具有被耦接到插管的传感器和电极的患者通气系统的制作方法
1.本发明整体涉及患者的通气系统,并且具体地涉及使用被耦接到通气系统的插管的传感器来改善患者通气的方法和系统。
背景技术:
2.用于估计患者的呼吸状态并调整通气方案的各种技术已在专利文献中公布。
3.例如,美国专利6,587,726描述了用于电刺激膈神经的示例性装置和方法。在一个实施方案中,将电极放置在颈椎区域的后部和前部。将具有多相波形的电流周期性地施加到电极以刺激膈神经,从而导致隔膜收缩。
4.美国专利申请公开2013/0269701描述了一种用于治疗人的医疗方法,并且包括反复压缩人的胸部。在重复地压缩人的胸部的同时,方法还包含向人重复地递送正压呼吸,并且在正压呼吸之后使用真空从人的气道抽取呼吸气体,以产生胸腔内真空以降低胸腔内压力并增强回到心脏的血流。
技术实现要素:
5.本文所述的本发明的一个实施方案提供了一种用于患者的通气机系统,该通气机系统包括插管、第一微孔传感器和第二微孔传感器以及处理器。
6.插管被配置成使富氧加湿空气(oha)朝患者的肺部流动并排出从肺部呼出的排出空气,插管包括:(i)远侧端部,该远侧端部被配置成被插入患者的气管中,以及(ii)近侧端部,该近侧端部被配置成被连接到一个或多个管,以用于接收oha并排出排出空气。第一微重力传感器在第一位置处被耦接到插管,并且被配置成产生指示插管在第一位置处的第一微加速度的第一信号。第二微重力传感器在不同于第一位置的第二位置处被耦接到插管,并且被配置成产生指示插管在第二位置处的第二微加速度的第二信号。处理器被构造成响应于第一信号和第二信号来控制通气系统以应用通气方案。
7.在一些实施方案中,处理器被配置成基于第一信号和第二信号来估计患者的呼吸状态,并且根据所估计的呼吸状态来控制通气系统以应用通气方案。在其他实施方案中,处理器被配置成基于第一信号和第二信号来计算用于估计患者的呼吸状态的差分信号。在其他实施方案中,通气系统包括一个或多个附加传感器,该一个或多个附加传感器被耦接到插管并且被配置成产生指示患者的呼吸状态的一个或多个附加信号。
8.在一个实施方案中,一个或多个附加传感器包括二氧化碳传感器和压力传感器中的至少一者。在另一个实施方案中,通气系统包括一个或多个电极,该一个或多个电极被耦接到插管的远侧端部并且被配置成检测膈神经的触发,该触发激活患者的隔膜。
9.在一些实施方案中,通气系统包括一个或多个电极,该一个或多个电极被耦接到插管的远侧端部并且被配置成将触发信号施加到患者的膈神经,并且处理器被配置成基于至少第一信号和第二信号经由一个或多个电极将触发信号施加到膈神经。在其他实施方案中,第一位置包括插管的远侧端部,并且第二位置包括插管的近侧端部。
10.根据本发明的实施方案,另外提供了一种方法,方法包括将插管插入患者的气管中,该插管用于使富氧加湿空气(oha)朝患者的肺部流动并排出从肺部呼出的排出空气。插管包括:(i)远侧端部,该远侧端部被插入气管中,以及(ii)近侧端部,该近侧端部被连接到一个或多个管,以用于接收oha并排出排出空气。从第一微重力传感器接收指示插管在第一位置处的第一微加速度的第一信号,第一微重力传感器在第一位置处被耦接到插管。从第二微重力传感器接收指示插管在第二位置处的第二微加速度的第二信号,第二微重力传感器在不同于第一位置的第二位置处被耦接到插管。响应于第一信号和第二信号控制通气系统以应用通气方案。
11.在一些实施方案中,方法包括从一个或多个附加传感器接收指示患者的呼吸状态的一个或多个附加信号。在其他实施方案中,一个或多个附加信号指示以下中的至少一者:(a)从肺部呼出的排出空气中的二氧化碳体积,以及(b)(i)从肺部呼出的排出空气和(ii)流向肺部的oha中的至少一者的压力。
12.根据本发明的另一个实施方案,还提供了一种用于生产用于患者的通气机系统的方法,方法包括接收插管,该插管被配置成使富氧加湿空气(oha)朝患者的肺部流动并排出从肺部呼出的排出空气,插管包括:(i)远侧端部,该远侧端部被配置成被插入患者的气管中,以及(ii)近侧端部,该近侧端部被配置成被连接到一个或多个管以用于接收oha并排出排出空气。第一微重力传感器在第一位置处被耦接到插管,该第一微重力传感器用于产生指示插管在第一位置处的第一微加速度的第一信号。第二微重力传感器在不同于第一位置的第二位置处被耦接到插管,该第二微重力传感器用于产生指示插管在第二位置处的第二微加速度的第二信号。用于响应于第一信号和所述第二信号来控制通气系统以应用通气方案的处理器被连接到第一微重力传感器和第二微重力传感器。
13.结合附图,通过以下对本发明的实施方案的详细描述,将更全面地理解本发明,其中:
附图说明
14.图1是根据本发明的实施方案的具有用于检测患者的呼吸状态的子系统的通气系统的示意性图解;
15.图2是根据本发明的实施方案的流程图,其示意性地示出了用于基于从被耦接到插管的传感器接收的信号来控制通气的方法;并且
16.图3是根据本发明的实施方案的流程图,其示意性地示出用于生产通气系统的方法。
具体实施方式
17.概述
18.当患者不能自己充分呼吸时,通气系统用于机械辅助或替换自主呼吸。此类系统可根据患者的临床情况以不同通气模式操作,如将在下文所述。在实践中,当患者尝试呼吸时,重要的是不抵抗此类呼吸尝试。例如,当通气系统供应空气并且患者咳嗽时,应当控制通气机以暂停空气供应,并且在患者停止咳嗽和/或需要通气之后恢复。因此,重要的是识别或甚至预测患者何时试图或不久将试图独立呼吸。
19.下文所述的本发明的实施方案提供了用于估计患者的呼吸状态的改进技术,以便响应于患者的临床状况,特别是响应于患者的呼吸能力的变化来调整通气治疗。
20.在一些实施方案中,用于为患者通气的通气机系统包括插管,该插管被配置成使富氧加湿空气(oha)朝患者的肺部流动并排出从肺部呼出的排出空气。oha由通气系统产生,并且oha的各种参数诸如流量、压力和气体混合物由通气机系统的控制单元的处理器控制。
21.在一些实施方案中,插管包括:(i)远侧端部,该远侧端部被配置成被插入患者气管中,以及(ii)近侧端部,该近侧端部被配置成被连接到一个或多个管,以用于接收oha并排出排出空气。
22.在一些实施方案中,通气机系统包括第一微重力传感器,该第一微重力传感器被耦接到插管的近侧端部,并且被配置成产生指示插管在近侧端部处的第一微加速度的第一信号,在本文中也称为第一微重力信号。通气机系统还包括第二微重力传感器,该第二微重力传感器被耦接到插管的远侧端部,并且被配置成产生指示插管在插管的远侧端部处的第二微加速度的第二信号,在本文中也称为第二微重力信号。
23.微重力传感器被配置成检测插管的小移动,因此,由处理器接收的微重力信号可能具有不足以检测或预测患者呼吸状态的变化的信噪比。在一些实施方案中,处理器被配置成基于第一微重力信号和第二微重力信号来计算差分信号,以用于估计患者的呼吸状态。例如,处理器可通过在第一微重力信号和第二微重力信号之间进行减法来计算差分信号。
24.在一些实施方案中,通气机系统包括被耦接到插管的远侧端部的一个或多个附加传感器,诸如但不限于二氧化碳传感器和压力传感器。二氧化碳传感器被配置用于检测流出患者肺部的二氧化碳的量,并且压力传感器被配置用于感测在肺部与插管系统之间流动的oha和排出空气的压力。通气机系统还包括一个或多个电极,该一个或多个电极被耦接到插管的远侧端部并且被配置成检测膈神经的触发,该触发激活患者的隔膜。
25.在一些实施方案中,基于从被耦接到插管的传感器接收的信号,处理器被配置成经由一个或多个电极向膈神经施加用于刺激患者的自呼吸的触发信号。
26.公开的技术基于从沿着插管定位在不同位置处的传感器接收的微重力信号导出的差分信号来改善自己不能呼吸的患者的通气质量。此类差分信号可指示患者胸部和/或患者隔膜中的肌肉收缩,这可指示或甚至预测患者意识状态的变化。通气系统的控制单元可使用此类指示以使通气方案适应患者的呼吸状态,以便改进此类患者的治疗。
27.系统描述
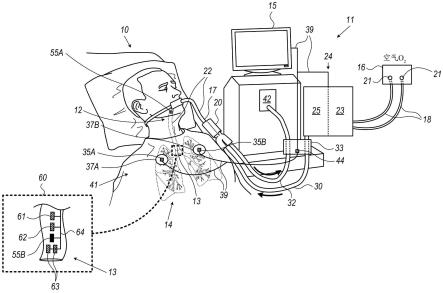
28.图1是根据本发明的实施方案的通气系统11的示意性图解。
29.在一些实施方案中,通气系统11包括富氧加湿空气(oha)供应子系统(ohas)24,其包括空气压缩机23和加湿器25。空气压缩机23被配置成将预先分配的气体混合物压缩至下文所述的预先分配的压力。
30.在一些实施方案中,通气系统11包括被连接在ohas 24和医院供应源16之间的管18。在本示例中,空气压缩机23被配置成经由医院供应源16的出口21接收氧气(o2)和空气,以便在预先分配的混合物(例如,以体积百分比定义)和预先分配的压力下产生前述oha。在本示例中,所产生的oha具有介于约21%和100%之间的典型氧气百分比以及介于约零
cmh2o(当患者10自呼吸时)和50cmh2o之间的预先分配的压力。
31.在一些实施方案中,加湿器25被配置成从环境中收集水分或从任何合适的来源接收水,以便设定oha的预先分配的湿度。例如,加湿器25被配置成以介于约40%和100%之间的选定湿度水平或以任何其他合适的湿度供应oha。在本示例中,ohas 24包括可重复使用的空气压缩机23和加湿器25,其可能必须在不同患者10的通气之间经历最小限度的清洁或消毒或不经历清洁或消毒。
32.在一些实施方案中,系统11包括插管22,该插管具有被配置成被插入到患者10的气管12中的远侧端部13,以及被连接至分叉适配器20的近侧端部17。
33.在一些实施方案中,插管22具有在任何合适的位置处被耦接到近侧端部17的微重力传感器55a。在图1的示例中,微重力传感器55a定位在患者10的口腔内,但在其它实施方案中,微重力传感器55a可沿插管22定位在任何其它合适的位置处,例如,在患者10的口腔外部且在近侧端部17处,或在气管12内但不在远侧端部13处。
34.现在参考插图60,其示出插管22的远侧端部13。在一些实施方案中,插管22包括被耦接到远侧端部13的一种或多种类型的传感器。在本示例中,(i)二氧化碳(co2)传感器61,该co2传感器被配置成产生指示从患者10的肺部14呼出或流出的co2的量(例如,流量或压力)的信号,以及(ii)压力传感器62,该压力传感器被配置成产生指示在肺部14和插管22之间流动的气体的压力的信号。需注意,当系统11使oha流入肺部14中时,由压力传感器62产生的信号提供递送到肺部14中的实际oha压力的指示。类似地,当空气从肺部14流动到插管22时,压力传感器62被配置成提供流出肺部14的空气的实际压力的指示,并且co2传感器61提供流出肺部14的co2(来自空气的总体积)的量或百分比的指示。
35.在一些实施方案中,插管22包括微重力传感器55b,该微重力传感器可与上述微重力传感器55a类似或不同,并且被耦接到插管22的远侧端部13。
36.在一些实施方案中,微重力传感器55a和55b被配置成分别产生第一微重力信号和第二微重力信号,在本文中也分别称为第一信号和第二信号。第一微重力信号指示插管22在微重力传感器55a的位置处(例如,在近侧端部17处)的第一微加速度。第二微重力信号指示插管22在微重力传感器55b的位置处(例如,在远侧端部13处)的第二微加速度。
37.在一些实施方案中,微重力传感器55a和55b包括任何合适类型的微重力传感器。例如,由stmicroelectronics(瑞士日内瓦(geneva,switzerland))生产的lis3dshtr微量重力感测系列产品。在此类实施方案中,微重力传感器55a和55b包括数字微加速度传感器,其被配置成以约
±
2g、4g、6g、8g、16g的加速度范围以及约16666(
±
2g)lsb/g与1369(
±
16g)lsb/g之间的感测灵敏度范围来感测三维微加速度。换句话讲,基于lis3dshtr的微重力传感器55a和55b的灵敏度为约120μg,这对应于16666(
±
2g)lsb/g。如上所述,微重力传感器55a和55b可包括微重力传感器的相同产品或不同产品,并且可包括除上述lis3dshtr微重力感测系列产品之外的任何合适类型的微重力传感器。
38.在一些实施方案中,插管22包括一个或多个电极63(在本示例中为两个电极63),该一个或多个电极被耦接到远侧端部13并且被配置成检测膈神经(未示出)的触发,该触发激活患者10的隔膜(未示出)。除此之外或另选地,电极63被配置成将触发信号施加到患者10的膈神经。
39.在一些实施方案中,插管22包括电引线的编织层64,诸如在柔性印刷电路(未示
出)上形成的电线或电迹线,该电引线的编制层被配置为在(i)传感器61、62、55a和55b及电极63与(ii)系统11的控制单元33之间电连接,这将在下文详细描述。
40.在其他实施方案中,代替编织层64,系统11包括被耦接到插管22的一个或多个无线通信设备(未示出),以及集成在控制单元33中的附加的一个或多个无线通信设备(未示出)。无线通信设备(wcd)和附加wcd被配置成无线地而不是经由编织层64交换感测到的触发信号。在此类实施方案中,系统11的配置可排除编织层64并且包括wcd。
41.现在参见回到图1的全视图。在一些实施方案中,通气系统11包括oha管30,该oha管被耦接在分叉适配器20和ohas 24之间,并且被配置成使由空气压缩机23和加湿器25或者ohas 24产生的oha经由插管22朝患者10的肺部14流动。需注意,肺部14通过图1中的描绘被暴露,并且为了更清楚地展示而示出,需注意,患者10的胸腔中的肺部14覆盖有天然组织(例如,胸膜、骨、肌肉、皮肤等),为了概念清楚起见这些组织从图1中移除。
42.在一些实施方案中,系统11还包括排气管32,该排气管被耦接在分叉适配器20与医院的排气系统(aes)42之间。排气管32被配置成使从肺部14呼出的排出空气经由插管22朝向aes 42流动。
43.需注意,术语“呼出”适用于患者10可独立地从肺部14呼出空气的至少一部分的情况。否则,术语“呼出”可用术语“排出”、“吸气”或“吸出”代替,这些术语是指从患者10的肺部14排出、吸气或吸出,通常是空气的一部分。
44.在其他实施方案中,通气系统11包括多个贴片,在本示例中,两个贴片37a和37b在外部被耦接到例如患者10的胸部41的皮肤。每个贴片包括一个或多个电极,在本示例中,贴片37a包括电极35a,并且贴片37b包括电极35b。
45.在一些实施方案中,电极35a被配置成生成第一心电图(ecg)信号,并且电极35b被配置成产生第二ecg信号。
46.在一些实施方案中,通气系统11的控制单元33被配置成监测和控制通气过程的参数,诸如但不限于流入肺部14中的oha的通气率、气体混合物(例如,氧气)、流量(例如,介于约10升/分钟(lpm)和60lpm之间,或等于任何其他合适的流量)和湿度。在本示例中,控制单元33包括处理器44,该处理器被经由电引线39(或合适的缆线)特别是电连接到ohas 24、显示器15、电极35a和35b以及附加装置(未示出),诸如用于控制通气系统11的传感器和阀(未示出)。
47.在一些实施方案中,电引线的编织层64被连接到控制单元33(例如,通过使电引线耦接到插管22和排气口32并沿着该插管和排气口延伸),并且被配置成在处理器44与被耦接到插管22的设备(例如,上述传感器61、62、55a和55b以及电极63)之间交换信号。
48.在一些实施方案中,处理器44被配置成:通过设定oha的预先分配的阈值,诸如气体混合物(具有介于约21%和100%之间的氧气百分比)、压力(介于约0cmh2o和100cmh2o之间)以及湿度(例如,介于约40%和100%之间),并且通过控制由压缩机23执行的通气率的频率来控制ohas 24的空气压缩机23和加湿器25。
49.在一些实施方案中,系统11包括一个或多个显示器,诸如但不限于显示器15或控制单元33的显示器(未示出)。
50.在一些实施方案中,处理器44被配置成例如在显示器15上显示指示如上所述的oha的通气率、流量、和/或湿度和/或任何其他合适的参数以及在管30和32中流动的排出空
气的一个或多个参数。
51.在一些实施方案中,处理器44被配置成响应于从微重力传感器55a和55b接收的第一微重力信号和第二微重力信号来控制通气系统11以应用通气方案。
52.在一些实施方案中,处理器44被配置成基于第一微重力信号和第二微重力信号来估计患者10的呼吸状态。例如,处理器44被配置成基于第一微重力信号和第二微重力信号来计算差分信号,以用于估计患者10的呼吸状态。差分信号可由处理器44使用任何合适的技术,例如通过在第一微重力信号和第二微重力信号之间进行减法来产生。
53.在一些实施方案中,处理器44被配置成根据估计的呼吸状态(其基于差分信号)来控制通气系统11以应用通气方案。需注意,通过使用差分信号,处理器44改善了用于检测患者10是否自呼吸的灵敏度,因为患者10的整体移动(其中微重力传感器55a和55b两者一起移动)将被排除在差分信号之外。例如,当患者从不清醒或麻醉到清醒状态时,他或她可以移动身体或至少一些器官,使得使用差分信号可以挑选出与患者10的呼吸状态不直接相关的移动。
54.在此类实施方案中,处理器44被配置成识别分别由微重力传感器55a和55b感测的第一微重力信号和第二微重力信号之间的任何相对移动。例如,当患者10开始吸气时,微重力传感器55a相对于微重力传感器55b移动(因为患者10的口腔中的肌肉正在移动),并且随后,当肺部14膨胀到一定程度,并且正在相对于微重力传感器55a移动微重力传感器55b时,微重力传感器55b相对于微重力传感器55a移动。类似地,当患者10开始呼气时,微重力传感器55b相对于微重力传感器55a移动,并且随后,微重力传感器55a相对于微重力传感器55b移动。在此类实施方案中,处理器44被配置成控制ohas 24以降低流入肺部14中的oha的压力和/或流量,以便辅助和/或刺激患者10的自呼吸。
55.在一些实施方案中,基于通过在第一微重力信号和第二微重力信号之间进行减法而产生的差分信号,处理器44被配置成检测患者10何时打算停止和/或逐渐停止和/或立即停止自呼吸。在此类实施方案中,处理器44被配置成控制ohas 24以增加通过插管22流入肺部14中的oha的流量和/或压力。在一些实施方案中,除了基于差分信号的通气方案调整之外,处理器44还被配置成响应于从电极35a和35b接收的ecg信号来调节通气方案的调整。
56.在一些实施方案中,除了基于差分信号的通气方案调整之外,处理器44还被配置成响应于从co2传感器61和/或压力传感器62接收的信号来调节通气方案的调整。
57.在一些实施方案中,基于患者10的呼吸状态和/或应用于患者10的通气方案,处理器44被配置成通过触发膈神经来施加用于刺激患者10的自呼吸的电极63。除此之外或另选地,除了可指示患者10的隔膜的移动的差分信号之外,处理器44还可基于从检测膈神经的触发的一个或多个电极63接收的信号来调节通气调整。
58.除此之外或另选地,基于分别从电极35a和35b接收的第一ecg信号和第二ecg信号,处理器44被配置成响应于从电极35a和35b接收的ecg信号来控制通气系统11以应用通气方案或模式。此类技术例如在美国临时专利申请63/107,009中有详细描述,该申请的公开内容以引用方式并入本文。
59.在一些实施方案中,处理器44被配置成响应于从微重力传感器55a和55b和从传感器61和62以及从电极63、35a和35b接收的信号来调整通气率(即,每分钟通气周期的数量)和其他通气参数。例如,当初始差分信号(从第一差分信号和第二差分信号导出)指示无意
识或麻醉并且稍后差分信号指示或预测患者10正在恢复意识时,处理器44可调整一个或多个通气参数,诸如由ohas 24的压缩机23供应的oha的通气率。
60.在此类实施方案中,处理器44被配置成在通气系统11的高通气模式(hvm)和正常通气模式(nvm)之间切换。换句话讲,基于差分信号,处理器44被配置成检测或甚至预测患者10正在恢复意识,并且因此可将通气率从每分钟约100个通气周期减小到每分钟约15个通气周期。
61.在本公开和权利要求的上下文中,针对任何数值或范围的术语“约”或“大致”指示合适的尺寸公差,该合适的尺寸公差允许部件的一部分或集合为本文所述的预期目的起作用。
62.在一些实施方案中,处理器44被配置成通过控制ohas 24的空气压缩机23和加湿器25产生由ohas 24产生的oha的指定属性时的频率来在hvm模式和nvm模式之间切换。
63.通常,处理器44包括在软件中编程以执行本文描述的功能的通用处理器。例如,软件可通过网络以电子形式被下载到处理器,或者另选地或除此之外,软件可被提供和/或存储在非临时性有形介质诸如磁性、光学或电子存储器上。
64.通过举例的方式示出了通气系统11的该特定配置,以便示出通过本发明的实施方案解决的某些问题,并且展示这些实施方案在增强此类系统的性能方面的应用。然而,本发明的实施方案决不限于这种特定种类的示例性系统,并且本文所述的原理可类似地应用于其他类型的通气系统和/或用作例如进行任何医疗手术的系统的模块的任何其他类型的通气子系统。
65.使用用于估计患者呼吸状态的差分微重力信号来控制通气
66.图2是根据本发明的实施方案的流程图,其示意性地示出了用于基于从被耦接到插管的传感器接收的信号来控制通气的方法。
67.方法在插管插入步骤100处开始,其中插管插入气管12中,插管22具有:(i)远侧端部13,该远侧端部被插入气管中并且具有被耦接到该远侧端部的传感器55b、61和62以及电极63,以及(ii)近侧端部17,该近侧端部被经由适配器20连接到管30和32,以用于使oha朝肺部14流动,并且用于排出从肺部14呼出的排出空气,如上面图1中详细描述的。
68.在微重力信号接收步骤102处,处理器44从微重力传感器55a和55b接收指示插管22的第一微加速度和第二微加速度的第一微重力信号和第二微重力信号,第一微重力信号和第二微重力信号分别在插管22的近侧端部和远侧端部处采集,如上面图1中详细所述的。
69.在一些实施方案中,处理器44基于第一微重力信号和第二微重力信号产生差分信号,如上面图1中详细描述的。
70.在结束该方法的通气系统控制步骤104处,处理器44估计患者10的呼吸状态并响应于差分信号来控制通气系统11以应用或调整通气方案,该差分信号基于第一微重力信号和第二微重力信号。如上面图1所述,处理器44可使用从传感器61和62中的任一个传感器以及从电极63、35a和35b中的任一个电极接收的附加信号来进一步调节通气方案。此外,处理器44可经由电极63将触发信号施加到膈神经以用于刺激患者10的自呼吸,如上面图1中详细描述的。
71.通过举例的方式示出了图2的该特定方法,以便示出通过本发明的实施方案解决的某些问题,并且展示这些实施方案在增强此类通气方法的性能方面的应用。然而,本发明
的实施方案决不限于这种特定种类的示例性系统,并且本文所述的原理可类似地应用于其他种类的通气系统和/或用于为患者通气的其他种类的方法。
72.图3是根据本发明的实施方案的流程图,其示意性地示出用于生产通气系统11的方法。
73.方法在插管接收步骤200处开始,其中接收插管22,该插管具有(i)远侧端部13,该远侧端部被配置成插入患者气管12中,以及(ii)近侧端部17,该近侧端部经由适配器20连接到管30和32,以用于使oha朝肺部14流动,并且用于排出从肺部14呼出的排出空气,如上面图1中详细描述的。
74.在其他实施方案中,方法还包括使用适配器20或任何其他合适的耦接技术将近侧端部17连接到一个或多个管,诸如管30和32。
75.在装置耦接步骤202处,微重力传感器55a被耦接到近侧端部17,以用于产生指示插管22在近侧端部17处的第一微加速度的第一微重力信号。此外,微重力传感器55b被耦接到远侧端部13,以用于产生指示插管22在远侧端部13处的第二微加速度的第二微重力信号。
76.在一些实施方案中,上面图1所述的一个或多个wcd也可被耦接到远侧端部13,并且附加的一个或多个wcd可被耦接到近侧端部17以用于在(i)被耦接到插管的前述传感器和电极与(ii)控制单元33的处理器44之间交换信号。
77.在结束该方法的装置连接步骤204处,上面述图1和步骤202所述的电引线的编织层64和/或wcd用于连接在:(i)微重力传感器55a和55b(以及传感器61和62与电极63之间)与(ii)控制单元33的处理器44之间,如上面图1中描述的。在一些实施方案中,执行步骤202的装置与处理器44之间的连接以用于响应于第一微重力信号和第二微重力信号以及从传感器61和62以及从电极63接收的其他感测到的信号来控制通气系统以应用和/或调整前述通气方案。电连接还可用于经由电极63将触发信号施加到膈神经以用于刺激患者10的自呼吸。
78.在其他实施方案中,在上文步骤200中描述的近侧端部17与一个或多个管之间的连接可在上文步骤202和204中描述的装置的耦接和连接结束之后执行。
79.通过举例的方式示出了用于生产系统11的该特定方法,以便示出通过本发明的实施方案解决的某些问题,并且展示这些实施方案在增强此类系统的性能方面的应用。然而,为了概念清晰起见,本发明的实施方案被简化,并且绝不限于用于生产该通气系统的这种特定种类的示例性方法。此外,应当理解,此类通气系统的生产包括为了陈述简洁起见从方法中有意省略的附加步骤。
80.虽然本文描述的实施方案主要论述用于患者的通气机系统,但本文描述的方法和系统也可用于其他应用中。
81.因此应当理解,上面描述的实施方案以举例的方式被引用,并且本发明不限于上文特定示出和描述的内容。相反,本发明的范围包括上文描述的各种特征的组合和子组合以及它们的变型和修改,本领域的技术人员在阅读上述描述时将会想到该变型和修改,并且该变型和修改并未在现有技术中公开。以引用方式并入本专利申请的文献被视为本技术的整体部分,不同的是如果这些并入的文献中限定的任何术语与本说明书中明确或隐含地给出的定义相冲突,则应仅考虑本说明书中的定义。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1