用于手术器械夹持固定的蛇形臂的制作方法
1.本实用新型涉及手术器械夹持固定器械领域,具体涉及一种用于手术器械夹持固定的蛇形臂。
背景技术:
2.目前的微创手术过程中,腹部牵开器等手术器械一般是由一个专门的助手扶持。人工持械的缺点是:增加手术室内的人数,使得手术室内空间更加拥挤;此外,人手持械很难适应时间较长的大型手术,因为时间稍长的话,肌肉疲劳,持械的人手会发抖,影响手术效果。
3.申请公布号cn 111012610 a(申请号为201911425899.0)的中国专利申请公开了一种蛇形手术器械及内窥镜夹持器,包括:底座、蛇形臂﹑夹持机械手,所述蛇形臂尾部连接底座内部的气动或电动能量源驱动装置,所述蛇形臂端头设有夹持机械手。该技术方案提供的一种蛇形手术器械及内窥镜夹持器,蛇形臂任意角度可一键操作位置固定,可任意全方位自由活动,任意位置自由固定,调节方便的同时,不受任何外界干涉,完全取代人工扶持;底座及蛇形臂可以在0-180度扇形任意位置内做固定。该技术方案中,驱动装置为电动或气动,所述驱动装置开关为手控开关或脚控开关。但是没有公开具体的结构,需要本实用新型进一步研究和探索新的驱动结构。
技术实现要素:
4.针对上述技术缺陷,本实用新型提供了一种用于手术器械夹持固定的蛇形臂,蛇形臂可任意全方位自由活动,任意位置自由锁定,自由和锁定两种状态可以通过一键操作实现切换。调节方便且不受任何的外界的干涉,完全取代人工扶持。
5.为了达到上述目的,本实用新型提供如下技术方案:
6.一种用于手术器械夹持固定的蛇形臂,包括:底座、设置在所述底座内的驱动装置、底座外部设置有锁紧装置、与所述驱动装置连接的蛇形臂以及与所述蛇形臂端部连接的夹持机械手;
7.所述的驱动装置包括:
8.电机组件;
9.与所述电机组件连接的丝杠组件;
10.用于安装所述丝杠组件的轴承座组件;
11.与所述丝杠组件配合的滑动座组件;
12.安装在所述滑动座组件并与所述蛇形臂上的钢丝固定的钢丝锁紧机构。
13.本实用新型中,电机组件驱动丝杠组件转动,从而带动丝杠组件上配合的滑动座组件移动,滑动座组件移动使得钢丝锁紧机构可以前后移动,从而拉伸或放松所述蛇形臂上的钢丝,达到控制蛇形臂的目的。
14.以下作为本实用新型的优选技术方案;
15.所述的电机组件通过联轴器和平键用与所述丝杠组件连接。
16.所述的丝杠组件安装在所述轴承座上。轴承座组件用途:承受丝杠组件的轴线方向的双向轴向力,固定丝杠组件,防止轴向窜动。
17.所述的钢丝锁紧机构包括:
18.安装在所述轴承座上并与所述滑动座组件固定的导向杆,所述的导向杆内设有供所述蛇形臂上的钢丝通过的中空孔或者通道;
19.设置在所述导向杆端部的钢丝绳锁紧器。
20.钢丝绳锁紧器用于固定蛇形臂上的钢丝的端部。
21.所述的钢丝绳锁紧器与所述导向杆之间设置有缓冲弹簧(即碟形弹簧)和力传感器,所述的缓冲弹簧和力传感器还设置有垫圈。
22.所述的底座外部设置有锁紧装置,用于将底座固定于手术床边杆上。
23.所述锁紧装置包括手柄、螺钉以及连接手术床安装座。螺钉用于将连接手术床安装座固定在底座底板上。先将安装座c型卡爪卡在手术床边杆上,然后通过旋转直杆形手柄控制锁紧和松开。
24.所述蛇形臂包括:钢丝、尾部关节杆以及多个依次首尾串联连接在钢丝绳上的中空关节球,所述钢丝一端连接蛇形臂顶部并贯通于关节,另外一端在底座壳体内部与钢丝锁紧机构连接,并在驱动装置与钢丝锁紧机构配合下可拉紧固定或松开关节。
25.所述驱动装置为电动,所述驱动装置开关为手控开关。
26.与现有技术相比,本实用新型具有如下优点:
27.本实用新型中,电机组件驱动丝杠组件转动,从而带动丝杠组件上配合的滑动座组件移动,滑动座组件移动使得钢丝锁紧机构可以前后移动,从而拉伸或放松所述蛇形臂上的钢丝,达到控制蛇形臂的目的,可以较好地控制蛇形臂。
28.本实用新型用于手术器械夹持固定的蛇形臂,蛇形臂可任意全方位自由活动,任意位置自由锁定,自由和锁定两种状态可以通过一键操作实现切换。调节方便且不受任何的外界的干涉,完全取代人工扶持。
附图说明
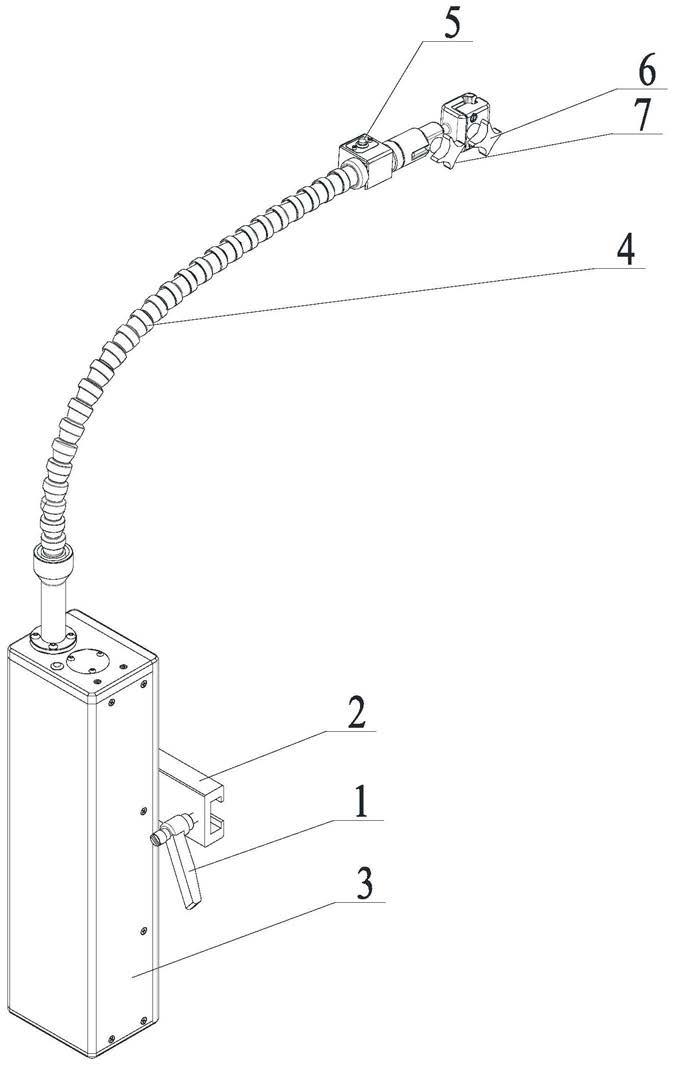
29.图1为本实用新型用于手术器械夹持固定的蛇形臂的结构示意图;
30.图2为本实用新型用于手术器械夹持固定的蛇形臂的拆开上盖结构示意图;
31.图3为本实用新型用于手术器械夹持固定的蛇形臂的底座内部结构示意图;
32.图4为本实用新型中驱动装置和钢丝锁紧机构的结构示意图;
33.图5为本实用新型中钢丝锁紧机构的结构示意图;
34.其中,1为直杆形手柄,2为连接手术床安装座,3为底座,4为蛇形臂,5为按钮组件,6为夹头组件,7为夹头组件固定用旋紧手柄,11为上盖,12为十字槽沉头螺钉,13为内六角圆柱头螺钉,14为加强板,15为后盖组件,16为底板组件,17为内六角圆柱头螺钉,18为电机组件,19为内六角圆柱头螺钉,20为夹紧螺丝固定型梅花联轴器,21为平键,22为轴承座组件,23为丝杠组件,24为滑动座组件,25为顶板组件,30为碟形弹簧,31为垫圈,32为力传感器,33为钢丝绳锁紧器,34为内六角圆柱头螺钉,35为楔块。
具体实施方式
35.下面结合附图对本实用新型用于手术器械夹持固定的蛇形臂作进一步详细描述。
36.如图1所示,一种用于手术器械夹持固定的蛇形臂,包括:底座3、设置在底座3内的驱动装置、设置在底座3外部部的锁紧装置、与驱动装置连接的蛇形臂4以及与蛇形臂端部连接的夹持机械手(夹头组件6和夹头组件固定用旋紧手柄7)。
37.如图1、图2、图3所示,底座3外部设置有锁紧装置,用于将底座3固定于手术床边杆上。锁紧装置包括直杆形手柄1、螺钉以及连接手术床安装座2。螺钉用于将连接手术床安装座2固定在底座3底板上。先将连接手术床安装座2的c型卡爪卡在手术床边杆上,然后通过旋转直杆形手柄1控制锁紧和松开。
38.如图1、图2、图3所示,蛇形臂包括:钢丝、尾部关节杆以及多个依次首尾串联连接在钢丝绳上的中空关节球,钢丝一端连接蛇形臂顶部并贯通于蛇形臂的关节,另外一端在底座3壳体内部与钢丝锁紧机构连接,并在驱动装置与钢丝锁紧机构配合下可拉紧固定或松开关节。
39.如图2、图3所示,底座3包括底板组件16、后盖组件15、顶板组件25以及上盖11。后盖组件15通过内六角圆柱头螺钉17与底板组件16固定。上盖11通过十字槽沉头螺钉12与后盖组件15、底板组件16、顶板组件25连接固定。
40.如图3、图4、图5所示,驱动装置为电动,驱动装置开关为手控开关,手控开关为按钮组件5。驱动装置包括:电机组件18;与电机组件18连接的夹紧螺丝固定型梅花联轴器20和平键21;之后连接;与丝杠组件23配合的滑动座组件24;用于安装丝杠组件23的轴承座组件22;安装在轴承座组件22上并与滑动座组件23固定的导向杆,所导向杆内设有供蛇形臂上的钢丝通过的中空孔或者通道;设置在导向杆端部的钢丝绳锁紧器33。蛇形臂上的钢丝绕过楔块35后用内六角圆柱头螺钉34固定。钢丝绳锁紧器33与导向杆之间设置有缓冲弹簧(即碟形弹簧30)和力传感器32,缓冲弹簧和力传感器还设置有垫圈31。
41.本实用新型中,电机组件18驱动丝杠组件23转动,从而带动丝杠组件23上配合的轴承座组件22移动,轴承座组件22移动使得钢丝锁紧机构可以前后移动,从而拉伸或放松所述蛇形臂上的钢丝,达到控制蛇形臂的目的。
42.以上所述的具体实施方式对本实用新型的技术方案和有益效果进行了详细说明,应理解的是以上所述仅为本实用新型的最优选实施例,并不用于限制本实用新型,凡在本实用新型的原则范围内所做的任何修改、补充和等同替换等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1