一种视网膜手术用的光学相干弹性成像辅助设备的制作方法
1.本发明涉及一种辅助设备,尤其涉及一种视网膜手术用的光学相干弹性成像辅助设备。
背景技术:
2.人眼的视网膜图像是眼科诊断和治疗中不可或缺的重要信息,实时跟踪眼底视网膜的形貌变化将有助于身体疾病的早期诊断和预防。目前,视网膜成像设备将共焦扫描技术应用于活体人眼视网膜成像,探测端的共焦真空针孔用于屏蔽样本非焦面的杂散光,从而获取样本焦面的高分辨图像,然而现有的视网膜成像设备在对患者进行成像时,因患者头部长时间定格在一个方向和平面上,患者靠双手握住设备上的手柄来稳定自身,但是缺少对患者头部进行固定的机构,导致患者头部容易晃动,影响成像结果,且为避免造成交叉感染,医生需要手动借助消毒工具对手柄进行消毒,进而增加医生的工作量。
3.因此,鉴于上述问题提供一种减轻医生工作量,且避免成像结果受影响的视网膜手术用的光学相干弹性成像辅助设备。
技术实现要素:
4.为了克服现有设备无法对患者的头部进行固定,导致患者头部容易晃动,影响成像结果,且需医生需要手动对手柄进行消毒,医生的工作量增加的缺点,本发明的目的是提供一种减轻医生工作量,且避免成像结果受影响的视网膜手术用的光学相干弹性成像辅助设备。
5.技术方案为:一种视网膜手术用的光学相干弹性成像辅助设备,包括有固定支架、固定手柄、超辐射发光二极管、x型光纤耦合器、探测器、支撑移动机构和透镜聚焦机构,固定支架一侧对称设有固定手柄,固定支架上设有超辐射发光二极管,固定支架一侧设有x型光纤耦合器,超辐射发光二极管一侧设有探测器,固定支架一侧设有支撑移动机构,支撑移动机构和x型光纤耦合器上设有透镜聚焦机构。
6.可选地,支撑移动机构包括有滑块、伸缩柱、橡胶托架和第一弹簧,固定支架一侧滑动式设有滑块,滑块顶部对称设有伸缩柱,伸缩柱顶部之间设有橡胶托架,橡胶托架底部与滑块之间对称连接有第一弹簧,第一弹簧均套在伸缩柱上。
7.可选地,透镜聚焦机构包括有压力传感器、第一电动推杆、导向杆、第一移动架、透镜组、平面反射镜和吸尘板,橡胶托架底部设有压力传感器,x型光纤耦合器一侧设有第一电动推杆,x型光纤耦合器顶部设有导向杆,导向杆上滑动式设有第一移动架,第一电动推杆伸缩杆与第一移动架连接,第一移动架一侧设有透镜组,x型光纤耦合器一侧设有平面反射镜,x型光纤耦合器顶部设有吸尘板。
8.可选地,还包括有限位机构,限位机构包括有距离传感器、固定架、第一减速电机、第二减速电机、轴承座、转动板、第一限位板、第二弹簧和海绵垫,x型光纤耦合器顶部设有距离传感器,橡胶托架一侧设有固定架,固定架一侧设有第二减速电机,固定架一侧设有第
一减速电机,第一减速电机和第二减速电机的输出轴上均设有轴承座,轴承座上均设有转动板,转动板上均滑动式设有第一限位板,第一限位板下侧均与同侧的转动板之间连接有3个第二弹簧,转动板顶部均设有海绵垫。
9.可选地,还包括有稳定机构,稳定机构包括有光电传感器、第三减速电机、第二限位板、绕线轮、拉绳、卡位转板、固定块和第三弹簧,一侧的海绵垫中间设有光电传感器,固定支架一侧设有第三减速电机,第三减速电机输出轴一侧设有第二限位板,固定支架一侧设有绕线轮,固定支架顶部转动式设有卡位转板,卡位转板一侧设有固定块,固定块与第二限位板之间连接有拉绳,拉绳绕在绕线轮上,卡位转板与固定支架之间连接有第三弹簧。
10.可选地,还包括有消毒机构,消毒机构包括有储液罐、导液管、支撑架、喷雾罐、活塞杆、第二电动推杆和雾化喷头,固定支架中部设有储液罐,固定支架中部对称设有支撑架,支撑架上部均设有喷雾罐,喷雾罐均与储液罐之间连接有导液管,喷雾罐内部均滑动式设有活塞杆,支撑架上均设有第二电动推杆,第二电动推杆伸缩杆均与同侧的活塞杆连接,喷雾罐下部均设有雾化喷头。
11.可选地,还包括有擦拭机构,擦拭机构包括有楔形块、第二移动架、海绵擦拭刷和第四弹簧,第一移动架上设有楔形块,吸尘板一侧滑动式设有第二移动架,第二移动架与楔形块配合,第二移动架下侧设有海绵擦拭刷,第二移动架与吸尘板之间对称连接有第四弹簧。
12.可选地,透镜聚焦机构还包括有控制箱,x型光纤耦合器一侧设有控制箱,控制箱内安装有蓄电池、电源模块和控制模块,开关电源为整个设备供电,开关电源的输出端与电源模块通过电性连接,电源模块上通过线路连接有电源总开关,电源模块与控制模块通过电性连接;控制模块上连接有ds1302时钟电路和24c02电路;压力传感器、距离传感器和光电传感器都与控制模块通过电性连接;第一减速电机、第二减速电机和第三减速电机都与控制模块通过直流电机正反转模块连接;第一电动推杆和第二电动推杆都与控制模块通过继电器控制模块连接。
13.与现有技术相比,本发明具有如下优点:
14.1、第一减速电机和第二减速电机输出轴带动海绵垫向内转动,使得海绵垫对患者头部进行夹紧,避免患者头部晃动,影响成像结果;
15.2、第三减速电机输出轴带动第二限位板转动,第二限位板通过拉绳带动固定块转动,进而带动卡位转板转动,使得卡位转板卡住滑块,避免检测时卡块滑动;
16.3、第二电动推杆伸缩杆带动活塞杆向下移动,活塞杆挤压喷雾罐内的消毒液,使得消毒液通过雾化喷头进行雾化后喷出,进而对固定手柄进行消毒,避免造成交叉感染;
17.4、当第一移动架带动楔形块向下移动时,楔形块与第二移动架分离,在第四弹簧复位的作用下带动第二移动架和海绵擦拭刷向后移动与透镜组接触,使得海绵擦拭刷对透镜组前侧进行擦拭,避免透镜组前侧沾有灰尘。
附图说明
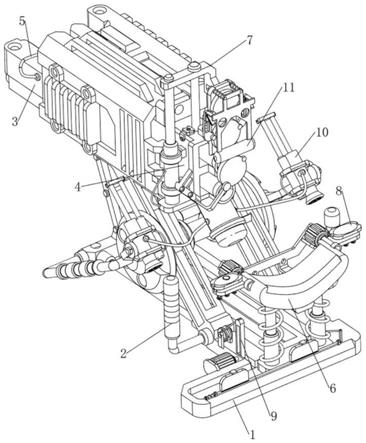
18.图1为本发明的第一视角立体结构示意图。
19.图2为本发明的第二视角立体结构示意图。
20.图3为本发明的第三视角立体结构示意图。
21.图4为本发明的第四视角立体结构示意图。
22.图5为本发明的第一部分立体结构示意图。
23.图6为本发明的第二部分立体结构示意图。
24.图7为本发明的固定支架等第一种立体结构示意图。
25.图8为本发明的固定支架等第二种立体结构示意图。
26.图9为本发明支撑移动机构的立体结构示意图。
27.图10为本发明透镜聚焦机构的第一种立体结构示意图。
28.图11为本发明透镜聚焦机构的第二种立体结构示意图。
29.图12为本发明透镜聚焦机构的第三种立体结构示意图。
30.图13为本发明限位机构的第一部分立体结构示意图。
31.图14为本发明限位机构的第二部分立体结构示意图。
32.图15为本发明稳定机构的立体结构示意图。
33.图16为本发明稳定机构的部分立体结构示意图。
34.图17为本发明消毒机构的部分立体结构示意图。
35.图18为本发明消毒机构的立体结构示意图。
36.图19为本发明擦拭机构的第一种立体结构示意图。
37.图20为本发明擦拭机构的第二种立体结构示意图。
38.图21为本发明的电路框图。
39.图22为本发明的电路原理图。
40.图中附图标记的含义:1:固定支架,2:固定手柄,3:超辐射发光二极管,4:x型光纤耦合器,5:探测器,6:支撑移动机构,61:滑块,62:伸缩柱,63:橡胶托架,64:第一弹簧,7:透镜聚焦机构,71:压力传感器,72:第一电动推杆,73:导向杆,74:第一移动架,75:透镜组,76:平面反射镜,77:控制箱,78:吸尘板,8:限位机构,81:距离传感器,82:固定架,83:第一减速电机,84:第二减速电机,85:轴承座,86:转动板,87:第一限位板,88:第二弹簧,89:海绵垫,9:稳定机构,91:光电传感器,92:第三减速电机,93:第二限位板,94:绕线轮,95:拉绳,96:卡位转板,97:固定块,98:第三弹簧,10:消毒机构,101:储液罐,102:导液管,103:支撑架,104:喷雾罐,105:活塞杆,106:第二电动推杆,107:雾化喷头,11:擦拭机构,111:楔形块,112:第二移动架,113:海绵擦拭刷,114:第四弹簧。
具体实施方式
41.为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作进一步地详细描述。仅此声明,本发明在文中出现或即将出现的上、下、左、右、前、后、内、外等方位用词,仅以本发明的附图为基准,其并不是对本发明的具体限定。
42.实施例1
43.一种视网膜手术用的光学相干弹性成像辅助设备,如图1-22所示,包括有固定支架1、固定手柄2、超辐射发光二极管3、x型光纤耦合器4、探测器5、支撑移动机构6和透镜聚焦机构7,固定支架1前侧左右对称设有固定手柄2,固定支架1上部后侧设有超辐射发光二极管3,固定支架1上部设有x型光纤耦合器4,超辐射发光二极管3左前侧设有探测器5,固定支架1前侧设有支撑移动机构6,支撑移动机构6和x型光纤耦合器4上设有透镜聚焦机构7。
44.支撑移动机构6包括有滑块61、伸缩柱62、橡胶托架63和第一弹簧64,固定支架1前侧滑动式设有滑块61,滑块61顶部左右对称设有伸缩柱62,伸缩柱62顶部之间设有橡胶托架63,橡胶托架63底部与滑块61之间左右对称连接有第一弹簧64,第一弹簧64均套在伸缩柱62上。
45.透镜聚焦机构7包括有压力传感器71、第一电动推杆72、导向杆73、第一移动架74、透镜组75、平面反射镜76和吸尘板78,橡胶托架63底部设有压力传感器71,x型光纤耦合器4左前侧设有第一电动推杆72,x型光纤耦合器4顶部右侧设有导向杆73,导向杆73上滑动式设有第一移动架74,第一电动推杆72伸缩杆上部与第一移动架74连接,第一移动架74前侧设有透镜组75,x型光纤耦合器4左前侧设有平面反射镜76,x型光纤耦合器4顶部前侧设有吸尘板78。
46.当医生需要对患者眼睛进行成像时,可以使用本设备,首先工作人员按下电源总开关将本设备上电,握住固定手柄2,将头部放在橡胶托架63上,由于头部的重力会带动橡胶托架63和压力传感器71向下移动,伸缩柱62和第一弹簧64被压缩,使得患者左眼对着x型光纤耦合器4,压力传感器71与滑块61接触,压力传感器71检测到压力达到预设值,控制模块控制第一电动推杆72启动2秒后停止,第一电动推杆72伸缩杆带动第一移动架74向下移动,进而带动透镜组75向下移动,使得透镜组75下侧的镜片与患者左眼平齐,随后通过超辐射发光二极管3、x型光纤耦合器4和探测器5的运作对患者左眼进行成像,左眼成像完毕后,向左移动滑块61,滑块61带动伸缩柱62、橡胶托架63和第一弹簧64向左移动,使得患者右眼对着x型光纤耦合器4,随后通过超辐射发光二极管3、x型光纤耦合器4和探测器5的运作对患者右眼进行成像,左眼完毕后,患者头部离开橡胶托架63,在第一弹簧64复位的作用下带动伸缩柱62、橡胶托架63和压力传感器71向上移动复位,使得压力传感器71与滑块61分离,压力传感器71检测到压力回到初设值,控制模块控制第一电动推杆72伸缩杆复位2秒后关闭,第一电动推杆72伸缩杆带动第一移动架74和透镜组75复位,吸尘板78可以防止透镜组75上沾有灰尘,不需要使用本设备时,按下电源总开关将本设备断电即可。
47.还包括有限位机构8,限位机构8包括有距离传感器81、固定架82、第一减速电机83、第二减速电机84、轴承座85、转动板86、第一限位板87、第二弹簧88和海绵垫89,x型光纤耦合器4顶部左前侧设有距离传感器81,橡胶托架63后侧设有固定架82,固定架82左侧设有第二减速电机84,固定架82右侧设有第一减速电机83,第一减速电机83和第二减速电机84的输出轴上均设有轴承座85,轴承座85上均设有转动板86,转动板86上均滑动式设有第一限位板87,第一限位板87下侧均与同侧的转动板86之间连接有3个第二弹簧88,转动板86顶部均设有海绵垫89。
48.当第一移动架74向下移动靠近距离传感器81时,距离传感器81检测到与第一移动架74之间的距离达到预设值,控制模块控制第一减速电机83和第二减速电机84输出轴转动四十五度后停止,第一减速电机83和第二减速电机84输出轴带动轴承座85、转动板86、第一限位板87、第二弹簧88和海绵垫89向内转动,使得海绵垫89对患者头部进行夹紧,避免患者头部晃动,影响成像结果,第二弹簧88起缓冲作用,患者向上移动头部,在第一弹簧64复位的作用下带动伸缩柱62、橡胶托架63和压力传感器71向上移动复位,使得压力传感器71与滑块61分离,压力传感器71检测到压力回到初设值,控制模块控制第一电动推杆72伸缩杆复位2秒后关闭,第一电动推杆72伸缩杆带动第一移动架74和透镜组75向上移动复位,使得
第一移动架74向上移动远离距离传感器81,距离传感器81检测到与第一移动架74之间的距离回到初设值,控制模块控制第一减速电机83和第二减速电机84输出轴反转四十五度后关闭,第一减速电机83和第二减速电机84输出轴带动轴承座85、转动板86、第一限位板87、第二弹簧88和海绵垫89向外反转,使得海绵垫89松开患者头部。
49.还包括有稳定机构9,稳定机构9包括有光电传感器91、第三减速电机92、第二限位板93、绕线轮94、拉绳95、卡位转板96、固定块97和第三弹簧98,左侧海绵垫89中间设有光电传感器91,固定支架1左前侧设有第三减速电机92,第三减速电机92输出轴右侧设有第二限位板93,固定支架1左前侧设有绕线轮94,固定支架1顶部前侧转动式设有卡位转板96,卡位转板96右侧设有固定块97,固定块97与第二限位板93之间连接有拉绳95,拉绳95绕在绕线轮94上,卡位转板96左侧与固定支架1之间连接有第三弹簧98。
50.当海绵垫89带动光电传感器91向内转动与患者头部接触时,光电传感器91检测到光线较暗达到预设值,控制模块控制第三减速电机92输出轴转动九十度后停止,第三减速电机92输出轴带动第二限位板93转动,第二限位板93通过拉绳95带动固定块97转动,进而带动卡位转板96转动,第三弹簧98形变,使得卡位转板96卡住滑块61,避免检测时卡块滑动,当海绵垫89带动光电传感器91复位与患者头部分离时,光电传感器91检测到光线亮度回到初设值,控制模块控制第三减速电机92输出轴反转九十度后关闭,第三减速电机92输出轴带动第二限位板93反转,拉绳95被放松,在第三弹簧98复位的作用下带动固定块97和卡位转板96复位,拉绳95被拉直,卡位转板96与滑块61分离。
51.还包括有消毒机构10,消毒机构10包括有储液罐101、导液管102、支撑架103、喷雾罐104、活塞杆105、第二电动推杆106和雾化喷头107,固定支架1中部设有储液罐101,固定支架1中部左右对称设有支撑架103,支撑架103上部均设有喷雾罐104,喷雾罐104均与储液罐101之间连接有导液管102,喷雾罐104内部均滑动式设有活塞杆105,支撑架103上部均设有第二电动推杆106,第二电动推杆106伸缩杆均与同侧的活塞杆105连接,喷雾罐104下部均设有雾化喷头107。
52.在储液罐101内加入适量的消毒液,当光电传感器91检测到光线较暗达到预设值时,控制模块还会控制第二电动推杆106启动2秒后停止,第二电动推杆106伸缩杆带动活塞杆105向上移动,使得储液罐101内的消毒液通过导液管102流进喷雾罐104内,当光电传感器91检测到光线亮度回到初设值时,控制模块控制第二电动推杆106伸缩杆复位后关闭,第二电动推杆106伸缩杆带动活塞杆105向下移动,活塞杆105挤压喷雾罐104内的消毒液,使得消毒液通过雾化喷头107进行雾化后喷出,进而对固定手柄2进行消毒,避免造成交叉感染。
53.还包括有擦拭机构11,擦拭机构11包括有楔形块111、第二移动架112、海绵擦拭刷113和第四弹簧114,第一移动架74上部前侧设有楔形块111,吸尘板78上部滑动式设有第二移动架112,第二移动架112与楔形块111配合,第二移动架112下侧设有海绵擦拭刷113,第二移动架112上部与吸尘板78之间左右对称连接有第四弹簧114。
54.初始状态下的第四弹簧114被拉伸,当第一移动架74带动楔形块111向下移动时,楔形块111与第二移动架112分离,在第四弹簧114复位的作用下带动第二移动架112和海绵擦拭刷113向后移动与透镜组75接触,使得透镜组75向下移动时,海绵擦拭刷113对透镜组75前侧进行擦拭,避免透镜组75前侧沾有灰尘,当第一移动架74带动楔形块111向上移动,
楔形块111与第二移动架112接触,进而带动第二移动架112和海绵擦拭刷113向前移动,第四弹簧114被拉伸。
55.透镜聚焦机构7还包括有控制箱77,x型光纤耦合器4左侧设有控制箱77,控制箱77内安装有蓄电池、电源模块和控制模块,开关电源为整个设备供电,开关电源的输出端与电源模块通过电性连接,电源模块上通过线路连接有电源总开关,电源模块与控制模块通过电性连接;控制模块上连接有ds1302时钟电路和24c02电路;压力传感器71、距离传感器81和光电传感器91都与控制模块通过电性连接;第一减速电机83、第二减速电机84和第三减速电机92都与控制模块通过直流电机正反转模块连接;第一电动推杆72和第二电动推杆106都与控制模块通过继电器控制模块连接。
56.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1