一种手术台车的定位调整系统的制作方法
1.本实用新型涉及医疗器械领域,具体是一种手术台车的定位调整系统。
背景技术:
2.随着医疗器械、计算机技术及控制技术的不断发展,手术机器人以其稳定性高、手术创伤小、康复时间短、患者痛苦少等优点得到了越来越广泛的应用。其中,腹腔手术机器人为手术机器人的代表,腹腔手术机器人又被称作“内窥镜手术器械控制系统”,是由医生控制台、患者手术平台、图像平台构成。相比传统的手术辅助机器人,腹腔手术机器人在临床中应用具备定位更加精确,能够减少手术创伤、提升患者伤口愈合速度。在手术时,患者手术平台的手术臂的一端设置手术器械,通过控制机械臂运动使得手术器械深入人体内,实现不同部位的外科手术。
3.手术机器人手术前需要按手术要求进行摆位。具体地,由医护人员将患者手术平台推到手术室,并放置在病床旁边,再由医护人员人手动调整手术台车,使得手术台车搭载的手术臂的工作空间覆盖患者体内的手术区域,主要依靠人眼判断机器人是否调整到位,对医护人员技能要求较高。
4.申请号为cn201811174941.1的中国专利公开了一种用于单孔微创术式的柔性手术机器人及其使用方法,包括一台主控台车,一台设备台车,至少两台在手术床旁的手术台车以及一单孔穿刺器,其中,第一手术台车搭载腹腔镜工具采集术部影像,其他第二手术台车搭载手术工具进行手术。该发明中主控台车用于为手术医生提供遥控操作手术台车和观察术部影像的平台,设备台车用于为手术台车定位,并接收来自主控台车的信号,为手术台车搭载的工具提供动力和控制信号。该发明可以通过采集到的图像,在平台上将信号发送给设备台车,设备台车再根据主控台车的控制信号操纵手术台车进行定位,但是设备数量多,占地面积大,成本高,且操作不便。
5.如果搭载了手术机器人的手术台车初步定位不够理想,往往会影响术中操作,导致多臂干涉或频繁触及工作空间边界,轻者延长手术时间,严重的可能导致手术失败。因此,有必要设计一种手术台车的定位调整系统,手术台车上搭载了手术臂,在术前即可实现手术台车与患者之间的精确定位,保障手术机器人的工作空间和工作流畅度,且结构简单紧凑,便于操作。
技术实现要素:
6.基于以上问题,本实用新型的目的在于提供了一种手术台车的定位调整系统。
7.为实现上述目的,本实用新型提供如下技术方案:
8.一种手术台车的定位调整系统,包括底座和固定在底座上的移动定位机构,其特征在于:还包括悬吊盘、图像采集装置、操纵中心;
9.所述悬吊盘通过第一旋转关节固定在所述移动定位机构末端的下表面上;
10.所述图像采集装置包括图像处理器和固定在悬吊盘下表面的图像采集器;所述图
像采集器的采集范围至少覆盖手术病灶区域;
11.所述图像处理器与所述图像采集器和所述操纵中心之间均为通讯连接;
12.所述图像处理器用于将图像采集器采集的图像信息进行分析,获得数据信息并传输给操纵中心;
13.所述操纵中心与所述移动定位机构、悬吊盘和图像采集装置通讯连接;
14.所述操纵中心具有定位界面,所述数据信息展示在所述定位界面上。
15.优选地,还包括手术标记物,所述手术标记物位于所述手术病灶区域;所述定位界面上设有悬吊盘中心标识。
16.优选地,所述图像采集器固定在所述悬吊盘的旋转中心上。
17.优选地,所述移动定位机构包括升降机构和伸缩机构,所述伸缩机构通过第二旋转关节与所述升降机构连接,所述伸缩机构在所述操纵中心的控制下绕着所述第二旋转关节的轴线旋转。
18.优选地,所述第二旋转关节的轴线与所述升降机构的轴线重合。
19.优选地,所述升降机构包括升降杆座和升降杆,所述升降杆座固定在所述底座上,所述升降杆部分同轴嵌入所述升降杆座,且该升降杆在所述操纵中心的控制下沿着所述升降杆的轴线移动。
20.优选地,所述伸缩机构包括同轴设置的伸缩杆座和伸缩杆,所述伸缩杆部分同轴嵌入所述伸缩杆座,且该伸缩杆在所述操纵中心的控制下沿着所述伸缩杆的轴线移动。
21.优选地,所述第一旋转关节固定在所述伸缩杆的下表面上。
22.优选地,所述操纵中心安装在所述移动定位机构的侧面。
23.优选地,所述悬吊盘上搭载两个以上手术机械臂;所述手术机械臂与所述操纵中心电性连接。
24.与现有技术相比,本实用新型有以下优势:
25.根据本实用新型技术方案,通过操纵中心控制移动定位机构和悬吊盘移动到合适位置,图像采集器可以采集手术病灶区域的图像信息。
26.图像处理器用于分析识别图像采集器所采集的图像信息,以获得数据信息,然后把数据信息传输到操纵中心;操纵中心具有定位界面,数据信息能够呈现在所述定位界面上,医护人员通过调整操纵中心的定位界面能够清晰地看到手术病灶区域的数据信息,通过操纵中心手动调整移动定位机构的位置,能够快速实现将定位界面上手术病灶调整到最合理位置。
27.与人工通过肉眼进行判断方式相比,本实用新型公开的方案不仅定位精确度高,且可靠性强。
附图说明
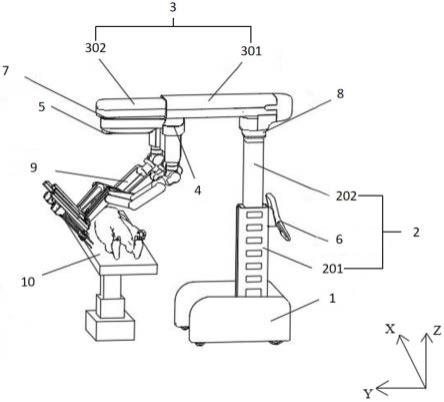
28.图1是手术台车的定位调整系统的整体结构示意图;
29.图2是手术台车的定位调整系统中悬吊盘部位的局部示意图;
30.图3是手术台车的定位调整系统中图像采集器的图像采集范围;
31.图4是手术台车的定位调整系统的工作流程。
32.附图标记:
33.ⅰ‑
图像采集范围;
34.1-底座;2-升降机构;201-升降杆座;202-升降杆;
35.3-伸缩机构;301-伸缩杆座;302-伸缩杆;
36.4-悬吊盘;5-图像采集器;6-操纵中心;7-第一旋转关节;8-第二旋转关节;9-手术机械臂;10-手术台;11-图像采集器座。
具体实施方式
37.为使本实用新型实施例的目的和技术方案更加清楚,下面将结合本实用新型实施例,对本实用新型的技术方案进行清楚、完整地描述。
38.在本技术的描述中,需要理解的是,术语“长度”、“上”、“下”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
39.实施例一
40.如附图1-附图3所示,一种手术台车的定位调整系统,包括底座1和移动定位机构,还包括悬吊盘4、图像采集装置和操纵中心6。
41.底座1的下表面四个角安装有四个脚轮组件,便于整体机构的移动和驻停。
42.移动定位机构用来实现机构末端的位姿变换,在本技术中,移动定位机构包括伸缩机构3和升降机构2,伸缩机构3通过第二旋转关节8与所述升降机构2连接且与所述升降机构2垂直,所述伸缩机构3在所述操纵中心6的控制下能够绕着所述第二旋转关节8的轴线旋转,其中所述第二旋转关节8的轴线与所述升降机构2的轴线重合,因此伸缩机构3整体可绕着升降机构2的轴线进行旋转。
43.所述升降机构2包括升降杆座201和升降杆202,所述升降杆座201固定在所述底座1上,所述升降杆202部分同轴嵌入所述升降杆座201,且该升降杆202在所述操纵中心6的控制下能够沿着所述升降杆202的轴线移动。所述伸缩机构3包括同轴设置的伸缩杆座301和伸缩杆302,所述伸缩杆302部分同轴嵌入所述伸缩杆座301,且该伸缩杆302在所述操纵中心6的控制下沿着所述伸缩杆座301的轴线移动。
44.如附图1所示,升降机构2中的升降杆202可沿着z向进行上下移动,由于伸缩机构3与升降机构2相垂直,且伸缩机构3中的伸缩杆座301与升降杆202之间通过第二旋转关节8连接,因此伸缩机构3可绕着z轴进行旋转,同时伸缩杆302可在y向上进行前后运动。
45.悬吊盘4通过第一旋转关节7固定在所述移动定位机构末端的下表面上;所述悬吊盘4在所述操纵中心6的控制下绕着所述第一旋转关节7的轴线进行旋转;其中第一旋转关节7固定在所述伸缩杆302上且随着所述伸缩杆302的运动而运动;所述第一旋转关节7可固定在所述伸缩杆302的端部或者下表面上。因此悬吊盘4在第一旋转关节7的带动下,可沿着伸缩杆302运动的方向同步运动,同时悬吊盘4绕着第一旋转关节7的轴线进行旋转,即也绕着z轴进行旋转。
46.所述图像采集装置包括图像处理器和固定在悬吊盘4下表面的图像采集器5;所述图像采集器5可以采集图片,也可以采集视频,可选择的装置有摄像机、照相机等。所述图像采集器5通过图像采集器座11固定在悬吊盘4下表面,由于旋转中心更加稳定,防抖动性更
好,拍摄出的图片更清晰,且固定在旋转中心,可避免悬吊盘4旋转时,图像采集器5进行采集图像时发生偏差,因此所述图像采集器5优选固定在所述悬吊盘4的旋转中心上。该图像采集器5的图像采集范围ⅰ覆盖手术病灶区域。优选地,所述图像采集器5的图像采集口正对着所述手术区域。
47.在所述移动定位机构的侧面安装有操纵中心6,所述操纵中心6与所述移动定位机构、悬吊盘4和图像采集装置通讯连接。操纵中心6可以控制移动定位机构和悬吊盘4的运动。
48.所述图像采集器5与所述图像处理器之间通过图像数据传输线进行图像数据传输;所述图像处理器与所述操纵中心6通讯连接,图像处理器用于分析识别图像采集器5采集的图像信息,以获得数据信息,然后把数据信息传输给操纵中心6;操纵中心6具有定位界面,所述数据信息展示在所述定位界面上。
49.所述悬吊盘4上搭载两个以上手术机械臂9;所述手术机械臂9与所述操纵中心6电性连接。在初定位运动过程中,手术机械臂9处于不会遮挡图像采集器5视野的位置,在初定位结束之后,操纵中心6开始控制手术机械臂9进行手术准备。
50.如图4所示,该手术台车的定位调整系统的工作流程如下:
51.s1、医护人员进行其他手术准备,包括套无菌袋等;
52.s2、医护人员操作手术台车移动到手术床附近,开启定位调整系统;
53.s3、手术台车的操纵中心6面板上出现定位界面,定位界面上实时显示数据信息;
54.s4、操作人员通过操纵中心6面板,操作移动手术台车的移动定位机构,调整机构,使手术区域处于图像采集范围;
55.s5、医护人员手动控制操纵移动定位机构,使定位界面中的数据信息处于最佳手术位置,初定位完成。
56.实施例二
57.实施例二中所采取的技术方案与实施例一中的方案类似,其中实施例二与实施例一相比,区别在于以下几点:
58.1.增加了手术标记物,所述手术标记物附着在手术目标的手术部位;以腹腔镜手术为例,该手术标记物可以为手术所用的戳卡,由于医疗人员需要通过戳卡建立通道放入腔镜的镜头,通过操纵戳卡孔内器械完成手术的切割和缝合,因此可以有效代表患者的手术部位。所述图像采集器5的镜头正对着所述手术台10上患者的手术部位,且该图像采集器5的图像采集范围ⅰ覆盖所有的所述手术标记物。
59.2.操纵中心6具有定位界面,所述图像采集装置获取的数据信息展示在所述定位界面上,所述数据信息包括手术标记物信息;所述定位界面上设有悬吊盘中心标识;操纵中心6基于标记物的相对位置在定位界面上生成悬吊盘中心目标位置,此时悬吊盘中心目标位置与悬吊盘中心标识有一定的位置偏差,可通过人工或手动的方式将二者重合,完成初定位。
60.如图4所示,在本实施例中,手术台车的定位调整系统的工作流程如下:
61.s1、医护人员进行其他手术准备,包括套无菌袋、提前打入手术标记物,如打戳卡等;
62.s2、医护人员操作手术台车移动到手术床附近,开启定位调整系统;
63.s3、手术台车的操纵中心6面板上出现定位界面,定位界面上实时显示出图像采集器5图像,同时界面图像上具有悬吊盘中心标识;
64.s4、操作人员通过操纵中心6面板,操作移动手术台车的移动定位机构,调整机构,使手术区域及手术标记物均处于图像采集范围;
65.s5、可选地,软件通过图像识别出手术标记物,基于手术标记物的相对位置生成悬吊盘中心目标位置,并在定位界面上提示,医护人员手动控制操纵装置设置悬吊盘中心与目标位置重合;
66.s6、可选地,软件通过图像识别出手术标记物,基于手术标记物的相对位置生成悬吊盘中心的目标位置,并在界面图像上提示,在得到医护人员授权下,系统自动基于目标位置与当前悬吊盘中心的实际位置偏差,生成运动指令至两者重合。
67.其中步骤s5、s6为可选的操作,其中任何一项均可达到初定位的目的,但相比较步实施例,步骤s5和s6基于图像识别技术,定位精确度高,可靠性强。除此之外在悬吊盘中心目标与定位界面上的悬吊盘中心标识进行位置比对重合时,医护人员按照步骤s5的操作进行手动重合,也可以选择步骤s6,授权操纵中心6根据位置偏差自动生成运动轨迹,调整手术台车末端悬吊盘4的位置,操作方便,解放人力。
68.以上仅为本实用新型的实施方式,其描述较为具体和详细,但并不能因此而理解为对本实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,例如变更移动结构等,这些显而易见的替换形式均属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1