一种辅助机器人外科手术用的血管阻断装置的制作方法
1.本实用新型涉及血管阻断技术领域,具体为一种辅助机器人外科手术用的血管阻断装置。
背景技术:
2.随着计算机和微电子技术以及医学科学的迅猛发展,各种用途的医用机器人在医学领域中得到越来越广泛的应用。在外科手术领域,一些手术由于手术时间长、工作强度大,医生往往会因为过度疲劳而产生失误,甚至会造成医疗事故。而目前有一些手术在切除组织前,需要借用专业的血管阻断装置来辅助机器人对血管进行阻断,血管阻断后再切除组织,能减少切除过程中的出血现象。
3.现有的辅助机器人外科手术用血管阻断装置使用存在着局限,无法帮助医生应对特殊情况下的血管阻断需求,为此,我们提出一种辅助机器人外科手术用的血管阻断装置。
技术实现要素:
4.本实用新型的目的在于提供一种辅助机器人外科手术用的血管阻断装置,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种辅助机器人外科手术用的血管阻断装置,包括启闭组件和金属环,用于控制启闭状态的所述启闭组件包括基板、容纳框、微型电动推杆、承载板、导向轨道、滑块和电磁铁吸附块,且基板的中部内嵌有容纳框,所述容纳框的内部右侧安置有微型电动推杆,且微型电动推杆的输出端连接有承载板,所述承载板的前端设置有导向轨道,且导向轨道上滑动设置有滑块,所述滑块的上方设置有电磁铁吸附块,所述金属环衔接于电磁铁吸附块的另一侧,且金属环的外侧设置有钳柄一,所述钳柄一的端部安装有夹持头一,且夹持头一的内侧衔接有阻血球囊,所述阻血球囊的一端通过输气管连接有电动充气设备。
6.进一步的,所述容纳框和微型电动推杆的横向中轴线相重合,且微型电动推杆和承载板为传动连接。
7.进一步的,所述导向轨道与承载板为嵌入式连接,且两个导向轨道之间相互平行。
8.进一步的,所述滑块通过电磁铁吸附块与金属环构成吸附连接,且金属环和钳柄一呈一体化结构。
9.进一步的,所述夹持头一和阻血球囊为紧密贴合,且夹持头一呈半圆环状。
10.进一步的,所述基板的左侧安装有安装座,且安装座的内部卡合设置有衔接板。
11.进一步的,所述钳柄一的后端通过活动栓转动设置有钳柄二,且钳柄二的端部固定有夹持头二。
12.本实用新型提供了一种辅助机器人外科手术用的血管阻断装置,具备以下有益效果:该辅助机器人外科手术用的血管阻断装置,采用启闭组件中各个零件相互配合,可代替人工完成血管阻断操作,减轻医生的工作强度,使其能够全神贯注在组织切除手术上,大大
提高外科手术的效率及安全性,为医务工作者提供便捷。
13.1、本实用新型电磁铁吸附块在通电后会产生磁性,能够与钳柄一手握部的金属环吸附固定,从而在微型电动推杆驱使承载板沿容纳框中作水平方向往复移动时,可携带钳柄一与钳柄二进行启闭操作,以通过夹持头一和夹持头二内侧的阻血球囊对血管进行夹紧,使血管闭合阻断且无损伤。
14.2、本实用新型阻血球囊呈弹性结构设计,其形状可在电动充气设备充入气体于阻血球囊内部后发生变化,而当钳柄一与钳柄二调整为交叉状态摆放时夹持头一与夹持头二会组合成一个圆环结构,通过将血管夹持在该圆环结构中,可在阻血球囊中充有气体并膨胀时对血管进行阻断,使手术安全得到保障。
15.3、本实用新型电动充气设备通过衔接板可与安装座构成卡合连接,从而在确保该装置中零件间的联结可靠性的同时,能有益于快速将电动充气设备于安装座上拆除,满足特殊情况下的血管阻断要求。
附图说明
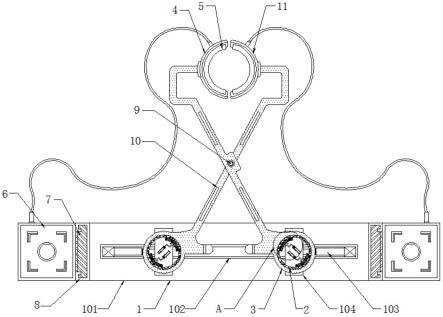
16.图1为本实用新型一种辅助机器人外科手术用的血管阻断装置的整体结构示意图;
17.图2为本实用新型一种辅助机器人外科手术用的血管阻断装置的基板立体结构示意图;
18.图3为本实用新型一种辅助机器人外科手术用的血管阻断装置的图1中a处放大结构示意图。
19.图中:1、启闭组件;101、基板;102、容纳框;103、微型电动推杆;104、承载板;105、导向轨道;106、滑块;107、电磁铁吸附块;2、金属环;3、钳柄一;4、夹持头一;5、阻血球囊;6、电动充气设备;7、衔接板;8、安装座;9、活动栓;10、钳柄二;11、夹持头二。
具体实施方式
20.如图1-3所示,一种辅助机器人外科手术用的血管阻断装置,包括启闭组件1和金属环2,用于控制启闭状态的启闭组件1包括基板101、容纳框102、微型电动推杆103、承载板104、导向轨道105、滑块106和电磁铁吸附块107,且基板101的中部内嵌有容纳框102,容纳框102的内部右侧安置有微型电动推杆103,且微型电动推杆103的输出端连接有承载板104,容纳框102和微型电动推杆103的横向中轴线相重合,且微型电动推杆103和承载板104为传动连接,承载板104的前端设置有导向轨道105,导向轨道105与承载板104为嵌入式连接,且两个导向轨道105之间相互平行,且导向轨道105上滑动设置有滑块106,滑块106的上方设置有电磁铁吸附块107,电磁铁吸附块107在通电后会产生磁性,能够与钳柄一3手握部的金属环2吸附固定,从而在微型电动推杆103驱使承载板104沿容纳框102中作水平方向往复移动时,可携带钳柄一3与钳柄二10进行启闭操作,以通过夹持头一4和夹持头二11内侧的阻血球囊5对血管进行夹紧,使血管闭合阻断且无损伤;
21.如图1所示,金属环2衔接于电磁铁吸附块107的另一侧,且金属环2的外侧设置有钳柄一3,滑块106通过电磁铁吸附块107与金属环2构成吸附连接,且金属环2和钳柄一3呈一体化结构,钳柄一3的端部安装有夹持头一4,且夹持头一4的内侧衔接有阻血球囊5,夹持
头一4和阻血球囊5为紧密贴合,且夹持头一4呈半圆环状,阻血球囊5的一端通过输气管连接有电动充气设备6,阻血球囊5呈弹性结构设计,其形状可在电动充气设备6充入气体于阻血球囊5内部后发生变化,而当钳柄一3与钳柄二10调整为交叉状态摆放时夹持头一4与夹持头二11会组合成一个圆环结构,通过将血管夹持在该圆环结构中,可在阻血球囊5中充有气体并膨胀时对血管进行阻断,使手术安全得到保障;基板101的左侧安装有安装座8,且安装座8的内部卡合设置有衔接板7,钳柄一3的后端通过活动栓9转动设置有钳柄二10,且钳柄二10的端部固定有夹持头二11,电动充气设备6通过衔接板7可与安装座8构成卡合连接,从而在确保该装置中零件间的联结可靠性的同时,能有益于快速将电动充气设备6于安装座8上拆除,满足特殊情况下的血管阻断要求。
22.综上,该辅助机器人外科手术用的血管阻断装置,使用时,首先根据图1-3所示的结构,钳柄一3通过活动栓9与钳柄二10相连接,夹持头一4和夹持头二11对应设置在钳柄一3的端部及钳柄二10的端部,在使用该装置辅助机器人进行组织切除手术时,可先将钳柄一3和钳柄二10如图1所示放置在承载板104的前端位置,再将与电磁铁吸附块107固定的滑块106沿导向轨道105上滑动,使弧状的电磁铁吸附块107可以紧贴在金属环2内壁上,此时通过接通电磁铁吸附块107的电源,
23.利用通电后产生磁性的电磁铁吸附块107对钳柄一3手握部的金属环2进行吸附,由此完成对钳柄一3和钳柄二10活动轨迹的限定,接着使用微型电动推杆103驱使承载板104及与之相连的零件沿容纳框102内朝着钳柄二10方向水平移动,而钳柄二10也在驱使作用下朝着钳柄一3方向移动,此时夹持头一4和夹持头二11之间距离拉大,可便于夹取血管,当血管置于夹持头一4和夹持头二11之间位置时,可控制微型电动推杆103驱使承载板104朝着远离基板101竖直中轴线的方向移动,来通过夹持头一4和夹持头二11闭合形成圆环状对血管进行夹持,此时由电动充气设备6充入气体于呈弹性结构的阻血球囊5中,可随着阻血球囊5膨胀来对血管进行压迫,完成血管阻断操作,以避免在组织切除手术中大量出血,夹持头一4和夹持头二11由启闭组件1所控制开合状态,此外电动充气设备6通过衔接板7可与安装座8卡合相连,当该装置无法适应当前场景需要时,医生可断开电磁铁吸附块107电源,将钳柄一3和钳柄二10于启闭组件1中卸下,通过徒手握持钳柄一3和钳柄二10的方式来控制夹持头一4和夹持头二11的开合状态以及实现阻断血管,从而解决特殊情况下血管无法由装置直接进行阻断的弊端,同时满足了手动以及机械控制的使用要求。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1