一种气管插管机器人的电控驱动一体化电子软镜装置
1.本发明涉及医疗器械领域,尤其是涉及一种气管插管机器人的电控驱动一体化电子软镜装置。
背景技术:
2.气管插管术是将一特制的气管内导管通过口腔或鼻腔,经声门置入气管或支气管内的方法,为呼吸道通畅、通气供氧、呼吸道吸引等提供最佳条件,是抢救呼吸功能障碍患者的重要措施。
3.医用内窥镜是一种常用的医疗器械,其发展至今已有200多年的历史,从硬式内窥镜,半可屈式内窥镜,纤维内窥镜到电子内窥镜。在临床中内窥镜可用于辅助治疗不同的疾病,其末端设置有光源和微型镜头,可经过人体的小孔进入体内,医生通过外部成像系统获取人体组织或器官的图像近而进行手术。根据传导原理,医疗内窥镜分为光学镜和电子镜,光学镜内部结构为物理光学系统,整条光学镜传导的是光,电子镜内部结构为电路系统,整条电子镜传导的是电信号,此外光学镜又分为硬管镜,半硬镜和软镜,电子镜也可分为硬镜和软镜,常用的内窥镜包括腹腔镜、喉镜、关节镜、膀胱镜和输尿管镜,本发明所涉及的软管式内窥镜就是一种电子软镜。
4.对于插管病人,现在常用电子软镜作为探头寻找声门的位置以辅助气管插管,该电子软镜一般由显示器、控制手柄、插入管和弯曲管组成。控制手柄通过钢丝绳驱动弯曲管的弯曲运动,弯曲管作为探头将前方的图像信息经插入管传输到显示器上,医生通过显示器上的信息进一步操作控制手柄以寻找声门完成插管。
5.虽然目前国内绝大部分医院仍然是由有经验的医护人员手动完成气管插管,这不但对熟练度有较高的要求,而且在某些特殊的情况下不便于实现。例如远程抢险救急时医生第一时间不在现场或者需要插管的病人具有一定的传染性,医生长时间暴露在这种的环境下显然是不安全的,而如果穿上厚重的防化服显然又是不利于操作的,当前形势下的新冠肺炎疫情正是其中一种情况,因此,开发出一款实用的气管插管机器人的重要性不言而喻,而本发明正是该自动化插管设备的核心组成部分。
6.在现有技术中,虽然达芬奇手术机器人系统的机械臂可以将纤维支气管镜成功置入模拟人的气管中,理论上可以由机器人完成自动气管插管操作,但该系统设备庞大,价格昂贵,难以普及。目前国内绝大多数医院使用的是手持式内窥镜辅助气管插管,医生需要用一只手举起电子软镜来避免体外的插入管部分弯曲,同时需要控制软镜的弯曲和旋转,另一只手调节病人的口部和推进插入管。
7.现有手持式软镜辅助插管技术操作不方便,过程较繁琐。且操作过程要求医生对于显示器上的不同图像,手部都要迅速做出对应精准的控制,具有很高的熟练度要求。
8.中国专利cn107997825a)公开了一种便携式遥操作气管插管机器人,包括导管姿态调节机构,导管进给机构和压舌板,其导管姿态调节机构通过铜片的形变来改变调节筒的方向,进而控制调节筒内气管的末端方向,压舌板代替喉镜挑起会厌,暴露声门,导管进
给机构将调节好方向的导管经声门送至支气管前1~2cm处。
9.但是,该专利只是简单地往一个方向上单步调节导管方向,过程比较繁琐,控制不够灵活和精确,同时容易由于方向调节不够准确导致推进气管时造成组织损伤,出血等;该机构没有涉及到困难气道,在此情况下,仅通过所述压舌板不能有效暴露声门,固实用性和应用范围有限。
技术实现要素:
10.本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种气管插管机器人的电控驱动一体化电子软镜装置。
11.本发明的目的可以通过以下技术方案来实现:
12.一种气管插管机器人的电控驱动一体化电子软镜装置,该装置包括第一固定板、第二固定板以及多个驱动单元,每个驱动单元均包括固定安装在第一固定板外端面上的步进电机、固定在第一固定板与第二固定板之间的直线滑轨和滚珠丝杠以及套设在滚珠丝杠上且沿直线滑轨滑动的牵引滑块,所述的牵引滑块与电子软镜近端伸出的钢丝绳连接,通过在直线滑轨滑动带动钢丝绳伸缩进而调节电子软镜末端蛇骨管的朝向。
13.所述的滚珠丝杠依次通过联轴器和减速器与步进电机传动连接。
14.所述的驱动单元设有4个,两两一组以相互垂直的设置方式安装,4个牵引滑块分别与电子软镜尾部伸出的4条钢丝绳对应连接。
15.所述的第二固定板中心处开设用以穿过电子软镜的螺纹孔,并且在第二固定板上设有引导单元。
16.所述的引导单元用以分别引导4条钢丝绳,所述的引导单元包括固定在第二固定板外端面上的导向滑轮以及沿周向开设在第二固定板上用以穿过钢丝绳的线孔。
17.每个牵引滑块上设置有固定牵引钢丝绳的细孔和垫片以及用以检测钢丝绳拉力的力传感器。
18.该装置还包括软镜引导单元,所述的软镜引导单元包括直线导轨以及软镜引导结构,所述的软镜引导结构用以实现对电子软镜的限位和推进引导。
19.所述的软镜引导结构包括依次设置并通过线绳连接的第一固定支撑件、多个第二固定支撑件和第三固定支撑件,所述的第一固定支撑件底部与直线导轨滑动连接,顶部固定连接第二固定板,每个第二固定支撑件底部均与直线导轨滑动连接,顶部安装带有卡扣开关的限位卡扣,所述的第三固定支撑件底部固定在直线导轨的安装支架上,顶部安装带有卡扣开关的限位卡扣。
20.所述的电子软镜的末端蛇骨管作为驱动对象,在末端蛇骨管内设置4根细弹簧管,每根钢丝绳一端嵌入细弹簧管内并经钢丝绳孔固定在弯曲末端,另一端则与牵引滑块连接。
21.当该装置用于手术室内时配置安装在递送机械臂上,所述的气管插管机器人包括用以控制步进电机的第一控制器、控制递送机械臂的第二控制器以及分别与第一控制器和第二控制器通信管理的上位机。
22.与现有技术相比,本发明具有以下优点:
23.一、本发明结合了可视化弯曲末端与电控驱动,提高了自动插管机器人插管的灵
活度和精确度,降低了操作者的劳动强度,能够实时观测口腔及喉部的情况,可运用于困难气道,有效避免了组织损伤,出血等。
24.二、该装置自身轻巧便携,可配合递送机械臂,实现一体化控制,结构软镜部分采用多模态末端感知装置,结合了微型摄像模组,微旁流检测模块,微型声传感器和图像处理技术,能够应用大多数困难气道,该气管插管机器人也可用于室外抢救,一线辅助人员完成插管前准备后,由具有熟练插管经验的专家远程操控插管。
附图说明
25.图1为本发明的装置结构示意图。
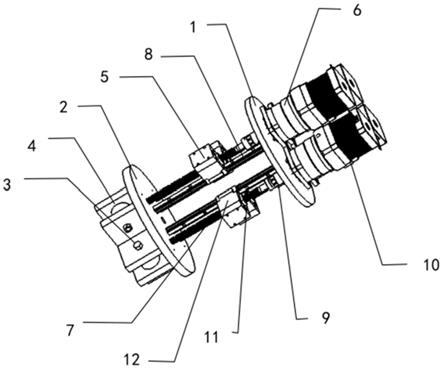
26.图2为驱动部分的结构示意图。
27.图3为引导部分的结构示意图。
28.图4为电子软镜的结构示意图。
29.图5为软镜引导部分的结构示意图。
30.图6为应用场景示意图。
31.图中标记说明:
32.1、第一固定板,2、第二固定板,3、螺钉,4、导向滑轮,5、牵引滑块,6、减速器,7、滚珠丝杠,8、直线滑轨,9、联轴器,10、步进电机,11、力传感器, 12、螺母座,13、线孔,14、电子软镜,15、细钢丝绳,16、蛇骨管,17、固定支撑件,18、卡扣开关,19、呼吸机,20、手术台,21、手术台车,22、控制台车。
具体实施方式
33.下面结合附图和具体实施例对本发明进行详细说明。
34.本发明提供一种气管插管机器人的电控驱动一体化电子软镜装置,该装置安装于气管插管机器人的末端,包括驱动部分、引导部分、电子软镜和软镜引导部分,具体地,驱动部分包括步进电机10、减速器6、联轴器9、滚珠丝杠7、直线滑轨 8和牵引滑块5等,该部分组成的直线模组用以驱动钢丝绳带动电子软镜14弯曲,引导部分包括第二固定板2和4个微型导向滑轮4,用以引导钢丝绳进入驱动部分;电子软镜14的末端内设有包括声音、气体和图像多种信息检测模块。
35.实施例
36.如图1-5所示,本发明的一体化电子软镜固接于基座或递送机械臂等。
37.第一固定板1外端连接4个配备了减速器6的步进电机10用于驱动,优选地,为了便携性,该步进电机10选用微型步进电机,占用空间位置小,所需的力本身不大,经减速器6放大扭矩后即可获得能够驱动电子软镜14的拉力,在本实施例中,上述4个步进驱动电机10及减速器6均匀阵列布置在第一固定板1上,两两为一组,分别控制电子软镜14弯曲部的上下和左右弯曲,并行操作时可实现弯曲部的360
°
灵活弯曲,可替代地,由于钢丝绳对的伸长部分和收缩部分相等,也可仅用一对电机实现同步控制。
38.第一固定板1和第二固定板2起固定和支撑作用,两个固定板之间设有与步进电机10匹配的联轴器9、滚珠丝杠7、螺母座12、牵引滑块5和直线滑轨8,上述零件构成直线模组。具体地,步进电机10通过联轴器9带动滚珠丝杠7转动,能够提供动力和精准控制,并对急转
急停等操作具有一定的缓冲作用,然后经过牵引滑块5和直线滑轨8以限位和提高驱动平稳性,直线滑轨8通过两端的伸出轴固接于两固定板之间,螺母座12可带动牵引滑块5沿直线滑轨8运动,牵引滑块5上设置有细孔、垫片和力传感器11,用于牵引钢丝绳和测量拉力大小。
39.如图3和图4所示,第二固定板2上设置连接电子软镜14的螺纹孔和钢丝绳的线孔13,其上固定四个小型导向滑轮4,电子软镜14近端的钢丝绳经过导向滑轮4的引导,穿过第二固定板2的线孔,最终由牵引滑块5驱动其伸缩。
40.电子软镜14的末端蛇骨管16为本发明的驱动对象,其内含微型多模态传感器,与蛇骨管16相连的中间软管内有4根细弹簧管,弹簧管中嵌入4根钢丝绳15,该钢丝绳15一端经末端蛇骨管16的钢丝绳孔固定于弯曲末端,另一端经导向滑轮4 引导至牵引滑块5上实现驱动,多模态传感器安装在弯曲末端处。
41.本发明可搭配如图5所示的软镜引导部分实现一体化控制,该软镜引导部分包括多个软镜引导结构,软镜引导结构通过导轨滑块固定在直线导轨上,每个软镜引导结构设置有固定支撑件17,软镜引导结构之间均通过线绳连接以实现均匀引导,软镜引导结构顶部设置有限位卡扣和卡扣开关18,起到工作时限位和引导推进的作用,并且其上安装有扭转弹簧,自然状态下,卡扣开关18在弹簧作用下卡紧在固定支撑件17上形成固定,控制开关时,按压卡扣开关的上侧,可以快速打开卡扣并取下软镜。
42.如图6所示,该示意图为具体实施例在手术室内的应用环境,医生通过控制台车22上的操纵杆远程控制电子软镜的推进,并在显示器上获取反馈信息,呼吸机 19为手术台20上的患者通气,手术台车21上经机械臂载有插管机器人,为整个系统的执行机构。
43.具体地,由于本发明的便携性,其既可用于手术室内,也可用于室外抢救。优选地,用于室内时,可配置在上述递送机械臂上,结合软镜引导部分实现自动控制一体化。该发明的4个步进电机10经步进电机驱动器由第一控制器控制,递送机械臂的第二控制器可与第一控制器进行数据通讯,由一台上位机同时管理。用于室外时,由一线辅助人员完成插管前准备,专家可远程遥控插管。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1