胶囊机器人的磁耦合控制装置及磁耦合系统
1.本实用新型涉及自动化工程技术领域,具体而言,涉及一种胶囊机器人的磁耦合控制装置及磁耦合系统。
背景技术:
2.作为人体胃肠道内的一种无创、无痛诊疗工具,无线胶囊机器人能够有效提高检查舒适性和患者耐受力,使体内胃肠道等盲区内的检查成为可能。被动胶囊机器人最初主要用于小肠内部检查,后来逐渐应用于胃部、大肠等部位。然而,被动胶囊机器人的主要特征为不可控,仅能依靠胃肠道蠕动力前进,遇到狭窄、褶皱的肠管还会发生滞留危害。而采用外磁场驱动的胶囊机器人可完全避免此类问题的产生,具有磁场调节简单、连续运动性好以及操控简便等优点,最主要的是外磁场驱动的胶囊机器人可不受机器人内部空间约束,可高度微型化,便于临床应用。
3.目前,外磁场驱动系统可分为电磁线圈驱动系统和永磁体驱动系统。电磁线圈驱动系统,由电流输入线圈产生磁力矩,具有磁场强度和频率均连续可控的特点。然而,临床应用的电磁线圈驱动系统需要庞大体积的线圈包覆人体,造价高昂,而且在操控时,需要医师掌握复杂的计算及控制方法,难度较大。永磁体驱动系统为采用安装在机械臂末端的永磁体或电磁铁,与胶囊机器人内嵌永磁体形成耦合磁力矩实现机器人的方向、位置和转速控制。然而,受限于机械臂本身固有特性,若在运动过程中遇到奇异点,会造成机械手臂产生错误动作,影响胶囊机器人的准确驱动控制。而且,机械手臂的使用同样存在着成本高昂的问题。
技术实现要素:
4.为解决上述问题,本实用新型的目的在于提供一种胶囊机器人的磁耦合控制装置及磁耦合系统,不仅能够降低外磁场驱动胶囊机器人的成本,还能灵活、简便的控制胶囊机器人在人体肠道内来去自如。
5.本实用新型的目的是通过以下技术方案实现的:
6.一方面,本实用新型提供了一种胶囊机器人的磁耦合控制装置,包括:电机、两块长条形主永磁体、控制器;两块长条形主永磁体设置在电机的输出轴上,电机由控制器进行控制;
7.电机在控制器的控制作用下,带动两块长条形的主永磁体旋转叠加而形成旋转磁场,在旋转磁场的作用下对胶囊机器人内部从永磁体产生非接触磁作用力,胶囊机器人与外部的旋转磁场同步旋转,在充满粘性液体的管道中旋转前进,实现前进与后退运动;
8.利用电机的调速功能驱动胶囊机器人,可实现胶囊机器人连续的步进调速,进行更准确的驱动控制。
9.进一步地,控制器包括单片机、电机驱动器、电机控制器、正反转按键、停止键、速度调节旋钮、七段数码管显示电路,控制器通过c语言程序对电机进行调速控制。
10.进一步地,两块长条形主永磁体为厚度方向充磁,主永磁体的截面为正方形或矩形。
11.进一步地,电机为直流电机或步进电机或伺服电机,电机的输出轴与联轴器通过紧固螺栓固定。
12.进一步地,胶囊机器人进行前行的管道内部充满医用二甲基硅油。
13.进一步地,控制器和电机均安装在手持外壳中,采用3d打印制造,数码管和主永磁体及联轴器在手持外壳外部。
14.进一步地,电机为有线或无线锂电池供电。
15.另一方面,本实用新型提供了一种胶囊机器人的磁耦合系统,包括:包括磁耦合控制装置和胶囊机器人,磁耦合控制装置为上述任一项的磁耦合控制装置。
16.进一步地,胶囊机器人采用3d打印制造,外部为螺旋表面,内部从永磁体为圆柱形或环形,从永磁体充磁方向为径向充磁。
17.本实用新型的胶囊机器人的磁耦合控制装置及磁耦合系统,电机在控制器的控制作用下,带动两块长条形的主永磁体旋转叠加而形成旋转磁场,在旋转磁场的作用下对胶囊机器人内部从永磁体产生非接触磁作用力,胶囊机器人与外部的旋转磁场同步旋转,在充满粘性液体的管道中旋转前进,实现前进与后退运动,不仅能够降低外磁场驱动胶囊机器人的成本,还能灵活、简便的控制胶囊机器人在人体肠道内来去自如,可以根据实际需要更换不同磁能积的主永磁体,控制灵活方便,成本低廉,适用于胃肠消化道的诊察工作。
附图说明
18.此处所说明的附图用来提供对本实用新型的进一步理解,构成本技术的一部分,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
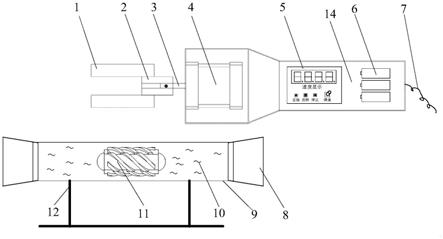
19.图1为本实用新型胶囊机器人的磁耦合系统示意图;
20.图2为本实用新型胶囊机器人的示意图;
21.图3为本实用新型胶囊机器人的磁耦合控制方法的步骤框图;
22.其中附图标记为:1
‑
主永磁体,2
‑
联轴器,3
‑
输出轴,4
‑
电机,5
‑
控制面板,6
‑
锂电池,7
‑
导线,8
‑
橡胶塞,9
‑
亚克力管,10
‑
二甲基硅油,11
‑
胶囊机器人,12
‑
支架,13
‑
从永磁体,14
‑
手持外壳。
具体实施方式
23.为了使本技术领域的人员更好地理解本实用新型方案,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分的实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本实用新型保护的范围。
24.实施例一
25.如图1
‑
2所示,本实用新型实施例的一种胶囊机器人的磁耦合控制装置,包括电机4、两块长条形主永磁体1、控制器;两块长条形主永磁体1设置在电机4的输出轴3上,电机4
由控制器进行控制;
26.电机4在控制器的控制作用下,带动两块长条形的主永磁体1旋转叠加而形成旋转磁场,在旋转磁场的作用下对胶囊机器人11内部从永磁体13产生非接触磁作用力,胶囊机器人11与外部的旋转磁场同步旋转,在充满粘性液体的管道中旋转前进,实现前进与后退运动;
27.利用电机4的调速功能驱动胶囊机器人11,可实现胶囊机器人11连续的步进调速,进行更准确的驱动控制。
28.本实用新型的胶囊机器人的磁耦合控制装置,电机4在控制器的控制作用下,带动两块长条形的主永磁体1旋转叠加而形成旋转磁场,在旋转磁场的作用下对胶囊机器人11内部从永磁体13产生非接触磁作用力,胶囊机器人11与外部的旋转磁场同步旋转,在充满粘性液体的管道中旋转前进,实现前进与后退运动,不仅能够降低外磁场驱动胶囊机器人11的成本,还能灵活、简便的控制胶囊机器人11在人体肠道内来去自如,可以根据实际需要更换不同磁能积的主永磁体1,控制灵活方便,成本低廉,适用于胃肠消化道的诊察工作。
29.其中,控制器包括单片机、电机驱动器、电机控制器、正反转按键、停止键、速度调节旋钮、七段数码管显示电路,控制器通过c语言程序对电机4进行调速控制。
30.其中,两块长条形主永磁体1为厚度方向充磁,主永磁体1的截面为正方形或矩形。
31.其中,电机4为直流电机4或步进电机4或伺服电机4,电机4的输出轴3与联轴器2通过紧固螺栓固定。
32.其中,如图1所示,胶囊机器人11进行前行的管道内部充满医用二甲基硅油10,该管道为模拟人体肠道的管道,为亚克力管9,并使用橡胶塞8将其两端封堵,该亚克力管9由下端的支架12支撑。
33.其中,控制器和电机4均安装在手持外壳14中,采用3d打印制造,数码管和主永磁体1及联轴器2在手持外壳14外部,便于观测转速变化情况和更换不同磁能积的主永磁体1。
34.其中,电机4为有线或无线锂电池6供电,可根据需要使用有线或无线方式驱动胶囊机器人11,锂电池6通过导线7充电。
35.实施例二
36.如图1
‑
2所示,本实用新型实施例的一种胶囊机器人的磁耦合系统,包括:磁耦合控制装置和胶囊机器人11,磁耦合控制装置为上述任一项的磁耦合控制装置。
37.本实用新型的胶囊机器人的磁耦合系统,电机4在控制器的控制作用下,带动两块长条形的主永磁体1旋转叠加而形成旋转磁场,在旋转磁场的作用下对胶囊机器人11内部从永磁体13产生非接触磁作用力,胶囊机器人11与外部的旋转磁场同步旋转,在充满粘性液体的管道中旋转前进,实现前进与后退运动,不仅能够降低外磁场驱动胶囊机器人11的成本,还能灵活、简便的控制胶囊机器人11在人体肠道内来去自如,可以根据实际需要更换不同磁能积的主永磁体1,控制灵活方便,成本低廉,适用于胃肠消化道的诊察工作。
38.其中,胶囊机器人11采用3d打印制造,外部为螺旋表面,内部从永磁体13为圆柱形或环形,从永磁体13充磁方向为径向充磁。
39.实施例三
40.如图3所示,本实用新型实施例的一种胶囊机器人的磁耦合控制方法,该方法包括以下步骤:
41.步骤s1:在控制器中通过控制面板5按下正转按键,电机4开始转动。此时管道内的胶囊机器人11也会随着电机4产生的旋转磁场而旋转。此时数码管显示电机4为正转和旋转速度。此时可手持控制器引导胶囊机器人11向管道目标方向前进,控制器速度与胶囊机器人11速度要保持相对一致,二者应保持一定距离。
42.步骤s2:当在控制面板5上按下停止键,电机4会停止运动,同时管道内胶囊机器人11也会停止运动,数码管保留之前的数据状态,不会改变。
43.步骤s3:当正方向旋转速度调节旋钮时,电机4速度会增加,同时管道内的胶囊机器人11也会随之加速旋转,此时的数码管示数也会跟随转速而增加,达到最大保护限定转速值后,电机4的转速不再增加。
44.步骤s4:当反方向旋转速度调节旋钮时,电机4速度会减小,同时管道内的胶囊机器人11也会随之减速旋转,此时数码管显示数值逐渐减小,随着速度调节旋钮继续旋转,达到0位后,电机4的速度不再变化。
45.步骤s5:当在控制面板5上按下反转按键时,电机4转动的方向与正向旋转相反,管道内的胶囊机器人11也会随之反方向旋转,此时数码管显示的转速值为反向旋转速度。与之前操作类似,此时可手持控制器引导胶囊机器人11向管道相反的目标方向前进,控制器速度与胶囊机器人11速度要保持相对一致,二者应保持一定距离。
46.步骤s6:当再次按下控制面板5上的正转按键时,电机4再次换向;管道内的胶囊机器人11继续变换转动方向,与此同时,数码管显示正向旋转速度值。
47.本实用新型的技术方案简单、使用方便,能够从不同角度对胶囊机器人11进行驱动控制,克服了机械手臂的奇异点,避免了庞大的电磁驱动线圈高磁场辐射和大量的电力消耗,有效节约了医疗资源,无需专业培训即可迅捷使用,为全消化道准确、快速诊治提供更加有效的医疗服务奠定基础。
48.本实用新型的技术方案通过外部主永磁体1旋转产生动态旋转磁场,带动内部安装有从永磁体13的胶囊机器人11共同旋转,通过改变外部主永磁体1的旋转速度,可以间接改变胶囊机器人11的旋转速度,进而改变胶囊机器人11的前进速度,可方便的控制胶囊机器人11启动与停止,利用主永磁体1产生的旋转磁场引导胶囊机器人11直行、后退及转弯驱动,本实用新型的技术方案操作简单,能够产生动态连续的旋转磁场。本实用新型的技术方案实用性好,可避免五自由度或六自由度机械臂的奇异点和电磁线圈驱动的庞大和复杂性等问题,通过人工手持控制器对胶囊机器人11进行引导控制,而且可以根据实际需要更换不同磁能积的主永磁体1,控制灵活方便,成本低廉,适用于胃肠消化道的诊察工作。
49.以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1