一种用于FMCW雷达的多目标呼吸和心跳信号检测方法
一种用于fmcw雷达的多目标呼吸和心跳信号检测方法
技术领域
1.本发明涉及雷达目标检测与信号处理领域,尤其涉及一种用于fmcw雷达的多目标呼吸和心跳信号检测方法。
背景技术:
2.呼吸和心跳是人体重要的生命体征信号,目前常用的检测方式都为接触式检测方式,在对重症感染病人和重度烧伤患者体征信号检测时有很大的局限性。基于雷达的非接触式生命体征检测技术具有远距离、穿透性和非接触等特点,在医疗监护领域有广阔的应用前景。应用于生命体征信号检测领域的雷达体制主要有三种,分别为连续波(cw)、超宽带(uwb)以及线性调频连续波(fmcw)。fmcw雷达具有uwb雷达的测距能力和cw雷达高灵敏度的特点,而且具有体积小、重量轻、功耗低的优势,因此,fmcw毫米波雷达是非接触式生命体征检测系统的优先选择。
3.fmcw雷达利用人体胸腔运动产生的微多普勒效应,通过目标距离单元信号相位的变化来检测呼吸和心跳信号。在进行多目标的呼吸和心跳检测时,由于不同距离的目标回波强度存在差异,而且目标回波还受到相近距离单元内的其他物体回波和人体自身抖动信号的干扰,因此,如何准确检测目标距离,对于提高多目标呼吸和心跳信号检测准确性至关重要。
技术实现要素:
4.针对现有技术存在的不足,本发明提供了一种用于fmcw雷达的多目标呼吸和心跳信号检测方法。该方法对部分时间距离帧数据进行恒虚警率检测和k-means距离聚类,可克服干扰杂波影响,快速得到多个目标的粗略距离;在每个时间距离帧数据的目标距离范围内搜索可进一步提高目标距离估计精度,有利于改善呼吸和心跳信号检测精度。
5.为了解决上述技术问题,本发明采用的技术方案步骤如下:
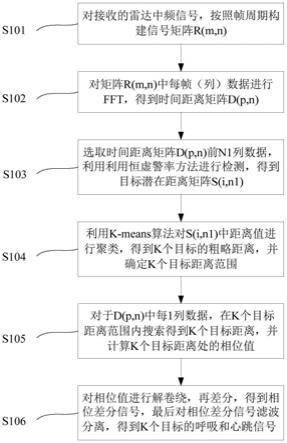
6.s101:利用fmcw雷达接收雷达中频信号,并对中频信号按照帧周期采样构建信号矩阵r(m,n),其中1≤m≤m、1≤n≤n,m为每帧采样的点数,n为帧数;
7.s102:对信号矩阵r(m,n)的每帧或每列数据分别进行fft变换,得到时间距离矩阵d(p,n),其中1≤p≤p,p为fft点数;
8.s103:选取时间距离矩阵d(p,n)的前n1列数据,利用恒虚警率方法进行检测,得到目标潜在距离矩阵s(i,n1),其中1≤i≤max(l(n1)),1≤n1≤n1,l(n1)为第n1列中检测出的目标数量;
9.s104:利用k-means算法对目标潜在距离矩阵s(i,n1)中目标距离值进行聚类,得到k个目标的粗略距离s1(k),其中1≤k≤k,k为先验目标数量,并确定k个目标距离范围为sd(k)=[s1(k)-δr/2,s1(k)+δr/2],δr为距离范围大小;
[0010]
s105:在k个目标距离范围sd(k)内,对时间距离矩阵d(p,n)的每一列数据搜索峰值,得到k个目标距离s2(k,n),并计算s2(k,n)处的相位值
[0011]
s106:对相位值进行解卷绕得到再对进行差分,得到相位差分信号,最后对相位差分信号滤波分离,得到k个目标的呼吸和心跳信号。
[0012]
进一步地,步骤s103中,利用恒虚警率方法进行检测,具体如下:
[0013]
s201:对时间距离矩阵d(p,n)的前n1列数据取其模值的平方,得到d1(p,n1)=|d(p,n1)|2;
[0014]
s202:选择ca-cfar检测器作为恒虚警率检测器,将d1(p,n1)中第1列数据作为检测器的输入,得到该列中目标数量l(1),并记录下目标距离cs1(i)(1≤i≤l(1)),遍历n1列数据,得到目标潜在距离矩阵:
[0015][0016]
进一步地,步骤s104中利用k-means算法对目标潜在距离矩阵s(i,n1)中目标距离值进行聚类,具体如下:
[0017]
s301:对于矩阵s(i,n1),选取所有非0距离值,按列数顺序排列,构成一个一维距离数据st(ki),其中1≤ki≤n2,为n1列中检测出的目标总数;
[0018]
s302:选择欧式距离作为类间距离度量标准,利用k-means算法对st(ki)进行聚类,得到k个目标的粗略距离s1(k)。
[0019]
进一步地,步骤s105的具体过程如下:
[0020]
s401:对d(p,n)每列数据取模,得到d2(p,n)=|d(p,n)|;
[0021]
s402:对于d2(p,n)的每列数据,在k个目标距离范围sd(k)内搜索峰值,得到该列中的目标距离:
[0022]
s403:计算目标距离处的相位值:其中,real(g)表示取实部,imag(g)表示取虚部,arctan(g)表示反正切函数,结果范围为[-π,π]。
[0023]
步骤s106中,得到k个目标的呼吸和心跳信号的具体步骤如下:
[0024]
s501:对目标相位进行解卷绕如下:
[0025][0026]
s502:对解卷绕后相位进行差分,如下:
[0027]
s503:利用带通滤波器对进行滤波,得到k个目标的呼吸和心跳信号。
[0028]
与现有技术相比,本发明的有益效果包括:
[0029]
1.利用恒虚警率检测技术和k-means聚类算法相结合,对少量时间距离帧数据进行处理,可有效克服目标附近物体和目标其它部位产生的干扰杂波,快速获取多个目标的粗略距离;
[0030]
2.利用多个目标粗略距离构建多个距离范围,在多个距离范围内搜索可提高多目标距离估计精度,改善多目标呼吸和心跳信号的检测精度。
附图说明
[0031]
图1是本发明提供的一种用于fmcw雷达的多目标呼吸和心跳信号检测方法流程示意图;
[0032]
图2为原始雷达中频信号矩阵;
[0033]
图3为雷达中频信号的时间距离矩阵;
[0034]
图4为利用恒虚警率技术对时间距离矩阵的前100列数据进行检测的结果;
[0035]
图5为检测出的两个目标距离处的相位差分信号;
[0036]
图6为目标1的呼吸和心跳信号;
[0037]
图7为目标2的呼吸和心跳信号。
具体实施方式
[0038]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
[0039]
本发明提供了一种用于fmcw雷达的多目标呼吸和心跳信号检测方法。请参考图1,图1是本发明方法的流程示意图;方法包括以下步骤:
[0040]
s101:利用fmcw雷达接收雷达中频信号,并对中频信号按照帧周期采样构建信号矩阵r(m,n),其中1≤m≤m、1≤n≤n,m为每帧采样的点数,n为帧数;
[0041]
请参考图2,图2是原始雷达中频信号矩阵r(m,n);以该矩阵来说具体说明本发明方案。
[0042]
两个测试目标分别位于fmcw雷达正前方0.7m和1.3m处,利用fmcw雷达进行测试,其中每帧采样点数为100,采样率为2mhz,对应的快时间长度为50us,帧周期为0.05s,帧数为400,对应的慢时间长度为20s,由此得到100
×
400的原始中频信号矩阵r(m,n),如图2所示。
[0043]
s102:对信号矩阵r(m,n)的每帧或每列数据分别进行fft变换,得到时间距离矩阵d(p,n),其中1≤p≤p,p为fft点数;
[0044]
具体的,在本实施例中,对矩阵r(m,n)中每列分别进行128点fft,得到128
×
400的时间距离矩阵d(m,n),请参考图3,图3是雷达中频信号的时间距离矩阵;
[0045]
s103:选取时间距离矩阵d(p,n)的前n1列数据,利用恒虚警率方法进行检测,得到目标潜在距离矩阵s(i,n1),其中1≤i≤max(l(n1)),1≤n1≤n1,l(n1)为第n1列中检测出的目标数量;
[0046]
步骤s103中,利用恒虚警率方法进行检测,具体如下:
[0047]
s201:对时间距离矩阵d(p,n)的前n1列数据取其模值的平方,得到d1(p,n1)=|d(p,n1)|2;
[0048]
s202:选择ca-cfar检测器作为恒虚警率检测器,将d1(p,n1)中第1列数据作为检测器的输入,得到该列中目标数量l(1),并记录下目标距离cs1(i)(1≤i≤l(1)),遍历n1列数据,得到目标潜在距离矩阵:
[0049]
[0050]
具体的,在本实施例中,选取d(p,n)的前100列数据,分别利用(恒虚警率检测器)ca-cfar技术进行检测,结果如图4所示,其中第35列数据的检测示意图如图4(a)所示,该列中检测的两个目标距离分别为0.74m和1.31m;100列数据的目标潜在距离值如图4(b)所示;
[0051]
s104:利用k-means算法对目标潜在距离矩阵s(i,n1)中目标距离值进行聚类,得到k个目标的粗略距离s1(k),其中1≤k≤k,k为先验目标数量,并确定k个目标距离范围为sd(k)=[s1(k)-δr/2,s1(k)+δr/2],δr为距离范围大小;
[0052]
步骤s104中利用k-means算法对目标潜在距离矩阵s(i,n1)中目标距离值进行聚类,具体如下:
[0053]
s301:对于矩阵s(i,n1),选取所有非0距离值,按列数顺序排列,构成一个一维距离数据st(ki),其中1≤ki≤n2,为n1列中检测出的目标总数;
[0054]
s302:选择欧式距离作为类间距离度量标准,利用k-means算法对st(ki)进行聚类,得到k个目标的粗略距离s1(k)。
[0055]
具体的,在本实施例中,利用k-means算法对目标潜在距离值进行聚类,得到两个目标粗略距离分别为0.74m和1.34m,并确定两个目标距离范围分别为[0.57m 0.91m]和[1.17m 1.51m],其中距离范围大小为0.34m。
[0056]
s105:在k个目标距离范围sd(k)内,对时间距离矩阵d(p,n)的每一列数据搜索峰值,得到k个目标距离s2(k,n),并计算s2(k,n)处的相位值
[0057]
步骤s105的具体过程如下:
[0058]
s401:对d(p,n)每列数据取模,得到d2(p,n)=|d(p,n)|;
[0059]
s402:对于d2(p,n)的每列数据,在k个目标距离范围sd(k)内搜索峰值,得到该列中的目标距离:
[0060]
s403:计算目标距离处的相位值:其中,real(g)表示取实部,imag(g)表示取虚部,arctan(g)表示反正切函数,结果范围为[-π,π]。
[0061]
具体的,在本实施例中,对d(p,n)的每列数据,在两个目标距离范围内搜索峰值,并计算两个峰值处的相位值;
[0062]
s106:对相位值进行解卷绕得到再对进行差分,得到相位差分信号,最后对相位差分信号滤波分离,得到k个目标的呼吸和心跳信号。
[0063]
步骤s106中,得到k个目标的呼吸和心跳信号的具体步骤如下:
[0064]
s501:对目标相位进行解卷绕如下:
[0065][0066]
s502:对解卷绕后相位进行差分,如下:
[0067]
s503:利用带通滤波器对进行滤波,得到k个目标的呼吸和心跳信号。
[0068]
具体的,在本实施例中,对两个峰值处的相位进行解卷绕和差分,得到的相位差分
信号如图5所示,其中图5(a)为目标1(0.74m附近)的相位差分信号,图5(b)为目标2(1.34m附近)的相位差分信号;
[0069]
设计两个iir带通滤波器,通带分别[0.1hz 0.7hz]和[0.9hz 2.0hz],分别对两个目标的相位差分信号进行滤波,得到目标1的呼吸信号和心跳信号分别如图6(a)和6(b)所示,目标2的呼吸信号和心跳信号分别如图7(a)和7(b)所示。
[0070]
在利用fmcw雷达检测过程中,同时利用接触式脉搏传感器测量两个目标的心跳频率,并通过人工计数方式测量两个目标的呼吸频率,作为参考呼吸和心跳频率。
[0071]
参考值和雷达检测值如表1所示。从表1中可看出,本发明方法测量结果与参考值之间误差较小,具有较高的检测精度。
[0072]
表1雷达检测值与参考值
[0073][0074]
应理解,上述实施例中各步骤的序号的大小并不意味着执行顺序的先后,各过程的执行顺序应以其功能和内在逻辑确定,而不应对本技术实施例的实施过程构成任何限定。
[0075]
本发明的有益效果是:
[0076]
1.利用恒虚警率检测技术和k-means聚类算法相结合,对少量时间距离帧数据进行处理,可有效克服目标附近物体和目标其它部位产生的干扰杂波,快速获取多个目标的粗略距离;
[0077]
2.利用多个目标粗略距离构建多个距离范围,在多个距离范围内搜索可提高多目标距离估计精度,改善多目标呼吸和心跳信号的检测精度。
[0078]
以上所述本发明的具体实施方式,并不构成对本发明保护范围的限定。任何根据本发明的技术构思所做出的各种其他相应的改变与变形,均应包含在本发明权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1