升降支脚、机架及手术机器人的制作方法
1.本实用新型涉及机架支撑技术领域,特别是指一种升降支脚、机架及手术机器人。
背景技术:
2.目前,手术机器人在骨外科、神经外科、腹腔镜外科以及血管介入治疗等科室应用广泛,其主要产品有:外科手术机器人、放疗机器人、骨科机器人、血管介入机器人、腔镜机器人等。
3.手术机器人在进行手术时,对其机体的稳定性要求特别高。当手术机器人在不完全平整的地面进行手术时,如果机体固定不够平稳,就会使手术机器人在手术过程中产生抖动,影响手术精度。
技术实现要素:
4.本实用新型要解决的技术问题是提供一种升降支脚、机架及手术机器人,以实现在地面不平整的情况下使机体平稳固定的目的。
5.为解决上述技术问题,本实用新型提供技术方案如下:
6.一方面,一种升降支脚,包括推杆电机和球铰连接在推杆电机末端的脚垫,其中:
7.所述升降支脚还包括推杆支撑座和位于所述推杆支撑座下方的推杆套筒,所述推杆套筒内设有推杆延长杆;
8.所述推杆支撑座为中空腔体,所述推杆支撑座的两侧设有开口;
9.所述推杆电机位于所述推杆支撑座内,所述推杆电机的上端铰接在所述推杆支撑座的顶部,所述推杆电机的输出轴铰接所述推杆延长杆的上端;
10.所述推杆延长杆的下端连接有连杆,所述连杆的末端球铰连接所述脚垫。
11.进一步的,所述连杆的末端设有球头,所述脚垫上设有与所述球头相配合的球窝。
12.进一步的,所述推杆延长杆的下端设有带内螺纹的盲孔,所述连杆的上部螺纹连接在所述盲孔内。
13.进一步的,所述推杆电机的输出轴和推杆延长杆的上端之间通过连接销铰接,所述推杆套筒内侧设有用于与所述连接销配合以限制推杆电机伸缩距离的挡臂。
14.进一步的,所述推杆套筒内侧在所述挡臂的下方设有无油衬套,所述推杆套筒内侧末端设有弹性挡圈。
15.进一步的,所述推杆套筒的上端外缘设有环形凸台,所述环形凸台上设有用于连接所述推杆支撑座的第一螺钉孔和用于连接机架底板的第二螺钉孔;
16.所述推杆支撑座的下端面上设有与所述第一螺钉孔相配合的螺钉孔。
17.另一方面,提供一种机架,包括底板,所述底板的下方设有支撑脚轮和至少三个上述的升降支脚。
18.进一步的,所述底板上设有透孔,所述推杆套筒穿设在所述透孔中。
19.再一方面,提供一种手术机器人,包括上述机架。
20.本实用新型具有以下有益效果:
21.本实用新型的升降支脚、机架及手术机器人,推杆电机的上端铰接在推杆支撑座的顶部,推杆电机的下端通过推杆延长杆和连杆球铰连接脚垫,这样通过采用双铰接的方式,能够较好的适应地面的不平整性,达到使机体平稳固定的目的;并且能够较好的实现电机的安装以及支撑力的输出,使电机的斜向撑开力更好的转化为竖向支撑力,确保支撑效果,并且减小电机的不恰当受力,增加电机的使用寿命。
附图说明
22.图1为本实用新型的升降支脚应用于机架时的结构示意图;
23.图2为图1所示升降支脚在地面平整状态下的结构示意图;
24.图3为图1所示升降支脚在地面不平整状态下的结构示意图;
25.图4为图3所示升降支脚的受力原理图;
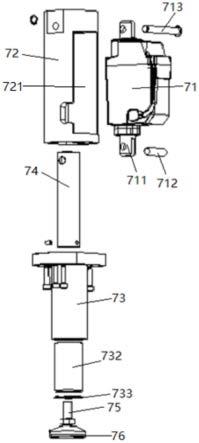
26.图5为图1所示升降支脚的分解结构示意图;
27.图6为本实用新型的手术机器人的结构示意图。
具体实施方式
28.为使本实用新型要解决的技术问题、技术方案和优点更加清楚,下面将结合附图及具体实施例进行详细描述。
29.一方面,本实用新型提供一种升降支脚,如图1-5所示,升降支脚7包括推杆电机71和球铰连接在推杆电机71末端的脚垫76,其中:
30.升降支脚7还包括推杆支撑座72和位于推杆支撑座72下方的推杆套筒73,推杆套筒73内设有推杆延长杆74;
31.推杆支撑座72为中空腔体,推杆支撑座72的两侧设有开口721;
32.推杆电机71位于推杆支撑座72内,推杆电机71的上端铰接在推杆支撑座72的顶部(具体可通过固定轴713铰接连接),推杆电机71的输出轴711铰接推杆延长杆74的上端(具体可通过连接销712铰接连接);
33.推杆延长杆74的下端连接有连杆75,连杆75的末端球铰连接脚垫76。
34.升降支脚7可以安装在机架的底板10上,底板10上可设有支撑脚轮14,使用时,操作者可通过支撑脚轮14(具体可为带刹车的万向轮,数量可以为四个)将机架移动到需要的工作地点,当到达需要的工作地点后,升降支脚7伸出,将底板10撑起,支撑脚轮14离地,仅由升降支脚7起到支撑作用,具体的,推杆电机71运转,通过推杆延长杆74推动连杆75向下移动,连杆75通过球铰带动脚垫76(具体可为吸盘式脚垫)将机架固定在地面上,在此过程中推杆电机71可自适应的进行摆动调节(图4)。
35.本实用新型的升降支脚,推杆电机的上端铰接在推杆支撑座的顶部,推杆电机的下端通过推杆延长杆和连杆球铰连接脚垫,这样通过采用双铰接的方式,能够较好的适应地面的不平整性,达到使机体平稳固定的目的;并且能够较好的实现电机的安装以及支撑力的输出,使电机的斜向撑开力更好的转化为竖向支撑力,确保支撑效果,并且减小电机的不恰当受力,增加电机的使用寿命。
36.如图2-5所示,为方便连接,连杆75的末端可以设有球头751,脚垫76上可以设有与
球头751相配合的球窝;推杆延长杆74的下端可以设有具有内螺纹的盲孔741,连杆75的上端螺纹连接在盲孔内741。同时,推杆电机71的输出轴711和推杆延长杆74之间通过连接销712铰接,推杆套筒73内侧可以设有用于与连接销712配合以限制推杆电机71伸缩距离的挡臂731,通过这种方式能够较为方便的限制推杆电机71可伸出的长度。并且,推杆套筒73内侧在挡臂731的下方可以设有无油衬套732,以降低摩擦阻力;为防止无油衬套脱落,推杆套筒73内侧末端可以设有弹性挡圈733。
37.另外,为方便安装升降支脚7,推杆套筒73的上端设有环形凸台734,环形凸台734上设有用于连接推杆支撑座72的第一螺钉孔735和用于连接底板10的第二螺钉孔736;推杆支撑座72的下端面上设有与第一螺钉孔735相配合的螺钉孔;底板10上设有与第二螺钉孔736相配合的螺钉孔,这样能较为方便的实现升降支脚7的安装和拆卸。
38.另一方面,本实用新型提供一种机架,包括底板10,底板10的下方设有支撑脚轮14和至少三个上述升降支脚7,由于升降支脚的结构与上相同,故此处不再赘述。
39.本实用新型的机架,推杆电机的上端铰接在推杆支撑座的顶部,推杆电机的下端通过推杆延长杆和连杆球铰连接脚垫,这样通过采用双铰接的方式,能够较好的适应地面的不平整性,达到使机体平稳固定的目的;并且能够较好的实现电机的安装以及支撑力的输出,使电机的斜向撑开力更好的转化为竖向支撑力,确保支撑效果,并且减小电机的不恰当受力,增加电机的使用寿命。
40.为方便安装升降支脚7,底板10上可以设有透孔(未示出),推杆套筒73穿设在透孔中;并且底板10上可以设有与第二螺钉孔736相配合的螺钉孔(未示出)。
41.再一方面,本实用新型提供一种手术机器人,包括上述的机架,由于机架的结构与上相同,故此处不再赘述。
42.本实用新型的手术机器人,推杆电机的上端铰接在推杆支撑座的顶部,推杆电机的下端通过推杆延长杆和连杆球铰连接脚垫,这样通过采用双铰接的方式,能够较好的适应地面的不平整性,达到使机体平稳固定的目的;并且能够较好的实现电机的安装以及支撑力的输出,使电机的斜向撑开力更好的转化为竖向支撑力,确保支撑效果,并且减小电机的不恰当受力,增加电机的使用寿命。
43.如图6所示,以手术机器人为膝关节手术机器为例,该手术机器人可以包括设置在机架上的箱体1,箱体1上可以设有机械臂2、显示器3、交互设备4和图像传感器(未示出),图像传感器具体可以为摄像头和/或红外线传感器等,位置可以直接固定安装在箱体1上,或是通过万向杆15架设在箱体1上;箱体1的前方可以设有控制面板5和接口板6,控制面板5上设有开关62;箱体1内可以设有计算机中心、机械臂控制器、图像导航控制器和控制板等。
44.以上所述是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型所述原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1