号获取步骤,从所述对象获取对应于所述目标动作的肌电信号;识别步骤,基于处理后的脑电信号和肌电信号来计算所述目标动作下的皮层肌肉相干性(cmc)值和肌电图(emg)激活水平,以识别在所述目标动作下从中枢到外周的自主运动,并基于所述识别结果来向动作辅助单元发送控制指令以引导和辅助所述对象的目标动作。
29、根据本发明的各个方面的方案,能够促进中枢脑皮层与外周目标肌肉的耦合及相应指定神经通路的协同激活,解决现有康复设备的控制设计不仅无法准确募集指定神经肌肉通路、抑制代偿运动,而且会引入额外代偿性神经通路的问题,以期实现准确重塑指定肌肉的运动功能。
- 还没有人留言评论。精彩留言会获得点赞!