一种神经康复辅助训练器械的使用方法与流程
1.本发明涉及医疗器械领域,特别涉及一种神经康复辅助训练器械的使用方法。
背景技术:
2.桥式运动是医学康复训练中常见的一种训练方法,桥式运动有利于提高骨盆对下肢的控制及协调能力,是成功站立和行走的基础,桥式运动可以很好的训练伸髋肌群及启动臀肌,属于简单有效的动作。人体常见姿势包括髋关节过度前倾,使得髋关节伸展及启动臀肌工作变得异常困难,所以桥式运动可以打破此种困难的模式。对于瘫痪患者桥式运动是最基础的训练,也是所有动作练习的前提与基础。
3.由于瘫痪患者自身肌力不足,无法自主完成动作训练,因此临床上一般为康复师或者患者家属进行辅助训练的方式进行。训练时,患者仰卧在床面且双腿屈曲,辅助人员一只手压住患者双脚,使双脚保持固定,另一只手拖住患者臀部朝下,靠近大腿的位置,向上抬举,患者自主发力加辅助人员的抬举力,使患者臀部向上提升至最大位置,保持一定时间后,臀部下降至床面。
4.然而这种方式严重依赖康复师或其他辅助人员,患者自主力量较弱时,对辅助人员的体力是一个较大的考验。另外,由于单个辅助人员每次只能辅助一名患者,因此对于康复师而言,其远无法满足较多的患者的康复需求。
5.现有技术中,存在一些辅助抬升的装置。但是这些抬升装置,仅能提供单一方向的助力,如仅能提供竖直方向上的辅助抬升,或沿某一特定直线方向上的辅助抬升。然而患者进行桥式运动时,其大腿和臀部的运动轨迹是变化的、非直线的,大致呈沿一圆心的圆弧形运动轨迹,而康复师手部辅助抬升是可以随着患者的运动轨迹而同步适应的,单一方向的辅助抬升无法有效模拟康复师的辅助动作,在抬升过程中会由于抬升装置与患者身体之间产生的位移导致皮肤拉伤、产生疼痛感等不适的症状,同时也无法有效的和患者身体贴合,从而提供较好的支撑作用。
技术实现要素:
6.本发明提供一种神经康复辅助训练器械的使用方法,可以解决现有技术中患者进行桥式运动时需要依赖辅助人员,对辅助人员体力消耗大,辅助抬升装置抬升方向单一的问题。
7.一种神经康复辅助训练器械的使用方法,基于一辅助训练装置,所述辅助训练装置包括床板,还包括:
8.调节装置,所述调节装置为两个,两个所述调节装置分别位于所述床板的两侧,所述调节装置包括调节支架和转轴;
9.所述调节支架包括第一调节架和第二调节架,所述第一调节架和所述第二调节架上分别开设有第一调节槽和第二调节槽,所述第一调节槽和所述第二调节槽的延伸轨迹位于同一圆周上;所述第一调节槽和所述第二调节槽内分别开设有第一调节齿和第二调节
齿,所述第一调节齿和所述第二调节齿的开设方向相反;
10.所述转轴的两端分别可滑动地设置在所述第一调节槽和所述第二调节槽内,所述转轴对应所述第一调节槽和所述第二调节槽的端部分别设置有第一转向齿轮和第二转向齿轮,所述第一转向齿轮与所述第一调节齿相啮合,所述第二转向齿轮与所述第二调节齿相啮合;所述转轴转动时,其两端分别沿所述第一调节槽和所述第二调节槽滑动,使所述转轴呈顺时针或逆时针方向转动;
11.支撑带,所述支撑带搭设在两个所述转轴上,所述支撑带移动时,带动所述转轴转动;以及,
12.驱动装置,用于使位于两个转轴之间的所述支撑带的长度变长或变短,以使所述支撑带产生移动;
13.所述使用方法包括:
14.s1,使用者采取仰卧位,使大腿部放置在支撑带上,位于两个所述转轴之间,固定脚部;
15.s2,启动所述驱动装置,所述驱动装置使所述支撑带收紧并拉升;
16.s3,所述支撑带带动所述转轴转动,所述转轴转动时,带动所述第一转向齿轮和所述第二转向齿轮转动,所述第一转向齿轮和所述第二转向齿轮在所述第一调节齿和所述第二调节齿的作用下,带动所述转轴转动,所述转轴带动所述支撑带翻转;
17.s4,当所述支撑带提升至预设位置时,关闭所述驱动装置。
18.更优地,所述驱动装置包括驱动电机和辊筒,所述驱动电机固定设置在所述床板上,所述驱动电机用于带动所述辊筒转动;所述支撑带的两端分别固定连接至所述辊筒的两侧,所述辊筒转动时,收紧或放宽所述支撑带。
19.更优地,所述床板上设置有两个用于固定双脚的绑带。
20.更优地,所述辅助训练装置还包括检测装置,其包括压力传感器和处理器,所述压力传感器为两个,两个所述压力传感器的位置分别与两个所述绑带的位置相对应;所述压力传感器、所述驱动电机均信号连接至所述处理器;
21.所述s1包括:
22.使用者采取仰卧位,使大腿部放置在支撑带上,位于两个所述转轴之间,固定脚部,使双脚分别压设于两个所述压力传感器上,所述压力传感器检测信号并发送至所述处理器,当压力值大于预设阈值时,所述处理器判断为双脚正确放置;
23.所述s4包括:
24.所述支撑带提升,带动使用者的双脚具有脱离所述压力传感器的趋势,所述压力传感器检测到压力值变化并发送至所述处理器,当压力值小于预设阈值时,处理器接收信号并判断为支撑带提升至最大位置,所述处理器控制所述驱动电机停止转动。
25.更优地,所述转轴上对应所述支撑带的位置设置有驱动辊,所述驱动辊上开设有第一驱动齿,所述支撑带的一侧面上设置有第二驱动齿,所述第一驱动齿与所述第二驱动齿相啮合。
26.更优地,所述驱动辊上开设有防偏槽,所述防偏槽的延伸轨迹为圆环形结构,所述支撑带上对应所述防偏槽的位置设置有防偏块,所述防偏块可滑动地设置在所述防偏槽内。
27.更优地,所述防偏槽包括第一防偏槽和第二防偏槽,所述防偏块包括第一防偏块和第二防偏块,所述第一防偏槽、所述第二防偏槽、所述第一防偏块和所述第二防偏块的横截面呈梯形结构。
28.更优地,还包括:
29.防疲劳装置,其包括推板和让位弹簧,所述让位弹簧套设在所述驱动辊上,所述推板呈环形结构且套设在所述驱动辊上;
30.所述转轴倾斜布置,所述第一防偏槽较所述第二防偏槽高,所述第二防偏槽的宽度较所述第一防偏槽的宽度大;所述防疲劳装置位于所述第二防偏槽内且位于所述第二防偏块远离所述第一防偏块的一侧,所述推板可滑动地设置在所述防偏槽内,所述让位弹簧的一端固定连接至所述推板、另一端固定连接至所述防偏槽内,所述第二防偏块远离所述第一防偏块的一侧抵靠在所述推板上。
31.本发明提供一种神经康复辅助训练器械的使用方法,通过调节装置,可以使转轴在沿轴线周向转动时,会同步沿第一调节槽和第二调节槽的延伸轨迹转动,从而带动支撑带同步转动,使支撑带能够更好的给予患者以支撑,能够跟随患者体位的变化而变化;支撑带收紧时,位于两个转轴之间的支撑带向上拉升,从而使患者体位得到抬升。患者的体位抬升和支撑带支撑位置的变化,无需额外动力,仅需辊筒的转动,从而实现了复合运动的自动化。
附图说明
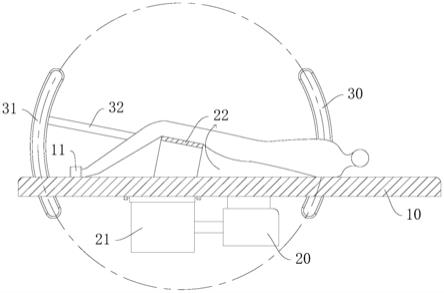
32.图1为本发明提供的一种神经康复辅助训练器械的使用方法的结构示意图;
33.图2为图1中a处局部放大图;
34.图3为本发明提供的一种神经康复辅助训练器械的使用方法的工作状态示意图一;
35.图4为本发明提供的一种神经康复辅助训练器械的使用方法的工作状态示意图二;
36.图5为本发明提供的一种神经康复辅助训练器械的使用方法的结构示意图二;
37.图6为图1中第一调节架和第一转向齿轮的工作状态示意图;
38.图7为防疲劳装置的结构示意图;
39.图8为本发明提供的一种神经康复辅助训练器械的使用方法的系统原理图;
40.图9为图7中b处局部放大图;
41.图10为图9中未设置防疲劳装置时的受力状态示意图。
42.附图标记说明:
43.10床板;11绑带;12压力传感器;13导向辊;20驱动电机;21辊筒;22支撑带;221第一防偏块;222第二防偏块;23推板;24让位弹簧;30第一调节架;301第一调节槽;302第一调节齿;31第二调节架;32转轴;321第一转向齿轮;33驱动辊;331第一防偏槽;332第二防偏槽。
具体实施方式
44.下面结合附图,对本发明的一个具体实施方式进行详细描述,但应当理解本发明
的保护范围并不受具体实施方式的限制。
45.实施例一:
46.如图1至图2所示,本发明实施例提供的一种神经康复辅助训练器械的使用方法,基于一辅助训练装置,该装置包括床板10,还包括:
47.调节装置,调节装置为两个,两个调节装置分别位于床板10的两侧,调节装置包括调节支架和转轴32;
48.调节支架包括第一调节架30和第二调节架31,如图3所示,第一调节架30和第二调节架31均呈圆弧形结构且共同位于同一圆周轨迹上,第一调节架30和第二调节架31上分别开设有第一调节槽301和第二调节槽,第一调节槽301和第二调节槽的延伸轨迹位于同一圆周轨迹上;如图6所示,第一调节槽301和第二调节槽内分别开设有第一调节齿302和第二调节齿,第一调节齿302和第二调节齿的开设方向相反,也即第一调节齿302开设在第一调节槽301的一侧壁上,以图6的视角为例,其为正视第一调节架30时的视角,第一调节齿302开设在第一调节槽301右侧的侧壁上,相应的,第二调节齿开设在第二调节槽的左侧的侧壁上;
49.转轴32的两端分别可滑动地设置在第一调节槽301和第二调节槽内,转轴32对应第一调节槽301和第二调节槽的端部分别设置有第一转向齿轮321和第二转向齿轮,也即第一转向齿轮321和第二转向齿轮分别设置在转轴32的两端且分别位于第一调节槽301和第二调节槽内,第一转向齿轮321与第一调节齿302相啮合,第二转向齿轮与第二调节齿相啮合;转轴32转动时,其两端分别沿第一调节槽301和第二调节槽滑动,使转轴32呈顺时针或逆时针方向转动。
50.支撑带22,如图1所示,支撑带22搭设在两个转轴32上,支撑带22移动时,带动转轴32转动;以及,
51.驱动装置,用于使位于两个转轴32之间的支撑带22的长度变长或变短,以使支撑带22产生移动。具体的,如图5所示,驱动装置包括驱动电机20和辊筒21,驱动电机20固定设置在床板10上,驱动电机20用于带动辊筒21转动;支撑带22的两端分别固定连接至辊筒21的两侧,辊筒21转动时,收紧或放宽支撑带22。以图5为例,当辊筒21转动时,支撑带22绕设在辊筒21上,使得支撑带22的有效工作长度变短,此时支撑带22产生移动,带动转轴32转动(工作时人体压在支撑带22上,因此可以产生足够的摩擦力),可以理解的是,为了提高摩擦力,可以使支撑带22朝向转轴32的一侧面上呈较粗糙的状态,使转轴32对应支撑带22的位置也呈较粗糙的状态,以增大摩擦力。在此过程中,支撑带22缩短,位于两个转轴32之间的支撑带22会受拉从而抬升,给予患者以辅助的抬升力。
52.为了使支撑带22的移动更加顺畅,在床板10的两侧还设置有导向辊13,用于对支撑带22进行导向。
53.该使用方法包括:
54.该使用方法包括:
55.s1,使用者采取仰卧位,使大腿部放置在支撑带22上,位于两个转轴32之间,固定脚部;
56.s2,启动驱动装置,驱动装置使支撑带22收紧并拉升;
57.s3,支撑带22带动转轴32转动,转轴32转动时,带动第一转向齿轮321和第二转向
齿轮转动,第一转向齿轮321和第二转向齿轮在第一调节齿302和第二调节齿的作用下,带动转轴32转动,转轴32带动支撑带22翻转;
58.s4,当支撑带22提升至预设位置时,关闭驱动装置。
59.工作时,如图3所示,初始时,患者呈仰卧位,将脚部固定,大腿部搭设在支撑带22上,此时两个转轴32之间的支撑带22位置较低,当转轴32沿某一方向转动时,会同时带动两端的第一转向齿轮321和第二转向齿轮转动,第一转向齿轮321和第一调节齿302相啮合,此时以第一转向齿轮321逆时针转向为例,第一转向齿轮321转动与第一调节齿302相配合,第一转向齿轮321会产生沿第一调节槽301的延伸轨迹且向下的运动,也即此时转轴32的右端呈顺时针方向移动,相反的,此时第二转向齿轮会逆时针转动且与第二调节齿相配合,由于第二调节齿的位置和第一调节齿302的位置相反,此过程中,第二转向齿轮会向上呈顺时针方向移动,最终实现转轴32的顺时针转动,从而运动至如图4所示的状态。此过程中,支撑带22受拉会向上抬升,且由于转轴32的转动,会使得其对支撑带22的支撑位产生变化,使得支撑带22在转轴32的支撑下,会产生翻转,其翻转角度和人体的翻转角度大致相同,从而使得支撑带22能够始终保持和患者大腿部贴合的状态,从而提供较好的支撑效果,避免人体角度产生变化而支撑带22未产生变化而造成的支撑带22局部受力,对患者的支撑效果变差、支撑部压强变大,造成患者不适。
60.实施例二:
61.为了避免辊筒21持续转动圈数过大,使支撑带22两端受力过大而造成设备损坏,因此实际使用时,不会使支撑带22抬升至最大高度。但是这又会导致支撑带22持续抬升,而患者脚部被固定,造成患者小腿部被过度拉扯,造成损伤。
62.因此,在本实施例中,如图1、图2和图8所示,床板10上设置有两个用于固定双脚的绑带11。还包括检测装置,其包括压力传感器12和处理器,压力传感器12为两个,两个压力传感器12的位置分别与两个绑带11的位置相对应;压力传感器12、驱动电机20均信号连接至处理器。
63.s1包括:
64.使用者采取仰卧位,使大腿部放置在支撑带22上,位于两个转轴32之间,固定脚部,使双脚分别压设于两个压力传感器12上,压力传感器12检测信号并发送至处理器,当压力值大于预设阈值时,处理器判断为双脚正确放置;
65.s4包括:
66.支撑带22提升,带动使用者的双脚具有脱离压力传感器12的趋势,压力传感器12检测到压力值变化并发送至处理器,当压力值小于预设阈值时,处理器接收信号并判断为支撑带22提升至最大位置,处理器控制驱动电机20停止转动。
67.其他步骤与实施例一中的步骤相同。
68.工作时,将患者的双脚分别放置在两个压力传感器12上,压力传感器12检测到信号发送至处理器。在装置持续工作过程中,支撑带22上升,当上升到患者腿部已经被抬升至最高位置时,此时双脚由于受拉,会逐渐产生脱离压力传感器12的趋势,也即压力传感器12此时检测到压力逐步变小并持续发送至处理器,当小到预设阈值时,处理器判断支撑带22已经运动至最佳位置,则此时处理器控制驱动电机20停止工作或进行反向转动,使患者体位回到初始位置。可以理解的是,当电机反向转动后,支撑带22由于受到人体重力作用,位
于两个转轴32之间部分的支撑带22会下沉,呈与实施例一相反的运动过程,从而使患者回到初始位置。
69.实施例三:
70.在实施例二的基础上,由于转轴32转动角度后,呈倾斜布置,此时支撑带22也呈倾斜布置,由于人体中心在支撑带22的一侧,人体会产生滑动的趋势,使得支撑带22会在转轴32上产生偏斜滑动(朝向转轴32较低的一侧滑动),影响器械的正常工作。
71.因此在本实施例中,如图7、图9和图10所示,转轴32上对应支撑带22的位置设置有驱动辊33,驱动辊33上开设有第一驱动齿,支撑带22的一侧面上设置有第二驱动齿,第一驱动齿与第二驱动齿相啮合。
72.进一步的,驱动辊33上开设有防偏槽,防偏槽的延伸轨迹为圆环形结构,支撑带22上对应防偏槽的位置设置有防偏块,防偏块可滑动地设置在防偏槽内。
73.通过防骗槽和防偏块的设置,可以使得支撑带22在滑动时,会受到防偏块的拉力,从而无法产生偏移,避免支撑带22的异常滑动。
74.实施例四:
75.在实施例三中,单一防偏槽和防偏块支撑效果有限,长时间使用或受力后,防偏块处容易产生开裂而损坏。由于支撑带22较快,当其受到人体的拉力时,支撑带22容易产生翻转,因此在本实施例中,防偏槽包括第一防偏槽331和第二防偏槽332,防偏块包括第一防偏块221和第二防偏块222,第一防偏槽331、第二防偏槽332、第一防偏块221和第二防偏块222的横截面呈梯形结构。使得防偏效果更好。
76.进一步地,如图10所示,当采用两个或个防偏槽和防偏块可以提高支撑带22的疲劳强度,提升支撑效果,但由于实际工作时,转轴32呈倾斜布置,人体在支撑带22上的拉力和重力大部分集中在支撑带22较低的一侧,图7展示了工作时支撑带22的受力情况,此时第二防偏块222所受到的力要大于第一防偏块221所受到的力,如图10所述,展示了第二防偏块222此时所受到的第二防偏槽332的阻力情况,图中圆圈标注处容易产生应力集中而开裂损坏,而由于第一防偏块221所受到的力要小于第二防偏块222所受到的力,两者无法均衡受力,造成第二防偏块222要较第一防偏块221的寿命短,造成不必要的浪费,也不利于器械的工作,因此本实施例还包括:
77.防疲劳装置,如图9所示,其包括推板23和让位弹簧24,让位弹簧24套设在驱动辊33上,推板23呈环形结构且套设在驱动辊33上;
78.转轴32倾斜布置,第一防偏槽331较第二防偏槽332高,第二防偏槽332的宽度较第一防偏槽331的宽度大;防疲劳装置位于第二防偏槽332内且位于第二防偏块222远离第一防偏块221的一侧,推板23可滑动地设置在防偏槽内,让位弹簧24的一端固定连接至推板23、另一端固定连接至防偏槽内,第二防偏块222远离第一防偏块221的一侧抵靠在推板23上。
79.当支撑带22受力时,第二防偏块222由于具有一定的活动空间,会产生向右、向下的位移,而此过程中第一防偏块221由于空间受限,会提前受到阻力,从而分摊部分载荷,而随着转轴32的持续转动,第二防偏块222受到的力加大,压缩推板23,使让位弹簧24产生压缩,第二防偏块222受力变大,从而使得第一防偏块221和第二防偏块222之间所受到的阻力能够更加均衡,有效延长支撑带22的使用寿命。
80.以上公开的仅为本发明的几个具体实施例,但是,本发明实施例并非局限于此,任何本领域的技术人员能思之的变化都应落入本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1