隆鼻术假体尺寸估算装置及其工作方法
1.本发明涉及医疗器械领域,尤其涉及一种隆鼻术假体尺寸估算装置及其工作方法。
背景技术:
2.隆鼻术通过在人鼻部皮肤下植入假体来达到美观鼻部的目的,是整容外科手术中的一种。长期以来,隆鼻术假体尺寸的确定多数依赖于主刀医生的主观经验。植入的假体尺寸不合适,常常导致隆鼻术后假体外露、假体倾斜、软组织溃烂等并发症。多数研究者认为并发症的出现与假体的种类、切口位置、术中使用抗生素或术后护理有关。假体的大小和形状与人鼻部皮肤的力学性能密切相关。由于缺少定量测量受试者鼻部力学性能的方法,目前还没有研究者从力学分析的角度来确定假体的尺寸和探讨并发症出现的原因。
3.廖胜辉等人提出过一种隆鼻术仿真系统,他们基于计算机图形学的理论,由ct扫描(computed tomography,电子计算机x线断层扫描技术)获得受试者的鼻部几何模型,使用体网格拉普拉斯坐标变形方法,预测鼻部的变形,从而确定隆鼻术假体尺寸。该仿真系统能由简单的二维操作指定三维的鼻部模型的变形,并对变形进行良好的预测。但该系统中鼻部的变形仍然是由操作者主观确定的,没有从力学分析的角度出发讨论变形是否超出鼻部软组织和皮肤的承受范围。
4.刘晓芳、赵铱民和吴国锋等人提出过一种建立汉族人三维标准外鼻型态数据库的方法,他们采集了30岁以下男女的6种类型共12个外鼻,进过取模、灌注石膏、3d激光扫描,获得三维数字化模型,将数字化模型的鼻高和鼻宽调整为张万州的汉族成人鼻的活体测量结果,再将数字模型按照解剖形态分为6个区域,在使用逆向工程软件计算相应的曲面,由此建立了标准鼻型数据库,可以满足鼻缺损患者赝复的需要。
5.可以看出,由于缺少定量测量鼻部皮肤力学性能的方法,目前在确定隆鼻术的假体尺寸时多是从美观角度考虑的。如果不从力学的角度考虑假体尺寸,可能会导致隆鼻术后,鼻部皮肤张力过大,无法承受由于植入假体导致的变形,进而增大并发症出现的概率。
技术实现要素:
6.针对上述现有技术中的不足,本发明提供一种隆鼻术假体尺寸估算装置及其工作方法,能够对患者的鼻部进行拉伸试验并自动记录下试验数据,可以根据拉伸试验数据计算患者鼻部的材料参数,进而估算患者隆鼻术所需假体的尺寸。
7.为了实现上述目的,本发明提供一种隆鼻术假体尺寸估算装置,包括一总底座、一头部定位组件、一长行程水平丝杆滑台模组、一竖直丝杆滑台模组组件、一短行程水平丝杆滑台模组、一螺旋机架、若干电源、若干控制器和若干驱动器;所述头部定位组件固定于所述总底座的一端;所述螺旋机架通过所述短行程水平丝杆滑台模组连接于所述头部定位组件后侧的所述总底座上;所述竖直丝杆滑台模组组件通过所述长行程水平丝杆滑台模组连接于所述头部定位组件与所述短行程水平丝杆滑台模组之间的所述总底座上;所述控制器
连接所述电源并通过所述驱动器连接所述长行程水平丝杆滑台模组、所述竖直丝杆滑台模组组件或所述短行程水平丝杆滑台模组。
8.优选地,所述头部定位组件包括一下颌托、一支架和一挡额板;所述下颌托和所述挡额板固定于所述支架上,所述挡额板位于所述下颌托的后侧上方。
9.优选地,所述长行程水平丝杆滑台模组包括一长行程底座、一长行程滑台、一第一螺杆、一第一轴承、一第一联轴器、一第一前挡板、一第一后挡板和一第一步进电机;所述长行程滑台可沿所述长行程底座长度方向滑动地连接于所述长行程底座上;所述第一螺杆通过所述第一轴承可转动地连接于所述长行程底座上且所述长行程滑台与所述第一螺杆螺纹配合;所述第一前挡板连接于所述长行程底座的前端,所述第一后挡板连接于所述长行程底座的后端;所述第一螺杆的前端通过所述第一联轴器穿过所述第一前挡板连接所述第一步进电机的输出轴;所述第一步进电机固定于所述总底座。
10.优选地,所述短行程水平丝杆滑台模组包括一短行程底座、一短行程滑台、一第二螺杆、一第二轴承、一第二联轴器、一第二前挡板、一第二后挡板和一第二步进电机;所述短行程滑台可沿所述短行程底座长度方向滑动地连接于所述短行程底座上;所述第二螺杆通过所述第二轴承可转动地连接于所述短行程底座上且所述短行程滑台与所述第二螺杆螺纹配合;所述第二前挡板连接于所述短行程底座的前端,所述第二后挡板连接于所述短行程底座的后端;所述第二螺杆的前端通过所述第二联轴器穿过所述第二前挡板连接所述第二步进电机的输出轴;所述第二步进电机固定于所述总底座。
11.优选地,所述竖直丝杆滑台模组组件包括两竖直模组、一连接板、一连接片、一工字板和两第三步进电机;两所述竖直模组相互平行地间隔连接于所述连接板和所述连接片之间;每一所述竖直模组包括一竖直模组底座、一盖板、一竖直模组滑台、一第三螺杆、一第三联轴器、一上挡板和一下挡板;所述竖直模组底座和所述盖板相互配合并连接于所述上挡板和所述下挡板之间;所述竖直模组滑台可沿所述竖直模组底座长度方向滑动并两侧露出所述盖板地设置于所述竖直模组底座和所述盖板之间;所述第三螺杆与所述竖直模组滑台螺纹配合且所述第三螺杆的上端通过所述第三联轴器穿过所述上挡板连接一所述第三步进电机的输出轴;所述工字板连接于两所述竖直模组的所述竖直模组滑台之间,所述工字板的中部开设有一圆孔。
12.优选地,所述螺旋机架包括一螺旋机架底座、一螺旋机架滑台、一第四螺杆、一导向杆支架、一角铝、一拉压传感器和一位移传感器;所述导向杆支架竖直固定于所述螺旋机架底座上,所述导向杆支架包括两平行设置的导向杆和连接于两导向杆顶端的一顶板,所述顶板中部形成一第一通孔;所述螺旋机架滑台可沿所述导向杆滑动地套设于两所述导向杆上;所述第四螺杆穿过所述第一通孔与所述螺旋机架滑台螺纹配合,所述第四螺杆顶端形成一调节把手;所述拉压传感器固定于所述螺旋机架滑台上;所述角铝包括一斜板,所述斜板中部形成一第二通孔且所述斜板与水平面呈45
°
夹角;所述位移传感器固定于所述螺旋机架底座上;所述拉压传感器和所述位移传感器连接一计算机。
13.本发明的一种基于本发明所述的隆鼻术假体尺寸估算装置的工作方法,包括步骤:
14.s1:利用所述隆鼻术假体尺寸估算装置测量一受试者的拉伸试验数据,所述拉伸试验数据包括所述位移传感器测量的位移数据和所述拉压传感器测量的拉力数据;
15.所述s1进一步包括步骤:
16.s11:所述受试者将下颌放在所述下颌托上,额头抵住挡额板;
17.s12:将一三爪鼻夹或一皮肤吸盘固定于所述受试者的鼻尖;
18.s13:将一尼龙绳一端连接于所述三爪鼻夹或所述皮肤吸盘上,将所述尼龙绳的另一端穿过所述工字板的所述圆孔和所述角铝的第二通孔后连接于所述拉压传感器;
19.s14:驱动所述长行程水平丝杆滑台模组和所述竖直丝杆滑台模组组件,使得所述工字板前端的尼龙绳沿鼻背方向延伸;
20.s15:驱动所述短行程水平丝杆滑台模组,使得所述尼龙绳接近张紧;
21.s16:通过所述计算机自动记录所述拉伸试验数据;
22.s17:缓慢摇动所述螺旋机架的调节把手张紧所述尼龙绳直至所述受试者感到不适时停止;
23.s18:将所述拉压传感器降低到最低位置,驱动所述短行程水平丝杆滑台模组,使得所述尼龙绳松弛;
24.s19:驱动所述长行程水平丝杆滑台模组和所述竖直丝杆滑台模组组件,使得所述工字板前端的尼龙绳沿鼻小柱方向延伸;重复s15-s18步骤;
25.s110:驱动所述长行程水平丝杆滑台模组和所述竖直丝杆滑台模组组件,使得所述工字板前端的尼龙绳沿水平方向延伸;重复s15-s18步骤;
26.s111:测试结束后从所述受试者鼻尖拆卸三爪鼻夹或所述皮肤吸盘,从所述拉压传感器上拆卸下所述尼龙绳。
27.优选地,所述s1步骤后还包括步骤:
28.s2:建立所述受试者的鼻部的参数化几何模型;
29.所述s2步骤进一步包括步骤:
30.s21:测量所述受试者的鼻部尺寸参数,所述鼻部尺寸参数包括鼻梁长度、鼻小柱长度、鼻翼宽度,鼻根到鼻翼的距离、鼻翼厚度和鼻小柱厚度;
31.s22:用所述鼻部尺寸参数绘制鼻中隔;
32.s23:用样条曲线工具绘制鼻翼轮廓,再用放样工具绘制鼻翼;
33.s24:用样条曲线工具绘制鼻孔轮廓,再用放样切除工具绘制鼻孔;
34.s25:用拉伸切除工具,去除多余部分,绘制平滑的鼻尖;
35.s26:用拉伸切除工具,去除梨状孔以内的部分;
36.s27:用倒角工具,平滑边缘;
37.s28:用镜像工具复制另一侧的鼻翼和鼻孔。
38.优选地,所述s2步骤后还包括步骤:
39.s3:利用所述拉伸试验数据进行基于差分法的参数识别,获得所述受试者的鼻部材料参数;
40.所述s3步骤进一步包括步骤:
41.s31:在所述拉伸试验数据中随机选取若干数据点,作为实测数据
42.s32::利用公式(1)~公式(8)拟合所述实测数据得到c1、c2、c3、c4和c5,记作参数向量c;
43.f=h0{h1[c1+h2c3+h3c4]+h4[c2+h5c5+h6c4]}
ꢀꢀꢀꢀ
(1);其中,
[0044][0045][0046][0047][0048][0049][0050][0051]
其中,f表示拉力,v表示鼻部几何模型的体积,l表示鼻梁长度,δx表示拉伸位移,c1、c2、c3、c4和c5是mooney-rivlin超弹性模型中材料参数,所述mooney-rivlin超弹性模型包括公式(9)~公式(10);
[0052][0053]
w=c1(i
1-3)+c2(i
2-3)+c3(i
1-3)2+c4(i
1-3)(i
2-3)+c5(i
2-3)2ꢀꢀꢀꢀ
(10);
[0054]
其中,t是第二类piola-kirchhoff应力张量,e是green应变张量,w是应变能密度,i1和i2是e的第一不变量和第二不变量;
[0055]
s33:将上一步获得的参数向量记作ck,k表示循环次数,使用有限元方法计算鼻部几何模型的材料参数为ck时,加载相应载荷后的位移,记作位移向量uk;;
[0056]
s34:使用公式(11)计算目标函数g,判断是否符合误差要求,如果符合,那么上一步中使用的参数向量ck就是计算结果,跳到步骤s37,否则进行步骤s35;
[0057][0058]
s35:由公式(13)~公式(14)使用有限元计算,获得tk矩阵;
[0059][0060]
δcj=βjsjꢀꢀꢀꢀ
(14);
[0061]
其中,ui表示第i种拉力加载下鼻部模型的位移,i=1,2,
…
,m,m是选取的实测数据个数,m的取值范围是2到6之间;δcj表示在cj附近的微小变化量,βj是差分步长,βj的取值范围是0.001到0.1之间;cj表示参数向量c的第j个分量,j=1,2,
…
,5;
[0062][0063]
s37:利用迭代获得的材料参数和相应的拉力进行有限元计算,对照计算结果与实测数据是否符合,如果符合,说明收敛正确;如果不符合,则说明收敛到错误的结果,需要调
整迭代步长和初始参数重新计算。
[0064]
优选地,所述s3步骤后还包括步骤:
[0065]
s4:计算受试者的隆鼻术假体尺寸安全范围;
[0066]
所述s4步骤进一步包括步骤:
[0067]
s41:选取在测试过程中所述受试者能承受的最大拉力;
[0068]
s42:计算出施加该拉力后鼻部模型的最大mises应力;
[0069]
s43:将s42中获得的mises应力乘上一个安全系数,作为安全阈值,安全系数的取值范围是0.6到0.8之间;
[0070]
s44:计算鼻部模型在不超过所述安全阈值时沿鼻背方向、鼻小柱方向和水平方向能够发生的最大位移;
[0071]
s45:取s44步骤的三个所述最大位移中的最小值作为假体尺寸安全范围。
[0072]
本发明由于采用了以上技术方案,使其具有以下有益效果:
[0073]
本发明的隆鼻术假体尺寸估算装置操作简单,对受试者的鼻部测试过程由测试者一人即可完成。本发明的鼻部材料参数识别方法有助于医生了解受试者皮肤的状况;安全阈值对定量确定假体尺寸具有参考价值,降低因假体尺寸不合适而导致的术后并发症出现概率。
附图说明
[0074]
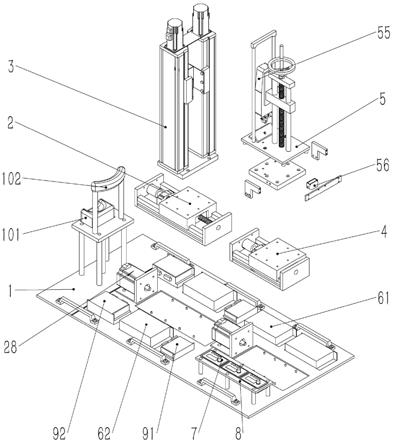
图1为本发明实施例的隆鼻术假体尺寸估算装置的结构示意图;
[0075]
图2为本发明实施例的长行程水平丝杆滑台模组的结构示意图;
[0076]
图3为本发明实施例的短行程水平丝杆滑台模组的结构示意图;
[0077]
图4为本发明实施例的竖直丝杆滑台模组组件的结构示意图;
[0078]
图5为本发明实施例的竖直模组的结构示意图;
[0079]
图6为本发明实施例的螺旋机架的结构示意图;
[0080]
图7为本发明实施例的三爪鼻夹的结构示意图;
[0081]
图8为本发明实施例的皮肤吸盘的结构示意图;
[0082]
图9为本发明实施例的鼻部侧视图;
[0083]
图10为本发明实施例的鼻部正视图;
[0084]
图11为本发明实施例的鼻部仰视图。
具体实施方式
[0085]
下面根据附图图1~图11,给出本发明的较佳实施例,并予以详细描述,使能更好地理解本发明的功能、特点。
[0086]
请参阅图1~图6,本发明实施例的一种隆鼻术假体尺寸估算装置,包括一总底座1、一头部定位组件、一长行程水平丝杆滑台模组2、一竖直丝杆滑台模组组件3、一短行程水平丝杆滑台模组4、一螺旋机架5、若干电源、若干控制器7和若干驱动器;头部定位组件固定于总底座1的一端;螺旋机架5通过短行程水平丝杆滑台模组4连接于头部定位组件后侧的总底座1上;竖直丝杆滑台模组组件3通过长行程水平丝杆滑台模组2连接于头部定位组件与短行程水平丝杆滑台模组4之间的总底座1上;控制器7连接电源并通过驱动器连接长行
程水平丝杆滑台模组2、竖直丝杆滑台模组组件3或短行程水平丝杆滑台模组4,控制器7通过控制器面板8固定于总底座1上。
[0087]
头部定位组件包括一下颌托101、一支架和一挡额板102;下颌托101和挡额板102固定于支架上,挡额板102位于下颌托101的后侧上方。
[0088]
长行程水平丝杆滑台模组2包括一长行程底座21、一长行程滑台22、一第一螺杆23、一第一轴承24、一第一联轴器25、一第一前挡板26、一第一后挡板27和一第一步进电机28;长行程滑台22可沿长行程底座21长度方向滑动地连接于长行程底座21上;第一螺杆23通过第一轴承24可转动地连接于长行程底座21上且长行程滑台22与第一螺杆23螺纹配合;第一前挡板26连接于长行程底座21的前端,第一后挡板27连接于长行程底座21的后端;第一螺杆23的前端通过第一联轴器25穿过第一前挡板26连接第一步进电机28的输出轴;第一步进电机28固定于总底座1。
[0089]
短行程水平丝杆滑台模组4包括一短行程底座41、一短行程滑台42、一第二螺杆43、一第二轴承44、一第二联轴器45、一第二前挡板46、一第二后挡板47和一第二步进电机;短行程滑台42可沿短行程底座41长度方向滑动地连接于短行程底座41上;第二螺杆43通过第二轴承44可转动地连接于短行程底座41上且短行程滑台42与第二螺杆43螺纹配合;第二前挡板46连接于短行程底座41的前端,第二后挡板47连接于短行程底座41的后端;第二螺杆43的前端通过第二联轴器45穿过第二前挡板46连接第二步进电机的输出轴;第二步进电机固定于总底座1。
[0090]
竖直丝杆滑台模组组件3包括两竖直模组31、一连接板32、一连接片33、一工字板和两第三步进电机34;两竖直模组31相互平行地间隔连接于连接板32和连接片33之间;每一竖直模组31包括一竖直模组底座311、一盖板312、一竖直模组滑台313、一第三螺杆314、一第三联轴器315、一上挡板316和一下挡板317;竖直模组底座311和盖板312相互配合并连接于上挡板316和下挡板317之间;竖直模组滑台313可沿竖直模组底座311长度方向滑动并两侧露出盖板312地设置于竖直模组底座311和盖板312之间;第三螺杆314与竖直模组滑台313螺纹配合且第三螺杆314的上端通过第三联轴器315穿过上挡板316连接一第三步进电机34的输出轴;工字板连接于两竖直模组31的竖直模组滑台313之间,工字板的中部开设有一圆孔。
[0091]
螺旋机架5包括一螺旋机架底座51、一螺旋机架滑台52、一第四螺杆53、一导向杆支架54、一角铝、一拉压传感器55和一位移传感器56;导向杆支架54竖直固定于螺旋机架底座51上,导向杆支架54包括两平行设置的导向杆和连接于两导向杆顶端的一顶板,顶板中部形成一第一通孔;螺旋机架滑台52可沿导向杆滑动地套设于两导向杆上;第四螺杆53穿过第一通孔与螺旋机架滑台52螺纹配合,第四螺杆53顶端形成一调节把手;拉压传感器55固定于螺旋机架滑台52上;角铝包括一斜板,斜板中部形成一第二通孔且斜板与水平面呈45
°
夹角;位移传感器56固定于螺旋机架底座51上;拉压传感器55和位移传感器56连接一计算机。
[0092]
本实施例中,电源包括24v直流电源61和48v直流电源62,其中24v直流电源61连接控制器7;48v直流电源62连接第一步进电机28、第二步进电机和第三步进电机34。驱动器包括dm532驱动器91和dm860h驱动器92,其中dm532驱动器91连接两第三步进电机34;dm860h驱动器92连接第一步进电机28和第二步进电机。
[0093]
请参阅图1~图11,本发明的一种基于本发明的隆鼻术假体尺寸估算装置的工作方法,包括步骤:
[0094]
s1:利用隆鼻术假体尺寸估算装置测量一受试者的拉伸试验数据,拉伸试验数据包括位移传感器56测量的位移数据和拉压传感器55测量的拉力数据;
[0095]
s1进一步包括步骤:
[0096]
s11:受试者将下颌放在下颌托101上,额头抵住挡额板102;
[0097]
s12:将一三爪鼻夹或一皮肤吸盘固定于受试者的鼻尖;
[0098]
三爪鼻夹由一根螺纹中轴111、三只爪柄112、一颗圆形螺母113和三只硅胶套组成。使用时先将三只硅胶套套在三只爪柄112的前端,再用m1.4的螺栓和螺母将三只爪柄112固定在螺纹中轴111上,同时螺栓也成为爪柄112的转轴。在受试者鼻尖安装三爪鼻夹时,首先将两只爪柄112的前端深入受试者的鼻孔中,再将另一个爪柄112前端抵住受试者的鼻尖,接着将圆形螺母113从螺纹中轴111尾部拧入。随着螺母拧入,三只爪柄112的尾部被垫高,同时前端抓紧。尼龙绳穿过螺纹中轴111尾部的圆环来与三爪鼻夹固定。试验结束后,拧下圆形螺母113,松开爪柄112,即可拆卸三爪鼻。三爪鼻尖由sla树脂3d打印制作,总质量约5.18g。
[0099]
皮肤吸盘由圆形硅胶片121和带圆环的球面片122组成。使用前需要用胶水将硅胶片黏在球面片122上。进行试验时,使用皮肤粘合剂将硅胶片的另外一面粘在受试者的鼻尖上,压实并去掉球面片122内的空气。尼龙绳穿过球面片122上的圆环来与皮肤吸盘固定。试验结束后,在吸盘边缘涂一层凡士林,溶解皮肤粘合剂,拆卸皮肤吸盘。取下吸盘后需要继续在受试者鼻尖涂抹凡士林,来溶解多余的皮肤粘合剂并擦净即可。皮肤吸盘的总质量约0.68g。
[0100]
s13:将一尼龙绳一端连接于三爪鼻夹或皮肤吸盘上,将尼龙绳的另一端穿过工字板的圆孔和角铝的第二通孔后连接于拉压传感器55;
[0101]
s14:驱动长行程水平丝杆滑台模组2和竖直丝杆滑台模组组件3,使得工字板前端的尼龙绳沿鼻背方向延伸;
[0102]
s15:驱动短行程水平丝杆滑台模组4,使得尼龙绳接近张紧;
[0103]
s16:通过计算机自动记录拉伸试验数据;
[0104]
s17:缓慢摇动螺旋机架5的调节把手张紧尼龙绳直至受试者感到不适时停止;
[0105]
s18:将拉压传感器55降低到最低位置,驱动短行程水平丝杆滑台模组4,使得尼龙绳松弛;
[0106]
s19:驱动长行程水平丝杆滑台模组2和竖直丝杆滑台模组组件3,使得工字板前端的尼龙绳沿鼻小柱方向延伸;重复s15-s18步骤;
[0107]
s110:驱动长行程水平丝杆滑台模组2和竖直丝杆滑台模组组件3,使得工字板前端的尼龙绳沿水平方向延伸;重复s15-s18步骤;
[0108]
s111:测试结束后从受试者鼻尖拆卸三爪鼻夹或皮肤吸盘,从拉压传感器55上拆卸下尼龙绳。
[0109]
s2:建立受试者的鼻部的参数化几何模型;
[0110]
复杂材料或者结构的力学性质无法通过传统的实验方法获得,很多情况下由于材料或者结构特殊,仅能获得待测物体在某些工况或者载荷下的响应,而由这些响应反推材
料或者结构的力学参数的这一过程就叫做参数识别。参数识别的前提是,对于一个结构,给出材料参数和载荷后能够通过有限元方法计算出响应。通常把由材料参数和载荷计算位移的过程叫做正分析。反过来由位移和载荷计算材料参数的过程就叫做反分析。对于本问题,要对鼻部进行正分析,首先要建立它的几何模型。
[0111]
每个人的鼻部尺寸和形状都不尽相同。如果每次计算都要单独建立几何模型,效率低,所以本技术采用了一种参数化建模方法。采用该模块建立鼻部几何模型,只需要输入基本的参数,就可以自动生成几何模型。
[0112]
s2步骤进一步包括步骤:
[0113]
s21:测量受试者的鼻部尺寸参数,鼻部尺寸参数包括鼻梁长度l1、鼻小柱长度l2、鼻翼宽度l3,鼻根到鼻翼的距离l4、鼻翼厚度d1和鼻小柱厚度d2;
[0114]
s22:用鼻部尺寸参数绘制鼻中隔;
[0115]
s23:用样条曲线工具绘制鼻翼轮廓,再用放样工具绘制鼻翼;
[0116]
s24:用样条曲线工具绘制鼻孔轮廓,再用放样切除工具绘制鼻孔;
[0117]
s25:用拉伸切除工具,去除多余部分,绘制平滑的鼻尖;
[0118]
s26:用拉伸切除工具,去除梨状孔以内的部分;
[0119]
s27:用倒角工具,平滑边缘;
[0120]
s28:用镜像工具复制另一侧的鼻翼和鼻孔;
[0121]
s3:利用拉伸试验数据进行基于差分法的参数识别,获得受试者的鼻部材料参数;
[0122]
无论是鼻部组织还是假体材料,从力学行为来看,它们常常被当作超弹性材料处理。超弹性材料存在弹性势能函数,它的应力张量可以由弹性势对应变张量的导数得到。经典的超弹性材料模型如mooney-rivlin超弹性模型,其应变能函数能较好的符合实验数据。我们采用5参数的mooney-rivlin超弹性模型来描述鼻部的力学行为。考虑到鼻部皮肤的变形主要是形状变化,而体积变化不显著,可以在本构方程中增加一条体积不可压缩条件。
[0123]
我们获得了受试者鼻部的拉伸试验数据和几何模型,也确定了用来描述鼻部力学行为的超弹性本构模型,接下来我们提出一种基于差分法的参数识别方法。它思路是,选择若干组载荷,将这些载荷下,由材料参数预测的位移和真实位移的方差作为目标函数。从一组初始材料参数出发,计算该组参数的预测位移,使用差分法代替偏导数计算每一个材料参数对每种位移的偏导数,由该偏导数矩阵微调材料参数。再由调整后的材料参数计算预测位移、计算偏导数矩阵、微调材料参数。如此循坏,直到目标函数小于精度要求。
[0124]
s3步骤进一步包括步骤:
[0125]
s31:在拉伸试验数据中随机选取若干数据点,作为实测数据
[0126]
s32:利用公式(1)~公式(8)拟合实测数据得到c1、c2、c3、c4和c5,记作参数向量c;
[0127]
f=h0{h1[c1+h2c3+h3c4]+h4[c2+h5c5+h6c4]}
ꢀꢀꢀꢀ
(1);其中,
[0128][0129]
[0130][0131][0132][0133][0134][0135]
其中,f表示拉力,v表示鼻部几何模型的体积,l表示鼻梁长度,δx表示拉伸位移,c1、c2、c3、c4和c5是mooney-rivlin超弹性模型中材料参数,mooney-rivlin超弹性模型包括公式(9)~公式(10);
[0136][0137]
w=c1(i
1-3)+c2(i
2-3)+c3(i
1-3)2+c4(i
1-3)(i
2-3)+c5(i
2-3)2ꢀꢀꢀ
(10);
[0138]
其中,t是第二类piola-kirchhoff应力张量,e是green应变张量,w是应变能密度,i1和i2是e的第一不变量和第二不变量;
[0139]
s33:将上一步获得的参数向量记作ck,k表示循环次数,使用有限元方法计算鼻部几何模型的材料参数为ck时,加载相应载荷后的位移,记作位移向量uk;
[0140]
s34:使用公式(11)计算目标函数g,判断是否符合误差要求,一般要求g<g
max
,g
max
是最大允许误差,一般取值范围是10-10
到10-5
之间。如果符合,那么上一步中使用的参数向量ck就是计算结果,跳到步骤s37,否则进行步骤s35;
[0141][0142]
s35:由公式(13)~公式(14)使用有限元计算,获得tk矩阵;
[0143][0144]
δcj=βjsjꢀꢀꢀ
(14);
[0145]
其中,ui表示第i种拉力加载下鼻部模型的位移,i=1,2,
…
,m,m是选取的实测数据个数,m的取值范围是2到6之间;δcj表示在cj附近的微小变化量,βj是差分步长,βj的取值范围是0.001到0.1之间;cj表示参数向量c的第j个分量,j=1,2,
…
,5;
[0146]
s36:由公式(15)计算下一次迭代需要的参数向量c
k+1
,转到s33;
[0147][0148]
s37:利用迭代获得的材料参数和相应的拉力进行有限元计算,对照计算结果与实测数据是否符合,如果符合,说明收敛正确;如果不符合,则说明收敛到错误的结果,需要调整迭代步长和初始参数重新计算。
[0149]
s4:计算受试者的隆鼻术假体尺寸安全范围;
[0150]
s4步骤进一步包括步骤:
[0151]
s41:选取在测试过程中受试者能承受的最大拉力;
[0152]
s42:计算出施加该拉力后鼻部模型的最大mises应力;
[0153]
s43:将s42中获得的mises应力乘上一个安全系数,作为安全阈值,安全系数的取值范围是0.6到0.8之间;
[0154]
s44:计算鼻部模型在不超过所述安全阈值时沿鼻背方向、鼻小柱方向和水平方向能够发生的最大位移;
[0155]
s45:取s44步骤的三个最大位移中的最小值作为假体尺寸安全范围。
[0156]
假体植入后,我们关心的是鼻部的皮肤能否承受假体带来的变形。我们在鼻尖处沿着指定方向进行逐渐增大的位移加载,每次加载后都寻找最大应力值,当该值超过设定的应力阈值时,停止加载,则上一步的位移载荷就是该方向鼻尖能承受的最大变形。从鼻背方向到鼻小柱方向都进行一次前述操作,得到一组位移,这就是鼻部皮肤拉伸的安全范围,可以作为假体尺寸的参考。
[0157]
以上结合附图实施例对本发明进行了详细说明,本领域中普通技术人员可根据上述说明对本发明做出种种变化例。因而,实施例中的某些细节不应构成对本发明的限定,本发明将以所附权利要求书界定的范围作为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1