超声探头的夹持装置及机器人的制作方法
1.本实用新型涉及医疗器械技术领域,特别涉及一种超声探头的夹持装置及机器人。
背景技术:
2.医疗器械夹持装置是指直接或者间接用于人体的仪器、设备。随着社会的进步,越来越多的医疗器械夹持装置出现在人们的视线中,各种优良的器械层出不穷,给人们的生活提供了极大便利。
3.但是,一般医疗器械的超声探头的夹持装置在使用过程中遇到凹凸不平的皮肤时,很容易产生相当大的阻力,使超声探头的夹持装置无法正常的工作,而且一般的超声探头的夹持装置与皮肤之间的接触为刚性接触,从而使得用户体验极差。
技术实现要素:
4.本实用新型的主要目的是提出一种超声探头的夹持装置,旨在解决以上背景技术所提出的问题。
5.为实现上述目的,本实用新型提出一种超声探头的夹持装置,该超声探头的夹持装置包括夹持座,所述夹持座至少一侧设有用于与皮肤接触的滚动部件,所述滚动部件与所述夹持座转动连接。
6.优选地,所述夹持座包括基座、设置在所述基座一侧的固定座和两个设于所述基座上、用于与所述滚动部件转动连接的连接板。
7.优选地,所述滚动部件包括两个分别设于所述连接板上的轴承座,两个所述轴承座之间设有转轴,所述转轴上套设有滚筒。
8.优选地,所述基座上设有直线模组和位于所述直线模组一侧的复位组件,所述固定座上对应所述直线模组设有直线滑槽。
9.优选地,所述复位组件包括凸设于所述基座上的安装块,所述安装块上设有滑柱,所述滑柱上套设有第一弹性件,所述第一弹性件的上端设有与其抵持的滑块,所述滑块连接于所述固定座上。
10.优选地,所述基座包括底座、设于所述底座上的第一夹持板和设于所述第一夹持板一侧并与所述第一夹持板连接的第二夹持板,所述第一夹持板与所述第二夹持板之间设有容纳腔。
11.优选地,所述所述底座包括安装架、设于所述安装架上的第二弹性件和罩设于所述安装架上的外壳,所述第二弹性件一端与所述安装架抵接且另一端与所述连接板抵接。
12.优选地,所述安装架的一端面上设有安装柱,所述安装柱上套设有轴承,所述安装架的另一端面上设有限位板,且所述限位板与所述安装柱相对设置。
13.优选地,所述安装柱包括两个相对设置的涨紧部,两个所述涨紧部之间具有缝隙,且两个所述涨紧部沿垂直所述安装架的方向延伸。
14.本实用新型进一步提出一种机器人,该机器人包括前述各实施例所记载的超声探头的夹持装置,所述超声探头的夹持装置包括夹持座,所述夹持座至少一侧设有用于与皮肤接触的滚动部件,所述滚动部件与所述夹持座转动连接。
15.本实用新型技术方案的有益效果在于:本超声探头的夹持装置包括夹持座,夹持座至少一侧设有用于与皮肤接触的滚动部件,滚动部件与夹持座转动连接。本实用新型提出的超声探头的夹持装置的滚动部件与皮肤接触是柔性接触的,而且在使用过程中遇到凹凸不平的皮肤时,滚动部件能有效的越过凹凸不平的皮肤,并且还能适当压平皮肤,使得被夹持的仪器能平滑的经过皮肤,不会对皮肤产生损伤。
附图说明
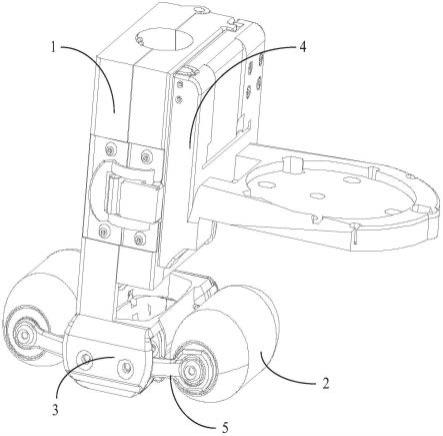
16.图1为本实用新型超声探头的夹持装置的结构示意图;
17.图2为本实用新型超声探头的夹持装置的爆炸结构示意图;
18.图3为本实用新型超声探头的夹持装置的安装架的爆炸结构示意图;
19.图4为本实用新型超声探头的夹持装置的第二夹持板的结构示意图。
具体实施方式
20.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的方案进行清楚完整的描述,显然,所描述的实施例仅是本实用新型中的一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
21.本实用新型提出一种超声探头的夹持装置,参照图1和图2,该超声探头的夹持装置包括夹持座1,夹持座1至少一侧设有用于与皮肤接触的滚动部件2,滚动部件2与夹持座1转动连接。
22.可以看出来的是,本实用新型提出的超声探头的夹持装置的应用范围极其广泛,不仅仅是用于扫查探测乳腺,还能作用在人体皮肤上的扫查,以及多方面的应用,并且,滚动部件2在遇到凹凸不平的阻碍时,还可以压平凹凸不平的障碍,使得扫查仪器在扫查过程中更为精准的得到数据。
23.本实用新型技术方案中的超声探头的夹持装置包括夹持座1,夹持座1至少一侧设有用于与皮肤接触的滚动部件2,滚动部件2与夹持座1转动连接。作为优设夹持座1为竖直放置的支架结构,夹持座1固定不动,滚动部件2可以根据受力大小来自由转动,以夹持座1作为设计基础,滚动部件2在遇到凹凸不平的皮肤时可以适当压平皮肤,夹持座1的主要作用是方便探测仪器安装固定,此时探测仪器可以正确的获得探测数据,不会产生过大的误差。
24.本实用新型提出的超声探头的夹持装置的滚动部件2为圆柱形结构,方便滚动,且滚动部件2与皮肤接触是柔性接触的,而且在使用过程中遇到凹凸不平的皮肤时,滚动部件2能有效的越过凹凸不平的皮肤,并且还能适当压平皮肤,使得被夹持的仪器能平滑的经过皮肤,不会对皮肤产生损伤。
25.在一较佳实施例中,参照图1和图2,该夹持座1包括基座3、设置在基座3一侧的固定座4和两个设于基座3上、用于与滚动部件2转动连接的连接板5。夹持座1是由基座3和设
置在基座3的一侧的固定座4以及与滚动部件2相对应设置的连接板5组成,其中以基座3为基础,固定座4以及连接板5设置在基座3上,可以看出的是固定座4的作用是与机器人机器臂固定连接,连接板5是一个连接件,方便与滚动部件2连接,连接板5与滚动部件2上的轴承相抵接,使得连接板5和滚动部件2之间连接处不会过多的磨损,导致工件的寿命不长,这样有利于节约物力的消耗。
26.在一较佳实施例中,参照图2,该滚动部件2包括两个分别设于连接板5上的轴承座21,两个轴承座21之间设有转轴22,转轴22上套设有滚筒23。可以看的出的是,滚筒23是由轴承座21和滚筒23组成的,轴承座21又包括转轴22,轴承和挡片组成,作为优选其中滚筒23的表面材质为柔性材料组成,这样与肌肤接触时,不会对皮肤产生损伤,滚筒23上的轴承以及挡片更多的作用是保护元件,减少劳损,固定轴承不会变形,连接板5与滚筒23通过轴承连接,目的就是保持零部件的使用寿命,减少劳损。
27.在一较佳实施例中,参考图1和2,该基座3上设有直线模组31和位于直线模组31一侧的复位组件32,且固定座4上对应直线模组31设有直线滑槽33。可以看得出来,基座3可以转动,固定座4与基座3通过滑动模组滑动连接,作为优选,本实用新型的固定座4是可以移动的,在固定座4上设置有直线滑槽33,在基座3上设置有直线模组31,固定座4可沿竖直方向在基座3上滑动。
28.在一较佳实施例中,参考图2和4,该复位组件32包括凸设于基座3上的安装块321,在安装块321上设有滑柱322,滑柱322上套设有第一弹性件323,并且第一弹性件323的上端设有与其抵持的滑块324,滑块324连接于固定座4上。显而易见的是,复位组件32是由安装块321、滑柱322、第一弹性件323和滑块324组成,以安装块321为基础,在安装块321上设置有滑柱322,第一弹性件323套设在滑柱322上,在滑柱322的上方还设置有滑块324,滑块324在滑柱322上滑动,通过弹性件复位,完成一套转动连接。作为优选,本实用新型的第一弹性件323采用的是弹簧,滑块324滑动之后,由弹簧复位。
29.在一较佳实施例中,参照图1和图2,其中基座3包括底座34、设于底座34上的第一夹持板35和设于第一夹持板35一侧并与第一夹持板35连接的第二夹持板36,第一夹持板35与第二夹持板36之间设有容纳腔。可以看出基座3其实是由底座34、第一夹持板35和第二夹持板36组成的,其中,第一夹持板35和第二夹持部36之间有个腔体,作为优选,第一夹持板35和第二夹持板36一端是通过卡扣的方式连接的,另一端有固定销,可以相对打开、闭合的,当扫查仪器需要装进这个超声探头的夹持装置时,打开夹持板上的卡扣,将扫查仪器插入夹持板中间的腔体,然后闭合夹持板,这样就完成了扫查仪器的装载程序,同样,需要取出扫查仪器时,打开夹持板,再将扫查仪器取出,然后闭合夹持板,完成扫查仪器的取出步骤。
30.在一较佳实施例中,参照图1和图2,该底座34包括安装架341、设于安装架341上的第二弹性件342和罩设于安装架341上的外壳343,第二弹性件342一端与安装架341抵接且另一端与连接板5抵接。同样的可以知道的是,底座34是由多个部分组成,以安装架341为基础,安装一个第二弹性件342,然后再就是安装其上的外壳343,作为优选,本实用新型采用的是发条弹簧,发条弹簧是用细长弹簧材料,绕制成平面螺旋线形的弹簧,弹簧一端固定,另一端作用扭矩后,材料受弯曲力矩,产生弯曲弹性变形,因而弹簧在自身平面内产生扭转,其变形角的大小与扭矩成正比,发条弹簧的卷绕成形比较简单,它的刚度较小,一般在
静载荷下工作,由于卷绕圈数可以很多,变形角大,具有在较小体积内储存较多的能量的特点。作为优选,本实用新型的外壳343的固定方式是采用卡持固定的,通过卡槽和卡扣卡持在底座34上,方便拆卸,另外第二弹性件342的选择根据实际工艺而定,在此不做过多的限定,以免产生等效结构变化。
31.在一较佳实施例中,参照图2和图3,该安装架341的一端面上设有安装柱344,安装柱344上套设有轴承345,安装架341的另一端面上设有限位板346,且限位板346与安装柱344相对设置。可以看出的是,安装架341是由多部分组成,以安装柱344为基础,一端面套设有轴承345,且安装柱344的另一端面还设置有限位板346。作为一个完整的安装架341,其上设置的安装柱344是方便安装第二弹性件342的,为了避免磨损,本实用新型还设置了轴承345,另外限位板346的主要作用是将安装架341固定在底座34上,避免安装架341的位置出现偏移。
32.在一较佳实施例中,参照图2和图3,该安装柱344包括两个相对设置的涨紧部,两个涨紧部之间具有缝隙,且两个涨紧部沿垂直所述安装架341的方向延伸。很容易看出的是,安装柱344是由第一涨紧部347和第二涨紧部348组成,其中,第一涨紧部347和第二涨紧部348之间形成缝隙。作为优选,本实用新型的安装柱344是可活动的,安装柱344中间存在缝隙,第二弹性件342在插入过程中,缝隙可以缩小,待第二弹性件342完全插入,缝隙张开,固定第二弹性件342的位置,使得第二弹性件342不会因受力产生位置偏差,保证工件的完美运行。
33.在一较佳实施例中,参照图1和图2,固定座4上设置有若干个安装孔,安装孔用于与机器人的机械臂固定连接。在固定座4上设置安装孔的目的是方便与机器人的机械臂连接,作为优选,本实用新型的安装孔采用的是螺纹孔,通过螺钉使机器人机械臂与超声探头的夹持装置固定连接,具体采用哪种方式根据实际工艺需求而定。
34.本实用新型还提出一种机器人包括以上实施例任一项的超声探头的夹持装置,该超声探头的夹持装置的具体结构参照上述实施例,由于本机器人采用了上述所有实施例的所有技术方案,因此至少具有上述实施例的技术方案所带来的全部技术效果,在此不再一一赘述。
35.以上所述的仅为本实用新型的部分或优选实施例,无论是文字还是附图都不能因此限制本实用新型保护的范围,凡是在与本实用新型一个整体的构思下,利用本实用新型说明书及附图内容所作的等效结构变换,或直接/间接运用在其他相关的技术领域均包括在本实用新型保护的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1