用于氧舱舱体限位机构的手自动一体化控制系统及氧舱的制作方法
1.本技术涉及一种用于氧舱舱体限位机构的手自动一体化控制系统及氧舱。
背景技术:
2.氧舱通常分为高压氧舱和小型氧舱,高压氧舱多用于医学治疗,位于医疗机构中,对缺血缺氧性疾病具有较好的治疗作用。小型氧舱相比于高压氧舱的体积更小、成本更低且使用时舱内压力较低,便于家用,或者设置在养生馆、健身房和吸氧体验馆等地。
3.氧舱包括舱体、舱门、用于抵压舱门的气缸和与气缸的第一气口连接的泄气管。氧舱在使用时,舱体内部需要处于密封状态,因此氧舱的舱门大多为密封门。在舱门关闭后,由电磁阀控制气缸的进出气管导通,使活塞杆伸出,抵紧舱门,对舱门进行限位,提高舱体内部的密封性。
4.在氧舱的使用过程中,发明人发现现有的氧舱易出现气缸的电磁泄压阀失效的情况,使气缸的活塞杆无法收缩,持续顶紧在舱门上,导致舱门无法开启,舱内始终处于密闭状态,使氧舱的使用安全性下降。
技术实现要素:
5.为了便于保证氧舱的使用安全性,本技术提供一种用于氧舱舱体限位机构的手自动一体化控制系统及氧舱。
6.第一方面,本技术提供的一种用于氧舱舱体限位机构的手自动一体化控制系统采用如下的技术方案:
7.一种用于氧舱舱体限位机构的手自动一体化控制系统,氧舱包括舱体、舱门、用于抵压所述舱门的气缸和与所述气缸的第一气口连接的泄气管,所述控制系统包括手动阀门,安装于所述泄气管上,用于密封所述泄气管或使所述泄气管与外界连通;
8.所述手动阀门包括阀体和把手;所述阀体用于密封所述泄气管或使所述泄气管与外界连通,所述把手用于驱动所述阀体,改变所述阀体状态;
9.所述阀体的外壁上设有固定环,所述把手上开设有通孔,所述通孔中滑动设置有用于插入所述固定环中的限位杆,所述限位杆插入在所述固定环中时,所述阀体将所述泄气管密封,不与外界连通;
10.所述把手上设有电磁铁,所述电磁铁用于在通电时,吸附所述限位杆,使所述限位杆脱离所述固定环;
11.所述控制系统还包括控制器,用于控制电磁铁得电或掉电。
12.通过采用上述技术方案,泄气管与气缸的第一气口连接,在气缸使用过程中,进入或流出气缸内部的气体会经过泄气管。在气缸的电磁泄压阀失效时,氧舱使用者或者工作人员可以通过扳动手动阀门,使泄气管与外界连通,从而将气缸内部的气体排放到外界,气缸的活塞杆即可收缩。使舱门不易因气缸抵紧而无法开启,此外也便于舱门与舱体之间产生缝隙,保证舱体内部与舱体外部间的空气流通,降低氧舱使用者因舱门无法正常开启而
发生危险的概率,有助于保证氧舱的使用安全性;
13.限位杆插入在固定环中时,泄气管与外界不连通,即泄气管中的气体无法经过手动阀门流到舱体内,此时气缸正常工作。在气缸无法正常收缩活塞杆时,通过控制器使电磁铁得电,电磁铁吸附限位杆,限位杆脱离固定环,把手即可以正常转动,从而使手动阀门开启,泄气管中的气体经过手动阀门流到舱体内部,达到气缸活塞杆收缩的目的。由于设置了限位杆、固定环、电磁铁和控制器等结构,便于对手动阀门进行锁定,降低因氧舱使用者误操作触动手动阀门,导致气缸活塞杆收缩,舱门移动,氧舱密封性降低的情况发生的概率。
14.可选的,所述泄气管安装有所述手动阀门的部分位于所述舱体内部,所述手动阀门位于所述舱体内部。
15.通过采用上述技术方案,手动阀门位于舱体内部,便于氧舱使用者在不适的情况下,可以通过扳动手动阀门,使气缸的活塞杆收缩,从而开启舱门,及时出舱。
16.可选的,所述限位杆上设有压力传感器,被配置为向所述控制器传输检测的压力信号;
17.所述控制器被配置为在所述压力信号变化时,使所述电磁铁得电。
18.通过采用上述技术方案,在氧舱使用者首次扳动手动阀门时,压力传感器与固定环抵接,压力信号发生变化,控制器控制电磁铁得电,限位杆脱离固定环,使氧舱使用者再次扳动手动阀门时即可为气缸泄气。一方面,氧舱使用者两次扳动把手即可开启手动阀门,无需手动将限位杆脱离固定环,方便快捷;另一方面,二次扳动把手才可使手动阀门开启,有助于降低因氧舱使用者误操作使手动阀门开启的概率,保证氧舱的正常使用。
19.可选的,所述把手上安装有警示灯;所述控制器被配置为在所述压力信号变化时,使所述警示灯闪烁。
20.通过采用上述技术方案,警示灯闪烁,便于起到警示作用,降低氧舱使用者二次扳动把手的概率,从而便于减少因误操作使气缸的活塞杆收缩,导致氧舱漏气的情况。
21.可选的,所述控制器通信连接有计时器,所述计时器被配置为在计时结束后,向所述控制器传输计时信号;
22.所述控制器被配置为在接收到所述计时信号时,控制所述电磁铁得电。
23.通过采用上述技术方案,计时器计时结束后,代表氧舱使用者的单次使用时间结束,此时氧舱使用者应该走出舱体内部。因此控制器控制电磁铁得电,若气缸无法正常收缩活塞杆,氧舱使用者扳动一次把手,即可开启手动阀门,方便快捷;同时,在需要紧急开启舱门时,也便于减少需要两次扳动把手的时间,有助于保证氧舱的使用安全性。
24.可选的,所述把手上安装有提示灯;所述控制器被配置为在接收到所述计时信号时,控制所述提示灯常亮。
25.通过采用上述技术方案,控制器接收到计时信号证明氧舱使用者的单次使用时间结束,提示灯常亮,便于在需要控制气缸活塞杆收缩时,氧舱使用者能够发现手动阀门的位置,从而便于避免在需要紧急开启舱门时,氧舱使用者无法快速找到手动阀门位置的情况。
26.第二方面,本技术提供的一种氧仓采用如下的技术方案:
27.一种氧舱,包括舱体、舱门、用于抵压所述舱门的气缸和与所述气缸的第一气口连接的泄气管,所述舱体的底板上开设有用于供所述泄气管穿设的第一通道和第二通道;
28.所述泄气管包括安装部,所述泄气管穿设所述第一通道和所述第二通道后,所述
安装部位于所述舱体内部,所述安装部上安装有上述的手动阀门。
29.通过采用上述技术方案,安装部位于舱体内部,手动阀门位于安装部上,便于氧舱使用者在舱体内部对气缸进行泄压,使气缸的活塞杆收缩。有助于在气缸的电磁泄压阀失效时,氧舱使用者及时控制气缸的活塞杆收缩,保证舱门能够顺利开启。
30.综上所述,与气缸连接的泄气管上安装有手动阀门,使气缸的电磁泄压阀失效时,氧舱使用者或者工作人员可以通过扳动手动阀门,将气缸中的气体排放到外界,使活塞杆可以收缩,易于保证舱门的顺利开启,保证了氧舱使用者的安全性,从而便于保证氧舱的使用安全性。
31.此外,限位杆、固定环、电磁铁和控制器有助于降低手动阀门因误操作而开启的概率,便于保证氧舱的正常使用,从而便于保证氧舱的使用体验感。
附图说明
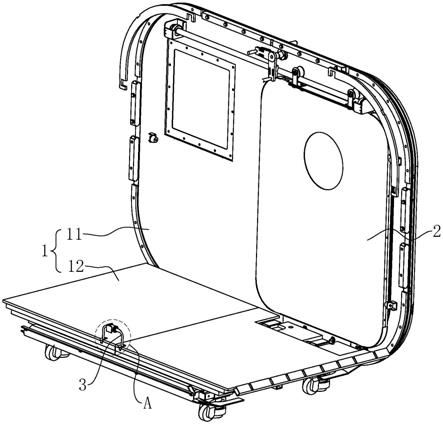
32.图1是本技术实施例的一种氧舱的内部结构示意图。
33.图2是图1中a部分的放大图。
34.图3是本技术实施例的一种用于氧舱舱体限位机构的手自动一体化控制系统的结构框图。
35.图4是本技术实施例的一种用于氧舱舱体限位机构的手自动一体化控制系统的手动阀门的整体结构示意图。
36.图5是本技术实施例的一种用于氧舱舱体限位机构的手自动一体化控制系统的手动阀门的爆炸结构示意图。
37.附图标记说明:
38.1、舱体;11、侧壁;12、底板;121、第一通道;122、第二通道;2、舱门;3、泄气管;31、安装部;4、控制器;5、固定环;6、限位杆;7、电磁铁;8、压力传感器;9、计时器;10、警示灯;20、提示灯;30、手动阀门;40、阀体;50、把手。
具体实施方式
39.本技术实施例公开一种氧舱,参照图1,包括舱体1、舱门2、用于抵压舱门2的气缸和与气缸的第一气口连接的泄气管3。其中,舱体1包括侧壁11和底板12,舱门2与侧壁11滑动设置,用于将舱体1的内部空间与舱体1的外部空间分隔开,即起到密封舱体1的作用。气缸包括第一气口和第二气口,第二气口连接有通气管,泄气管3和通气管远离气缸的一端均与电磁泄压阀连接。在舱门2关闭后,通过控制电磁泄压阀使空气压缩机中的气体经由泄气管3进入到气缸内部,气缸的活塞杆受气体推动,做伸展运动;与此同时,气缸中的气体经由通气管排出,保证活塞杆的正常移动。
40.不难理解,若经由泄气管3进入到气缸内部的气体无法排出,气缸的活塞杆则无法做收缩运动。为了便于在电磁泄压阀失效时,使气缸的活塞杆可以做收缩运动,参照图2,本技术实施例中的泄气管3包括安装部31,且底板12上开设有用于供泄气管3穿设的第一通道121和第二通道122。泄气管3的一端依次穿过第一通道121和第二通道122后,安装部31处于舱体1内部,安装部31上安装有手动阀门30。
41.氧舱使用者可以通过扳动手动阀门30将气缸内部的气体经由泄气管3排出,使气
缸的活塞杆可以做收缩运动。
42.下面,结合上述的氧舱对本技术实施例的一种用于氧舱舱体限位机构的手自动一体化控制系统做详细阐述。
43.一种用于氧舱舱体限位机构的手自动一体化控制系统,参照图3和图4,包括控制器4、固定环5、限位杆6、电磁铁7、压力传感器8、计时器9、警示灯10、提示灯20和手动阀门30。结合图2,手动阀门30安装在泄气管3上,用于密封泄气管3或使泄气管3与外界连通。需要说明的是,密封泄气管3并不代表将泄气管3堵住,而是使气缸内的气体能够通过泄气管3流入到电磁泄气阀中,即泄气管3内的气体不会经由手动阀门30流动到泄气管3外界。反之,使泄气管3与外界连通,意为泄气管3中的气体能够经由手动阀门30流动到泄气管3外。
44.泄气管3安装有手动阀门30的部分位于舱体1内部,手动阀门30位于舱体1内部,便于使氧舱使用者通过扳动手动阀门30对气缸进行控制。
45.参照图4,手动阀门30包括阀体40和把手50,阀体40用于密封泄气管3或使泄气管3与外界连通,把手50用于驱动阀体40,改变阀体40状态。即通过扳动把手50,即可控制阀体40处于开启或关闭状态。阀体40处于关闭状态时,泄气管3为密封状态;阀体40处于开启状态时,泄气管3与外界连通。
46.参照图5,固定环5焊接在阀体40的外壁上,把手50上开设有通孔,限位杆6插设在通孔中,与把手50滑动设置。限位杆6的一端设有限位片,用于使限位杆6在向下滑动时,不易脱离通孔。压力传感器8与限位杆6远离限位片的一端连接,用于与固定环5的内壁接触。具体的,将把手50转动至使阀体40关闭时,限位杆6受重力影响,安装有压力传感器8的一端插入到固定环5中。
47.参照图3和图4,电磁铁7与把手50连接,用于在通电时,吸附限位杆6,使限位杆6向远离固定环5的方向移动,脱离固定环5。因此限位杆6为磁性杆,例如铁杆。控制器4用于控制电磁铁7得电或掉电,可以是mcu、单片机或集成芯片。
48.参照图3和图4,压力传感器8被配置为向控制器4传输检测的压力信号;控制器4被配置为在压力信号变化时,使电磁铁7得电。其中,压力信号变化可以通过预设阈值得知,例如预设压力变化阈值,控制器4将先后获得的两个压力信号进行比较,若差值大于压力变化阈值,使压力信号发生变化。也可以预设压力阈值范围,在控制器4获得的压力信号超过压力阈值范围时,视压力信号发生变化。不难理解,压力信号指压力传感器8测得的压力值。
49.警示灯10和提示灯20均安装在把手50上,且均为led灯。在压力信号变化时,控制器4被配置为使警示灯10闪烁。利于警示氧舱使用者,非必要无需扳动把手50。
50.计时器9与控制器4通信连接,被配置为在计时结束后,向控制器4传输计时信号。通信连接可以是有线连接,可以是无线连接,例如线缆连接、蓝牙连接等,旨在能够传输数据。控制器4被配置为在接收到计时信号时,控制电磁铁7得电,同时控制提示灯20常亮。
51.在设置计时器9时,将计时器9的计时时间设置成与氧舱使用者的单次使用时间相同,例如氧舱使用者每次使用氧舱的时长为30分钟,则将计时器9的计时时间设置为30分钟。
52.本技术实施例一种用于氧舱舱体限位机构的手自动一体化控制系统的实施原理为:在发现气缸的电磁泄气阀异常时,氧舱使用者可以在舱体1内部扳动手动阀门30,将泄气管3中的气体排放到舱体1内部。此时气缸中的气体得到释放,活塞杆可以产生收缩运动,
舱门2不再被气缸的活塞杆所抵紧,能够正常开启或者产生缝隙,有助于保证氧舱的使用安全性。
53.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1