一种基于绳索驱动的外骨骼上肢康复机器人的制作方法
1.本实用新型涉及医疗康复器械技术领域,具体涉及一种基于绳索驱动的外骨骼上肢康复机器人。
背景技术:
2.医学理论实践证明,对上肢受伤患者,进行康复训练是恢复其上肢运动功能的有效途径,在国内外传统康复治疗中,通常由治疗师一对一对患者进行康复训练,缺乏科学评价训练参数以及康复效果的客观有效评估,且通常容易对患者产生较大经济负担,因此研制一种满足上肢主被动康复训练装置可以提高康复训练效率和效果,具有迫切的实际意义以及较高的价值,例如专利号cn201811118650.0提出由七个直流电机通过绳索驱动康复训练机器人实现上肢肩关节的外展屈/伸以及肘关节的屈/伸的主被动康复训练,绳索驱动以及树脂材料的应用能够降低康复训练机器人本体的运动惯性,增加康复训练的舒适度,提高康复训练效率。但过于庞大的装置穿戴不便,且只靠绳索引导无法保证运动方向的稳定,可能造成手臂的负担增加,易对用户造成损伤。
技术实现要素:
3.(一)解决的技术问题
4.针对现有技术的不足,本实用新型提供了一种基于绳索驱动的外骨骼上肢康复机器人。
5.(二)技术方案
6.为了实现上述目的,本实用新型提供如下技术方案:一种基于绳索驱动的外骨骼上肢康复机器人,包括支架,支架上设有座椅和机器人本体,所述机器人本体上设有长度调节装置,所述长度调节装置包括上臂护托、下臂护托、第一连接杆和第二连接杆,所述上臂护托和下臂护托上设有固定带,所述第一连接杆一端表面向内凹陷设有滑动槽,另一端表面设有向内凹陷的数个安装孔,且安装孔与滑动槽连通,所述上臂护托一端设有与滑动槽对应的定位块,定位块上设有带螺纹的安装槽,定位块和滑动槽滑动连接,安装孔与安装槽通过螺栓完成固定,所述第二连接杆和下臂护托上设有与第一连接杆和上臂护托对应的结构,所述第二连接杆一端设有转轴,第一连接杆一端设有与转轴对应的转轴孔,且转轴孔与转轴连接。
7.优选的,所述支架上设有驱动结构,所述驱动结构包括驱动控制箱、肩部护托、第一驱动绳索、第二驱动绳索、第三驱动绳索、第四驱动绳索和第五驱动绳索,所述驱动控制箱安装在支架上,驱动控制箱内设有电源模块、若干直流电机和驱动控制模块,所述上臂护托上设有第一连接孔、第二连接孔、第三连接端、第四连接端和第五连接端所述下臂护托上设有与第一连接孔和第二连接孔对应的第一连接端和第二连接端,所述肩部护托上设有若干定位孔,所述第一驱动绳索和第二驱动绳索分别经过第一连接孔、第二连接孔和定位孔将第一连接端和第二连接端与直流电机连接,第三驱动绳索、第四驱动绳索和第五驱动绳
索经过不同定位孔将第三连接端、第四连接端和第五连接端与直流电机连接。
8.在进一步中优选的是,所述支架设有高度调节装置,所述高度调节装置包括第一支架和第二支架,第二支架上设有与第一支架对应的立杆槽和与立杆槽连通的螺纹孔,且螺纹孔内设有固定螺栓。
9.在进一步中优选的是,所述支架设有高度调节装置,所述高度调节装置包括第一支架和第二支架,第二支架上设有与第一支架对应的立杆槽和与立杆槽连通的螺纹孔,且螺纹孔内设有固定螺栓,所述第一支架和第二支架组成支架。
10.在进一步中优选的是,所述上臂护托和下臂护托内设有充气气垫。
11.在进一步中优选的是,所述支架下端设有支撑腿。
12.在进一步中优选的是,所述固定带包括第一弹性带和第二弹性带,所述第一弹性带和所述第二弹性带分别设置在上臂护托和下臂护托的两端,第一弹性带下端面设有刺毛面,第二弹性带上端面设有圆毛面,第一弹性带与第二弹性带相关连接。
13.在进一步中优选的是,所述第一连接端和第二连接端设置在下臂护托的两端,第一连接孔和第二连接孔与第一连接端和第二连接端对应设置在上臂护托。
14.(三)有益效果
15.与现有技术相比,本实用新型提供了一种基于绳索驱动的外骨骼上肢康复机器人,具备以下有益效果:
16.本实用新型,通过在第一连接杆和第二连接杆上设置滑动槽,并在上臂护托和下臂护托上设置对应的定位块,使定位块在滑动槽内移动实现对装置长度的调节,并通过螺栓穿过安装孔与安装槽可拆卸连接实现方便拆卸的固定;通过第一支架33和第二支架34的移动实现高度的调节,通过对长度和高度的调节使不同体格的人都可以使用该装置;通过第三至第五驱动绳索控制肩关节外展和屈伸自由度的运动,通过第一至第二驱动绳索控制肘关节的屈伸,各个驱动绳索独立运动,减少了绳索之间的干涉以及运动过程中的耦合现象;通过第一连接杆和第二连接杆对上臂护托和下臂护托的定位实现对运动轨道的固定,能够减少作用于人体手臂上的合力,防止康复训练过程中的二次伤害。
附图说明
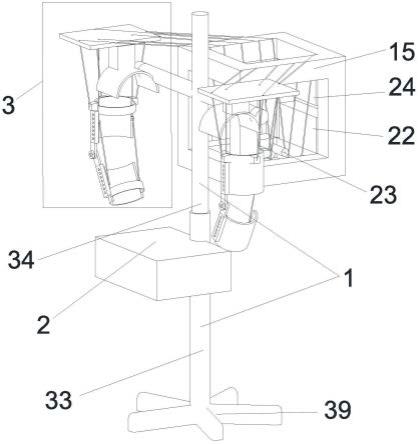
17.图1为本实用新型中一种基于绳索驱动的外骨骼上肢康复机器人立体结构示意图;
18.图2为本实用新型中机器人本体外表面结构示意图;
19.图3为本实用新型中机器人本体内面结构示意图;
20.图4为本实用新型中上臂护托立体结构示意图;
21.图5为本实用新型中第一支架33和第二支架34连接结构内部示意图。
22.图中:1、支架;2、座椅;3、机器人本体;4、上臂护托;5、下臂护托; 6、第一连接杆;7、第二连接杆;8、固定带;9、滑动槽;10、安装孔;11、定位块;12、安装槽;13、转轴;14、转轴孔;15、驱动控制箱;16、肩部护托;17、第一驱动绳索;18、第二驱动绳索;19、第三驱动绳索;20、第四驱动绳索;21、第五驱动绳索;22、电源模块;23、直流电机;24、驱动控制模块;25、第一连接孔;26、第二连接孔;27、第三连接端;28、第四连接端;29、第五连接端;30、第一连接端;31、第二连接端;32、定位孔; 33、第一支架;34、第二支架;35、立杆槽;36、螺纹孔;37、固
定螺栓; 38、螺母;39、支撑腿;40、第一弹性带;41、第二弹性带;42、刺毛面; 43、圆毛面。
具体实施方式
23.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
24.实施例:
25.请参阅图1-5,一种基于绳索驱动的外骨骼上肢康复机器人,包括支架1,支架1上设有座椅2和机器人本体3,所述机器人本体3上设有长度调节装置,所述长度调节装置包括上臂护托4、下臂护托5、第一连接杆6和第二连接杆 7,所述上臂护托4和下臂护托5上设有固定带8,所述第一连接杆6一端表面向内凹陷设有滑动槽9,另一端表面设有向内凹陷的数个安装孔10,且安装孔10与滑动槽9连通,所述上臂护托4一端设有与滑动槽9对应的定位块11,定位块11上设有带螺纹的安装槽12,定位块11和滑动槽9滑动连接,安装孔10与安装槽12通过螺栓完成固定,所述第二连接杆7和下臂护托5 上设有与第一连接杆6和上臂护托4对应的结构,所述第二连接杆7一端设有转轴13,第一连接杆6一端设有与转轴13对应的转轴孔14,且转轴孔14 与转轴13连接。
26.在本实施例中,支架1上设有驱动结构,所述驱动结构包括驱动控制箱 15、肩部护托16、第一驱动绳索17、第二驱动绳索18、第三驱动绳索19、第四驱动绳索20和第五驱动绳索21,所述驱动控制箱15安装在支架1上,驱动控制箱内15设有电源模块22、若干直流电机23和驱动控制模块24,所述上臂护托4上设有第一连接孔25、第二连接孔26、第三连接端27、第四连接端28和第五连接端29所述下臂护托5上设有与第一连接孔25和第二连接孔26对应的第一连接端30和第二连接端31,所述肩部护托16上设有若干定位孔32,所述第一驱动绳索17和第二驱动绳索18分别经过第一连接孔25、第二连接孔26和定位孔32将第一连接端30和第二连接端31与直流电机23 连接,第三驱动绳索19、第四驱动绳索20和第五驱动绳索21经过不同定位孔32将第三连接端27、第四连接端28和第五连接端29与直流电机23连接,在实现肩关节外展内收和屈伸自由度的运动的同时,各驱动部分相互独立,减少了绳索之间的干涉以及运动过程中的耦合现象。
27.在本实施例中,支架1设有高度调节装置,所述高度调节装置包括第一支架33和第二支架34,第二支架34上设有与第一支架33对应的立杆槽35 和与立杆槽35连通的螺纹孔36,且螺纹孔36内设有固定螺栓37,所述第一支架33和第二支架34组成支架1,可以调整支架1的高度,适应不同体型的人群。
28.在本实施例中,所述转轴13长度大于转轴孔14厚度,且大于部分设有螺纹,第一连接杆6和第二连接杆7通过螺母38进行固定,同时使转轴13 和转轴孔14保持松弛,可以让第二连接杆7以转轴13为轴相对与第一连接杆6转动。
29.在本实施例中,所述上臂护托4和下臂护托5内设有充气气垫,使装置和手臂更贴合,增加使用效果。
30.在本实施例中,所述支架1下端设有支撑腿39,使支架1放置更稳定,方便移动。
31.在本实施例中,所述固定带8包括第一弹性带40和第二弹性带41,所述第一弹性带
40和所述第二弹性带41分别设置在上臂护托4和下臂护托5的两端,第一弹性带40下端面设有刺毛面42,第二弹性带41上端面设有圆毛面43,第一弹性带40与第二弹性带41相关连接,使装置的穿戴更方便,增加使用效率。
32.在本实施例中,所述第一连接端30和第二连接端31设置在下臂护托5 的两端,第一连接孔25和第二连接孔26与第一连接端30和第二连接端31 对应设置在上臂护托4,使下臂护托5受力更均匀,维持水平状态稳定,并且延长器材使用寿命。
33.工作原理:
34.综上,使用时调节第二支架34的高度,使第二支架34沿着第一支架33 内的立杆槽35移动,当第二支架34的高度符合使用着时,使固定螺栓37穿过螺纹孔36压紧固定第二支架34;使用者坐在座椅2上,将肩部放在肩部护托16内,把手臂放在上臂护托4和下臂护托5内,调节所述长度调节装置,使上臂护托4上的定位块11沿着第一连接杆6上的滑动槽9移动,符合使用着手臂长度时,通过安装孔10和安装槽12对第一连接杆6和上臂护托4螺栓固定,所述下臂护托5和第二连接杆7的调整同上,在充气气垫的配合下,调整第一弹性带40和第二弹性带41的长度,将刺毛面42扣在圆毛面43上,完成固定带8对手臂的固定;工作时打开驱动控制箱15,电源模块22对十个直流电机23供电,通过驱动控制模块24控制直流电机23,直流电机23通过转动控制各个驱动绳索的收紧和伸展,各个驱动绳索通过定位孔32与上臂护托4保持一定的角度,当需要做屈肘运动时,第一驱动绳索17和第二驱动绳索18收紧,第一驱动绳索17和第二驱动绳索18拉动第一连接端30和第二连接端31向第一连接孔25和第二连接孔26移动,经过第一连接杆6上和第二连接杆7的固定,在转轴13对应的转轴孔14的作用下,下臂护托5只能以转轴13为轴旋转移动,在第一驱动绳索17和第二驱动绳索18的牵引下完成屈肘运动,当需要向前伸展时,第三驱动绳索19收紧,第四驱动绳索20 放松,第三驱动绳索19拉动第三连接端27,使上臂护托4向前伸展,同时上臂护托4通过第一连接杆6和第二连接杆7带动下臂护托5一起向前伸展,当需要向后伸展时,第三驱动绳索19放松,第四驱动绳索20收紧,第四驱动绳索20拉动第四连接端28,使上臂护托4向后伸展,同时上臂护托4通过第一连接杆6和第二连接杆7带动下臂护托5一起向后伸展,当需要两臂展开时,第五驱动绳索21收紧,第五驱动绳索21拉动第五连接端29,使上臂护托4向两边伸展,同时上臂护托4通过第一连接杆6和第二连接杆7带动下臂护托5一起向两边伸展。
35.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1