一种电切镜手柄及电切镜的制作方法
1.本实用新型涉及医疗器械技术领域,尤其涉及一种电切镜手柄,还涉及一种电切镜。
背景技术:
2.电切镜是一种临床上适用于在内窥镜直视下,其上的电极经人体自然通道到达病灶部位,利用高频设备输出能量到电极,并通过操作电极对靶组织进行切割或凝血等微创手术,常用于前列腺增生、子宫肌瘤、膀胱肿瘤等病症的手术治疗中。电切镜主要由内窥镜、手柄、鞘套组成,其中手柄是连接内窥镜、电极和鞘套的重要组件之一,手术过程中医生通过手柄来进行各种操作。
3.随着技术的发展,在电切手术中将电切镜安装在手术机器人的执行器上,让医生远程操控手术机器人,进而操作电切镜对病人实施手术治疗的应用越来越多。但是现有的电切镜手柄是按符合人体工程学的外形设计的,如专利 cn201720322051 和专利 cn201822257693 中公开的电切镜手柄,其外形结构由握柄、拇指环、滑块、手柄主体构成,握柄和拇指环都是方便人手操作所必须的部件,由于手术机器人的执行器和人手的结构差异很大,当配合手术机器人使用时,握柄和拇指环的复杂外形会导致与执行器安装不便。没有握柄和拇指环的手柄结构,可以较容易地与执行器进行安装,但这种结构的手柄不能适用于人手操作。
4.因手术机器人在使用过程中的不可控因素有导致发生故障的潜在风险,当手术机器人发生故障无法继续工作时,需要将电切镜的手柄更换为适合人手操作的手柄,改由医生操作继续完成手术。而在更换手柄时,需要将电极从适合机器人的手柄上拆卸掉,再将电极安装到适合人手操作的手柄上,由于电极是接触病人的手术执行部件,因此这样的转换过程比较麻烦和费时,且涉及到电极的拆装,对病人的危害较大。
技术实现要素:
5.为了克服上述现有技术的不足,本实用新型提供了一种电切镜手柄,还提供了一种电切镜,其一个方面解决了目前的电切镜手柄不能兼用于手术机器人和人手操作的问题。
6.本实用新型解决其技术问题所采用的技术方案为:
7.一种电切镜手柄,包括手柄主体、握柄和握环,所述握环可安装或拆离于手柄主体,所述手柄主体包括管柱以及套设于管柱的滑块,所述滑块可沿管柱的轴向滑动,所述握柄可安装或拆离于管柱,当所述握环安装于手柄主体,所述握环能够直接或间接地驱动滑块滑动。
8.作为上述技术方案的改进,所述手柄主体包括固定设于管柱的接头,所述接头的侧面开设有卡槽,所述握柄包括握柄本体以及固定设于握柄本体的卡套,所述卡套设有卡件,当所述握柄安装于管柱,所述接头插设于卡套,所述卡件插设于卡槽,所述管柱通过接
头与握柄连接,且所述卡件可向远离卡套中轴线的方向移动以退出卡槽。
9.作为上述技术方案的改进,所述卡套本身为弹性件,所述卡件固定设于卡套的内侧,当所述握柄安装于管柱,所述卡套套设于接头外部,所述卡件在卡套本身的弹力作用下插设于卡槽。
10.作为上述技术方案的改进,所述卡套开设有安装槽,所述卡件置于安装槽内,所述卡件与卡套之间设有定位弹簧,所述定位弹簧可驱使卡件向靠近卡套中轴线的方向移动。
11.作为上述技术方案的改进,所述卡件包括相互连接的卡块和受力块,所述卡块和受力块组成 l 形块,所述受力块开设有弹簧槽,所述安装槽中设有挡块,所述定位弹簧置于弹簧槽内,所述定位弹簧的一端抵接挡块,所述定位弹簧的另一端抵接弹簧槽的槽壁,所述定位弹簧可驱使卡块向靠近卡套中轴线的方向移动。
12.作为上述技术方案的改进,所述受力块的一侧固定设有拨块,所述拨块位于卡套的外部,所述拨块可带动卡块向靠近或远离卡套中轴线的方向移动。
13.作为上述技术方案的改进,所述卡件设有第一限位部,所述卡套对应设有第二限位部,所述第一限位部和第二限位部相互配合可限制卡件在安装槽内的移动范围。
14.作为上述技术方案的改进,所述第一限位部包括开设于卡件的腰型孔,所述第二限位部包括固定设于卡套的定位销,所述定位销插设于腰型孔,所述定位销可在腰型孔内滑动以使卡件向靠近或远离卡套中轴线的方向移动。
15.作为上述技术方案的改进,所述接头包覆管柱的一部分,所述卡套为 u 形套,所述 u 形套的开口宽度大于管柱的直径,所述 u 形套的一端与握柄本体连接。
16.作为上述技术方案的改进,所述 u 形套的内侧设有第一定位面,所述接头的侧面对应设有第二定位面,当所述握柄安装于管柱,所述u 形套套设于接头,所述第一定位面和第二定位面触接以限制卡套相对于接头的转动。
17.作为上述技术方案的改进,所述手柄主体还包括推动架和复位件,所述推动架与滑块连接,所述握环可旋转地连接于推动架,所述握环可通过推动架驱动滑块滑动,所述复位件可驱动滑块向远离握柄安装位置的方向滑动。
18.作为上述技术方案的改进,所述手柄主体还包括固定架,所述固定架的一端和推动架的一端通过第一连接轴铰接,所述复位件为扭簧,所述扭簧套设于第一连接轴,所述扭簧的两端分别连接固定架和推动架,所述固定架的另一端与管柱铰接,所述推动架的中部与滑块铰接,所述握环可通过螺纹连接于推动架的另一端。
19.作为上述技术方案的改进,所述推动架与滑块固定连接,所述复位件为弹簧,所述弹簧套设于管柱,所述弹簧的一端连接滑块。
20.作为上述技术方案的改进,所述握环通过连接锁与推动架连接,所述连接锁的一端开设有安装孔,所述安装孔的内壁沿周向开设有第一环槽,所述握环的一侧设有第二连接轴,所述安装孔的直径大于第二连接轴的直径,所述第二连接轴外卡设有卡簧,所述第二连接轴插设于安装孔,所述卡簧插设于第一环槽,所述握环可绕安装孔的轴向转动,所述连接锁的另一端设有螺柱,所述推动架对应设有螺孔,所述螺柱可螺接于螺孔。
21.一种电切镜,包括内窥镜组件、鞘套组件、电极以及上述的电切镜手柄,所述鞘套组件和内窥镜组件分别安装于管柱的两端,所述电极的一端与滑块连接,所述滑块能够沿管柱的轴向滑动以带动电极移动。
22.本实用新型其中一方面的有益效果有:
23.根据本公开的一方面,本电切镜采用本电切镜手柄,由于本电切镜手柄的握柄和握环均可以安装或拆离于手柄主体,根据本电切镜的使用方法,可根据使用需求,将电切镜手柄组装成适用于手术机器人和人手的两种不同状态,当需要使用手术机器人操作电切镜进行手术时,可以将握柄和握环不组装到手柄主体,便于电切镜手柄与手术机器人的执行器进行组装,也避免握柄和握环的复杂外形干扰手术机器人的动作,便于执行器对电切镜进行操控;当手术过程中,手术机器人发生故障或发生其他状况,需要换由医生操作电切镜继续完成手术时,可将电切镜手柄与手术机器人的执行器拆离,然后将握柄和握环组装到手柄主体,以适应于人手操作电切镜。在这种转换过程中,不用拆装电极,因此转换过程更加简便、高效、安全,可极大的降低手术的风险,保障病人的安全。
附图说明
24.下面结合附图及具体实施例对本实用新型作进一步说明,其中:
25.图 1 是本实用新型的其中一个实施例中用于人手操作的电切镜的侧面结构示意图;
26.图 2 是本实用新型的其中一个实施例中用于手术机器人操作的电切镜的侧面结构示意图;
27.图 3 是本实用新型的其中一个实施例中电切镜手柄的立体结构示意图;
28.图 4 是本实用新型的其中一个实施例中电切镜手柄的侧面结构示意图;
29.图 5 是本实用新型的其中一个实施例中手柄主体的立体结构示意图;
30.图 6 是本实用新型的其中一个实施例中握柄的侧面结构示意图;
31.图 7 是图 6 中 a-a 处的剖面结构示意图;
32.图 8 是本实用新型的其中一个实施例中握环的剖面结构示意图。
具体实施方式
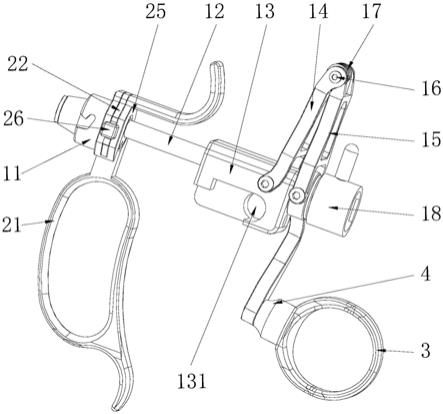
33.参见图 1 和图 2,本实用新型公开了一种电切镜,包括内窥镜组件 5、鞘套组件 6、电极 7 以及下述的电切镜手柄,所述鞘套组件 6和内窥镜组件 5 分别安装于管柱 12 的前后两端,所述电极 7 的后端与滑块 13 连接,所述滑块 13 能够沿管柱 12 的轴向滑动以带动电极7 前后移动。滑块 13 设有电极安装圆孔 131,电极 7 的后端安装于电极安装圆孔 131 中。
34.本实用新型还公开了一种上述电切镜的使用方法,具体包括以下步骤:
35.当由手术机器人操作所述电切镜时,所述握柄 2 和握环 3 均处于脱离于手柄主体 1 的状态,将所述手柄主体 1 安装于手术机器人的执行器,由所述执行器驱动滑块 13 沿管柱 12 的轴向滑动,以带动电极7 前后移动;
36.当由人手操作所述电切镜时,所述握柄 2 和握环 3 均处于安装在手柄主体 1 的状态,由人手操作握环 3 以驱动滑块 13 沿管柱 12 轴向滑动,以带动电极 7 前后移动。
37.再参见图 3-图 5,本实用新型还公开了一种电切镜手柄,包括手柄主体 1、握柄 2 和握环 3,所述握环 3 可安装或拆离于手柄主体 1,所述手柄主体 1 包括管柱 12 以
及套设于管柱 12 的滑块 13,所述滑块 13 可沿管柱 12 的轴向滑动,所述握柄 2 可安装或拆离于管柱 12,当所述握环 3 安装于手柄主体 1,所述握环 3 能够直接或间接地驱动滑块 13 滑动。
38.具体的,本电切镜采用本电切镜手柄,由于本电切镜手柄的握柄2 和握环 3 均可以安装或拆离于手柄主体 1,根据本电切镜的使用方法,可根据使用需求,将电切镜手柄组装成适用于手术机器人和人手的两种不同状态,当需要使用手术机器人操作电切镜进行手术时,可以将握柄 2 和握环 3 不组装到手柄主体 1,便于电切镜手柄与手术机器人的执行器进行组装,也避免握柄 2 和握环 3 的复杂外形干扰手术机器人的动作,便于执行器对电切镜进行操控;当手术过程中,手术机器人发生故障或发生其他状况,需要换由医生操作电切镜继续完成手术时,可将电切镜手柄与手术机器人的执行器拆离,然后将握柄 2和握环 3 组装到手柄主体 1,以适应于人手操作电切镜。在这种转换过程中,不用拆装电极,因此转换过程更加简便、高效、安全,可极大的降低手术的风险,保障病人的安全。
39.进一步参见图 3-图 5,握柄 2 可拆卸的具体结构为,所述手柄主体 1 包括固定设于管柱 12 的接头 11,所述接头 11 的侧面开设有卡槽 112,所述握柄 2 包括握柄本体 21 以及固定设于握柄本体21 的卡套 25,所述卡套 25 设有卡件 22,当所述握柄 2 安装于管柱 12,所述接头 11 插设于卡套 25,所述卡件 22 插设于卡槽 112,也就是管柱12 通过接头 11 与握柄 2 连接,且所述卡件 22 可向远离卡套 25 中轴线的方向移动以退出卡槽 112。这样,卡套 25 套在接头 11,卡件 22插入卡槽 112,就能实现握柄 2 的固定安装;将卡件 22 退出卡槽 112,并将接头 11 抽离卡套 25,就能实现握柄 2 的拆卸。拆装操作简单,便于使用。
40.具体的,实现卡件 22 可移动的结构有多种,例如,卡套 25 本身为弹性件,卡件 22 固定设于卡套 25 的内侧,当所述握柄 2 安装于管柱 12,卡套 25 套设于接头 11 外部,卡件 22 在卡套 25 本身的弹力作用下插设于卡槽 112。当需要将握柄 2 拆卸时,只需要向卡套 25的外侧掰动卡套 25,使卡件 22 脱离卡槽 112,即可以将卡套 25 与接头 11 分离,操作简单。其中,“卡套 25 的内侧”是指靠近卡套 25中轴线的那一侧,是会和接头 11 接触的那一侧,“卡套 25 的外侧”是指远离卡套 25 中轴线的那一侧。
41.在本实施例中,实现卡件 22 可移动的结构为,所述卡套 25 开设有安装槽,所述卡件 22 置于安装槽内,所述卡件 22 与卡套 25 之间设有定位弹簧 23,所述定位弹簧 23 可驱使卡件 22 向靠近卡套 25 中轴线的方向移动。当卡套 25 套设于接头 11 外部,卡件 22 在定位弹簧 23 的弹力下插入卡槽 112,卡接牢固,使用安全。
42.参见图 6 和图 7,实现卡件 22 可移动的具体结构为,所述卡件22 包括相互连接的卡块 223 和受力块 222,所述卡块 223 和受力块222 组成 l 形块,所述受力块 222 开设有弹簧槽,所述安装槽中设有挡块 27,所述定位弹簧 23 置于弹簧槽内,所述定位弹簧 23 的一端抵接挡块 27,所述定位弹簧 23 的另一端抵接弹簧槽的槽壁,所述定位弹簧 23 可驱使卡块 223 向靠近卡套 25 中轴线的方向移动。握柄 2在未安装的自然状态下,由于定位弹簧 23 的弹力作用,卡块 223 的一部分位于卡套 25 的内孔中,卡套 25 的内孔即为卡套 25 所包围的空间,为供接头 11 插设安装的孔。
43.进一步的,为了便于在需要拆掉握柄 2 时拨动卡件 22,所述受力块 222 的一侧固定设有拨块 26,所述拨块 26 位于卡套 25 的外部,拨动拨块 26,拨块 26 可以带动卡
块 223 向靠近或远离卡套 25 中轴线的方向移动。
44.而且,为了限制卡件 22 的移动的范围,所述卡件 22 设有第一限位部,所述卡套 25 对应设有第二限位部,所述第一限位部和第二限位部相互配合可限制卡件 22 在安装槽内的移动范围。例如,第一限位部和第二限位部均为限位块或者限位面,卡件22 移动到靠近或远离卡套 25 中轴线的极限位置,第一限位部会和第二限位部抵接,以此限定卡件 22 的移动范围。
45.在本实施例中,所述第一限位部包括开设于卡件 22 的腰型孔221,所述第二限位部包括固定设于卡套 25 的定位销 24,所述定位销 24 插设于腰型孔 221,定位销 24 与腰型孔 221 为间隙配合,所述定位销 24 可在腰型孔 221 内滑动以使卡件 22 向靠近或远离卡套 25中轴线的方向移动,结构简单,且限位效果好。本实施例中,腰型孔221 和定位销 24 均设有两个,两个腰型孔 221 相互平行,两个定位销 24 固定设于安装槽的侧壁。腰型孔 221 和定位销 24 的数量为两个,可以避免卡件 22 在安装槽内旋转,保证卡件 22 的移动方向。
46.具体的,所述接头 11 包覆管柱 12 的一部分,具体为接头 11 包覆管柱 12 的前端,接头 11 后侧的管柱 12 裸露,滑块 13 套设于管柱12,滑块 13 位于接头 11 的后方。所述卡套 25 为 u 形套,所述 u 形套的开口宽度大于管柱 12 的直径,所述 u 形套的一端与握柄本体 21连接。在需要拆掉握柄 2 时,将卡件 22 退出卡槽 112,将 u 形套顺着管柱 12 的轴向并向后移动到脱离接头 11,之后裸露的管柱 12 就可以从 u 形套的开口取出,方便握柄 2 的拆卸。
47.进一步的,为了防止 u 形套相对接头 11 转动,所述 u 形套的内侧设有第一定位面251,所述接头11的侧面对应设有第二定位面111,第二定位面 111 平行于管柱 12 的中心轴,接头 11 于第二定位面 111处的横截面为 d 字形轴截面,当所述握柄 2 安装于管柱12,所述 u形套套设于接头 11,所述第一定位面 251 和第二定位面 111 触接以限制卡套 25 相对于接头 11 的转动。
48.而且,接头 11 的后端设有倾斜的第一导向面 113,卡块 223 的内侧对应设有倾斜的第二导向面,当第一导向面 113 和第二导向面抵接,所述第一导向面 113 可给予第二导向面作用力以使卡块 223 向远离卡套 25 中轴线的方向移动。
49.这样,所述握柄 2 组装到接头 11 上时,先将卡套 25 套在裸露的管柱 12 上,再沿轴向向前移动卡套 25,然后卡块 223 的第二导向面与接头 11 的第一导向面 113 接触,继续向前推动,在第一导向面 113和第二导向面的作用下,卡块 223 会在安装槽内向远离接头 11 中心轴的方向移动,直至卡块 223 到达卡槽 112 的位置,在定位弹簧 23的作用下,卡块 223 插入卡槽 112,且第一定位面 251 和第二定位面111 触接,这样就把握柄 2 固定在接头 11 上。当需要拆下握柄 2 时,只需要拨动拨块 26,让卡块 223 向远离接头 11 中心轴的方向移动,使卡块 223 脱离卡槽112,并向后移动卡套 25,让卡套 25 脱离接头11,最后从卡套 25 的开口将管柱 12 与卡套 25 分离即可。
50.参见图 3 和图 4,所述手柄主体 1 还包括推动架 14 和复位件 17,所述推动架 14 与滑块 13 连接,所述握环 3 可旋转地连接于推动架14,所述握环 3 可通过推动架 14 驱动滑块 13 滑动,所述复位件 17可驱动滑块 13 向远离握柄 2 安装位置的方向滑动。
51.具体的,握环 3 可旋转,而不是固定连接在推动架 14 上,是为了适应于不同的人手,因为不同的人操作时,或者滑块在不同位置时,握着握环 3 的手指的角度是不同的,这样的设计可以大大增加人群的普适性,而且提高使员者操作的舒适性和顺畅性,可减少意外发生。
52.进一步的,复位件 17 驱动滑块 13 的结构有多种,例如,所述推动架 14 与滑块 13 固定连接,所述复位件 17 为弹簧,所述弹簧套设于管柱 12,所述弹簧的一端连接滑块 13。当弹簧是压簧,压簧位于滑块 13 的前方,具体到本实施例的结构,压簧位于接头 11 和滑块13 之间,压簧的两端分别抵接接头 11 和滑块 13。当弹簧是拉簧,拉簧位于滑块 13 的后方,拉簧位于滑块 13 和管柱 12 的后端之间,拉簧的两端分别固定连接滑块 13 和管柱 12 的后端。在自然状态下,滑块 13 在弹簧的作用下,位于管柱 12 的后部,电极 7 的前端缩在鞘套组件 6 中。
53.在本实施例中,复位件 17 驱动滑块 13 的结构为,所述手柄主体1 还包括固定架 15,滑块 13 位于接头 11 和固定架 15 之间,所述固定架 15 的一端和推动架 14 的一端通过第一连接轴16 铰接,所述复位件17 为扭簧,所述扭簧套设于第一连接轴16,所述扭簧的两端分别连接固定架 15 和推动架 14,所述固定架 15 的另一端与管柱 12 铰接,所述推动架 14 的中部与滑块 13 铰接,所述握环 3 可通过螺纹连接于推动架 14 的另一端。
54.这样,当握环 3 安装在推动架 14 时,通过握环 3 向前推动推动架 14,即可驱动滑块 13 沿着管柱 12 向前滑动,滑块 13 带动电极 7向前移动,滑块 13 运动至抵触接头 11 即为向前移动的极限位置;而当释放推动力后,复位件 17 直接推动滑块 13,或复位件 17 通过推动架 14 推动滑块 13,向后移动以进行复位,滑块 13 带动电极 7 向后移动。
55.具体的,握环 3 可旋转的结构有多种,例如,推动架 14 对应设有连接孔,握环 3 的一侧设有旋转轴,旋转轴插设于连接孔,且连接孔的直径略大于旋转轴的直径,旋转轴的另一侧螺接防脱块以防止旋转轴脱出连接孔,握环 3 可以绕着连接孔的轴向转动。拧掉防脱块,握环 3 接可以拆掉。
56.参见图 8,在本实施例中,握环 3 可旋转的结构为,所述握环 3通过连接锁 4 与推动架 14 连接,所述连接锁 4 的一端开设有安装孔,所述安装孔的内壁沿周向开设有第一环槽,所述握环 3 的一侧设有第二连接轴31,所述安装孔的直径大于第二连接轴31 的直径,所述第二连接轴31外沿周向开设有第二环槽,第二环槽内卡设有卡簧 32,卡簧 32 为 c形卡簧,所述第二连接轴31 插设于安装孔,所述卡簧 32 插设于第一环槽,所述握环 3 可绕安装孔的轴向转动,所述连接锁 4 的另一端设有螺柱41,所述推动架 14 对应设有螺孔 141,所述螺柱 41 可安装于螺孔 141。
57.将螺柱 41 拧入或拧出螺孔 141,就可以将握环 3 安装或拆离于推动架 14,拆装方便。
58.由以上结构可以看出,握柄2 和握环3 均具备能快速拆装的功能,电切镜手柄可在两种状态之间快速转换,这样就可以在同时需要人手和手术机器人进行手术操作的场合,快速地对握柄 2 和握环 3 进行安装和拆卸,以分别适应人手和手术机器人。此电切镜手柄能兼用于人手和手术机器人,解决了目前电切镜手柄不适合手术机器人操作的情况,
以及手术过程中转换不易的问题。
59.此外,管柱 12 的后端固定连接有固定环 18,滑块 13 位于接头11 和固定环 18 之间,固定架 15 的另一端铰接于固定环 18,也就是固定架 15 通过固定环 18 与管柱 12 铰接。内窥镜组件 5 安装于固定环 18 的后端,鞘套组件 6 安装于接头 11 的前端。
60.需要注意的是,本文使用术语“第一”、“第二”、“第三”等来描述各种部件或零件,但这些部件或零件不受这些术语的限制,这些术语仅用来区别一个部件或零件与另一部件或零件。且术语诸如“第一”、“第二”和其他数值项在本文使用时不是暗示次序或顺序,除非由上下文清楚地指出。为了便于描述,本文使用空间相对术语,诸如“内部”、“外部”、“上端”、“下端”、“左侧”、“右侧”、“上部的”、“左”、“右”等,以描述本实施例中部件或零件的方位关系,但这些空间相对术语并不对技术特征在实际应用中的方位构成限制,且词语“内”和“外”分别指的是朝向或远离特定部件几何中心的方向。
61.以上所述,只是本实用新型的较佳实施方式而已,但本实用新型并不限于上述实施例,只要其以任何相同或相似手段达到本实用新型的技术效果,都应属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1