用于生成外骨骼轨迹和使外骨骼运动的方法与流程
1.本发明涉及外骨骼型机器人领域。
2.更确切地说,涉及一种用于生成外骨骼轨迹的方法和用于使外骨骼运动的方法。
背景技术:
3.最近,对于有严重行动障碍的人,如截瘫患者,出现了被称为外骨骼(exoskeleton)的辅助行走装置,这是操作者(人类使用者)通过紧固件系统“穿上”的外部机器人装置,将外骨骼的运动与他们自己的运动联系起来。下肢的外骨骼有几个关节,一般至少在膝盖和臀部,以再现步态运动。致动器使移动这些关节成为可能,而这些关节又使操作者移动。界面系统允许操作员向外骨骼发出命令,命令系统将这些命令转换为致动器的命令。传感器也是该设备的补充。
4.这些外骨骼构成了与轮椅相比的进步,因为它们允许操作员站起来行走。外骨骼不再受到轮子的限制,理论上可以在大多数非平坦的环境中移动:与腿相反,轮子不可能跨越实质性的障碍,如台阶、楼梯、过高的障碍等。
5.然而,在使用过程中,这些外骨骼没有一个能执行自主的人类步态,即在各种地形上都是稳定和可行的,即拟人化的和无辅助的。
6.在大多数情况下,这些限制是由设备不可能管理平衡或步态本身的方向而实现的。然后,这两项任务通常被转移到操作者身上,由他们通过拐杖来完成,例如rewalk的us7153242号专利或ekso-bionics的us2016038371号申请中就提出了这一点。
7.rex-bionics公司专利ep2231096描述了唯一一种可以在没有外部帮助的情况下为无法确保自身稳定性的人使用的外骨骼。第[0122]段描述的控制原理清楚地解释了将压力中心(地面对系统施加的反作用力矩为零的物理点)从支撑多边形的一部分(与地面接触点的凸面包络)转移到支撑多边形的另一部分的必要性。
[0008]
这种限制造成了极慢的步态(每分钟几米,而正常的步态超过2公里/小时,即每分钟33米),步幅很短(小于30厘米,而正常的步幅为50至80厘米),在此期间,支撑脚一直与地面保持平坦接触。因此可以进入的环境类型是有限的,因为不平坦的地形事实上被排除在外。同样,最轻微的障碍物,例如石头,一个小物体,如果它在给定时刻将脚踩在上面,就会产生系统失衡的风险,并最终导致系统坠落。
[0009]
相反,“自然”人类步态的特点是一系列阶段,在这些阶段中,双脚可以平放在地面、空中或在地面上滚动,如图1所示。这种滚动脚的能力对于步态至关重要,因为它使人们有可能迈出更大的步伐,并允许在各种地形上保持稳定。
[0010]
然而,上述所谓的第一代外骨骼没有被致动的脚,或将支撑脚保持在地面上。
[0011]
对于两足类人机器人或机器人设备来说,执行这种滚动确实很复杂。即使提供如申请wo2015140353中提出的具有断裂的足部结构,当压力中心达到支撑多边形的极限时,系统开始围绕该点滚动,因此不再处于静态平衡。
[0012]
在步态的情况下,脚的滚动涉及支撑脚处与地面的部分失去接触,并产生几个后
果:
[0013]-支撑多边形(支撑面)减少,可能减少到一个点,使得压力中心很难甚至不可能维持在支撑多边形内;
[0014]-系统处于欠致动的情况,即它不能再在其所有自由度上行动。所有的运动都不再可能。
[0015]
在这种情况下,传统的平足步行形式(如文件kajita s.,k.f.(2003)《使用零力矩点的预览控制生成两足行走模式》,icra,(第1620-1626页)中所述)或专利rex-bionics ep2231096中描述的原理不再适用。
[0016]
一种自然的想法是将摆动的腿放在前面,并将第二只脚放在地面上,以返回到支撑多边形并保持平衡,同时系统围绕支撑脚自由旋转,有点处于“下降”过程中。这被称为动态步态,因为身体会经历一系列不稳定的姿势,但只是短暂的(如果“停止”,则在迈步中间的人会摔倒)。
[0017]
在这种动态步态方法中,使摆动的脚快速进入一个至少短暂地重新建立平衡的位置是复杂的。事实上,如果让这只脚按照预先计算好的时间配置的轨迹走,这只脚就有可能过早或过晚地落地,因为欠致动系统的行为无法控制,即使受到轻微干扰(不可能纠正稍微偏离计划的轨迹)。这可能会给操作者带来不适,使他们失去平衡,甚至导致他们跌倒,包括在简单的地形上。
[0018]
正因为如此,所有第一代外骨骼(和许多仿人机器人)都试图通过保持支撑脚的平坦来避免这种类型的情况,从而对步态速度、步长、允许的地形类型和步态的总体稳定性造成上述限制。
[0019]
因此,在申请wo2018130784中提出了一种新的外骨骼步态范式,它结合了“虚拟约束”和“混合零动力学”(hzd)的原则,允许快速和自然的步态,即使在困难和未计划的地形上也没有跌倒或失衡的风险。
[0020]
传统上,轨迹(即每个自由度的变化)表示为时间的函数。系统的“动力学”由下面函数定义
[0021][0022]
并且起始点由下面函数定义
[0023]
ξ∈χ
[0024]
函数f写成
[0025]
x
′
t
=f(x
t
,u
t
,t),x0=ξ
[0026]
χ是外骨骼1的状态空间,u是控制空间,t代表时间。
[0027]
相反,hzd是非被致动自由度的动力学。这种动力学被称为“零”,因为它对应于命令不能/不想执行的程度,即命令为0,并且“混合”,因为脚在地面上的冲击施加了与连续相位相交的不连续瞬时相位。
[0028]
在所谓的“虚拟约束”方法中,其原理是为选择的被动自由度定义一个由变化参数配置的轨迹,不是由时间配置,而是直接根据配置,该参数称为相位变量。这种相位变量的一个例子是脚后跟-臀部轴线和垂直线之间的角度,它构成了上文提到的非致动自由度。
[0029]
相位变量可以定义步伐的“进度”。更准确地说,在每一步中,相位变量不断地从初始值切换到最终值,然后再次为其分配初始值:这是下一步的开始。为了方便起见,相位参
数的值可以在0和1之间归一。
[0030]
变化参数的每个值对应于系统必须强制自身遵循的被致动自由度的值:这些关系(以这种方式控制的每个被致动自由度一个)被称为虚拟约束。
[0031]
如果系统在可能或希望行动的自由度上完全遵循这一轨迹,换句话说,如果这些自由度的虚拟约束得到遵守,那么系统的变化就完全由遵循其自身动力学的非致动自由度决定,即hzd。
[0032]
因此,对虚拟约束的良好选择可以使该动力学包含有吸引力的周期性“轨道”,即系统自然吸引的稳定轨迹。
[0033]
这种方法hzd提供了极大的满足,但困难在于轨迹的生成(此外,“平足”方法也是如此)。事实上,可以观察到,与上面提到的图1中所示的自然步态相反,从脚上“几乎不滚动”获得的轨迹,即脚实际上保持水平(脚跟和脚趾几乎不离开地面),其中滚动被标记。
[0034]
然而,用于生成轨迹的算法在理论上完全可以实现与自然人步态一样明显的滚动阶段,但由于它们通常是基于对非凸、非线性问题进行优化的方法,在约束条件下,它们更倾向于被认为是更稳定的“最佳”轨迹,而不利于更“拟人化”的轨迹,但这将是外骨骼的人类操作员所喜欢的。
[0035]
因此,希望有一种用于生成轨迹的新解决方案,该解决方案在不损害轨迹稳定性的情况下增加轨迹的自然侧。
技术实现要素:
[0036]
因此,根据第一方面,本发明涉及一种用于生成具有两条腿的外骨骼的轨迹的方法,每条腿有一只脚,该方法包括通过服务器的数据处理装置实现以下步骤:
[0037]
(a)获得定义外骨骼的给定步态的步态参数的至少一个n元组;
[0038]
(b)为步态参数的所述n元组生成外骨骼的至少一个周期性基本轨迹,使得所述周期性基本轨迹依次包括第一轨迹部分和第二轨迹部分,使得在所述第一轨迹部分中每只脚执行纯旋转,在所述第二部分中仅一只脚执行平移。
[0039]
根据有利和非限制性特征:
[0040]
所述基本周期性轨迹循环地重复所述第一轨迹部分然后是第二轨迹部分的顺序。
[0041]
在所述第二轨迹部分中,执行平移的脚是初始后脚,初始前脚执行纯旋转。
[0042]
所述初始前脚在所述第二轨迹部分期间保持不动。
[0043]
在所述第一轨迹部分的结尾处,前脚平放在地面上。
[0044]
步骤(b)通过使用至少一个神经网络来实现。
[0045]
所述外骨骼接收人类操作员,步骤(a)包括确定所述操作员所需的外骨骼步态参数的n元组序列。
[0046]
对于所述序列的每个n元组,生成的外骨骼轨迹包括新的基本周期性轨迹和到所述新的基本周期性轨迹的过渡。
[0047]
根据第二方面,本发明涉及一种用于使外骨骼运动的方法,该外骨骼具有多个自由度,其中至少一个自由度由数据处理装置控制的致动器致动,所述方法包括步骤(c):由外骨骼的数据处理装置执行由根据第一方面生成外骨骼的轨迹的方法生成的外骨骼的轨迹,以使所述外骨骼行走。
[0048]
根据第三方面,本发明涉及一种包括第一服务器和外骨骼的系统,所述第一服务器和外骨骼各自都包括数据处理装置,其特征在于,所述数据处理装置被配置为实施根据第一方面的方法来生成外骨骼的轨迹和/或根据第二方面的方法来使外骨骼运动。
[0049]
根据第四和第五方面,本发明涉及一种计算机程序产品,包括用于执行根据第一方面生成外骨骼轨迹的方法和/或根据第二方面使外骨骼运动的方法的代码指令;以及能够由计算机设备读取的存储装置,在所述计算机程序产品上包括用于执行根据第一方面生成外骨骼轨迹的方法和/或根据第二方面使外骨骼运动的方法的代码指令。
附图说明
[0050]
本发明的其他特点和优点将在阅读以下优选实施例的描述时显现出来。该描述将参考附图给出,其中:
[0051]-图1显示了人类的步态;
[0052]-图2是根据本发明的方法使用的外骨骼图;
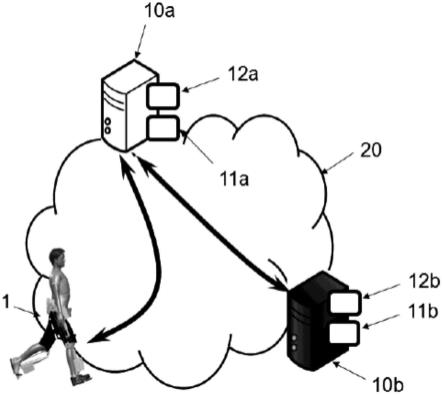
[0053]-图3是用于实施根据本发明的方法的架构图;
[0054]-图4是显示优化问题结构的图,描述了在本发明的示例实施例中描述步态轨迹的所有阶段,其中外骨骼的足部滚动。
具体实施方式
[0055]
架构
[0056]
在根据本发明的另外两个方面,提出了以下内容:
[0057]-一种用于生成外骨骼1的轨迹的方法;以及
[0058]-一种用于使外骨骼1运动的方法(应用根据第一方面的方法生成的轨迹)。
[0059]
参照图2,所述外骨骼1是一个被致动和控制的双足机器人装置类型的铰接机械系统,具有两条腿,更精确地接收人类操作者,他们的下肢分别牢固地连接到外骨骼1的一条腿上(特别是由于皮带)。它也可以是或多或少的人形机器人。术语“步态”在这里指的是使机器人设备1运动,这在实践中会导致在站立位置上对腿部的替代性支撑,以这种方式产生位移。
[0060]
外骨骼1有多个自由度,即可变形的关节(通常通过旋转),即可相对于彼此移动,每个自由度要么是“致动的”,要么是“非致动的”。
[0061]
致动自由度指的是具有由数据处理装置11c控制的致动器的关节,即该自由度是受控的并且可以作用于其上。相反,非被致动自由度指的是没有致动器的关节,即这个自由度遵循其自身的动力学,数据处理装置11对其没有直接的控制(而是先验地通过其他被致动自由度进行间接控制)。在图1的示例中,脚跟与地面接触是准时的,因此外骨骼1可以相对于该接触点自由旋转。后跟-臀部轴线与垂直线之间的角度构成非被致动自由度。
[0062]
本发明的外骨骼自然包括至少一个致动自由度,优选多个,以及至少一个非致动自由度,即它是“欠致动的”,如上所述。非驱动自由度的数量称为欠驱动度。
[0063]
数据处理装置11c指定一个计算机设备(通常是处理器,或者如果外骨骼1是“远程控制的”但优选嵌入在外骨骼1中,则为外部的,参见下文)适于处理指令并生成用于各种致动器的命令。后者可以是电动的、液压的等。
[0064]
本技术不限于外骨骼1的任何架构,以申请wo2015140352和wo2015140353中描述的为例。
[0065]
因此,优选地,根据这些申请,外骨骼1在每条腿上包括一个脚部结构,该结构包括支撑平面,穿戴外骨骼的人的腿的脚可以靠在上面。
[0066]
该支撑方案包括前平台和后平台,使得脚枢轴连接将前平台连接到后平台,构成非致动自由度。
[0067]
然而,本领域技术人员将知道如何使本方法适应任何其他机械架构。
[0068]
根据一个优选实施例,用于生成轨迹和步态的本方法可以涉及在诸如图3所示的架构内的第一甚至第二服务器10a、10b。
[0069]
第一服务器10a是用于生成轨迹的服务器,第二服务器10b是可能的学习服务器。
[0070]
实际上,生成外骨骼1的轨迹可以使用神经网络,特别是“前馈”类型(fnn,“前馈神经网络”),例如在申请fr1910649中提出的。然后,第二服务器10b是用于实施用于学习所述神经网络的参数的方法的服务器。注意,本方法不限于使用神经网络,并且可以使用任何已知技术来生成整个轨迹,甚至更进一步。
[0071]
在任何情况下,这两个服务器完全有可能混淆,但实际上第二服务器10b通常是远程服务器,而第一服务器10a可以嵌入外骨骼1中以实时操作,例如在图2中所示。根据一个优选实施例,第一服务器10a通过使用从第二服务器10b检索到的参数的神经网络来实现生成外骨骼1的轨迹的方法,并且外骨骼1直接应用所述原位生成的轨迹来使自身运动。
[0072]
这些服务器10a、10b中的每一个通常都是连接到扩展网络20的计算机设备,例如用于交换数据的互联网网络,尽管在实践中,一旦神经网络被学习并嵌入到第二服务器10b上,通信就可以中断,至少是间歇性的。每个服务器都包括处理器类型的数据处理装置11a、11b(尤其是第二服务器的数据处理部件11b具有强大的计算能力,因为相对于学习神经网络的简单使用而言,学习的时间长且复杂),以及在适用的情况下数据存储装置12a、12b,例如计算机存储器,例如硬盘驱动器。在通过神经网络生成轨迹的情况下,可以由第二服务器10b的存储器12b存储学习数据库。
[0073]
可以理解的是,可以有多个外骨骼1,每个都嵌入它们的第一服务器10a(然后它可以具有有限的功率和大小,因为它只为它所专用的外骨骼1生成轨迹),或者多个外骨骼1,每个都连接到更强大的第一服务器10a,并可能与第二服务器10b混淆(并且具有为所有外骨骼1即时生成轨迹的能力)。
[0074]
发明原理
[0075]
如前所述,外骨骼的术语“轨迹”通常是指每个自由度(特别是致动的)的变化,表示为时间或相位变量的函数。
[0076]
此外,如何将“复杂”的轨迹定义为被称为“基本”的周期性轨迹的序列,并与过渡相交。术语“周期性轨迹”是指在步伐的持续时间内应用的任何轨迹(在适用情况下重复应用),其方式是在步伐开始时(脚接触的时刻)从外骨骼1的初始状态开始,在下一个步伐开始时恢复到相同的状态(正如解释的那样,这包括任何平坦的步态,但也包括在坡道上、上下楼梯等)。也可以说,周期性轨迹形成“极限循环”。因此,所述周期性轨迹可以以稳定的方式应用于任何数量的步伐。
[0077]
换句话说,每个基本轨迹都与外骨骼1的一个给定步态相关(步态由步态参数的n
元组定义),并使其有可能以稳定和可行的方式保持该步态(即,正如将看到的那样,符合优化问题的所有约束,并尽可能最小化成本函数)。正如所解释的那样,所述步态参数对应于行走方式的“特征”,如步长、步态频率和胸部的倾斜度,但也包括在走楼梯的情况下台阶的高度,曲线运动的瞬间旋转角度;还有操作者的形态特征(被称为患者参数的步态参数的子组),如他们的腰围、体重、大腿或胫骨的长度、质量中心的位置(向前方的偏移值)和康复活动框架中胸部的横向间隙。
[0078]
上文提及的步态的所述“约束”可以变化并且取决于所需的步态类型,例如“平足”步态或“hzd”。本方法将不限于任何类型的所需步态。
[0079]
过渡对应于步态的变化,即所述步态参数值的变化(例如步长的增加):知道一组初始步态参数和一组最终步态参数,因此知道初始周期性轨迹轨迹(与初始步态参数集合相关)和最终周期性轨迹(与最终步态参数集合相关),所述过渡是轨迹片段,使得从初始周期性轨迹切换到最终轨迹成为可能。请注意,必须有“初始”或“最终”过渡,如下文所述。
[0080]
本方法的巧妙之处在于注意到有可能在一个周期性的基本轨迹中强加两个子部分,以使其更明显地具有拟人性。在被称为“滚动”的轨迹的第一部分中,两只脚与地面接触,每只脚都执行纯旋转运动:后脚(至少与“脚尖
”‑
通常是脚部结构的一个前平台-接触,并且-有利地,最初是完全接触,即平的)逐步抬起脚跟,前脚(只与脚跟接触)逐步摆出脚尖的姿势(图1的前两张图片),然后在被称为“摆动”或简单的“踏步”的第二部分中,前脚保持与地面接触,另一只脚则是空的(这被称为“脚的间隙”)并执行平移运动(当然可以包括各种旋转):换句话说,这只初始后脚打破与地面的接触,从前面经过,然后用脚跟与地面接触(图1的最后三张图片)。在这个阶段,两只脚与地面的接触与第一部分开始时的情况相反(后脚变成了前脚),但配置相同(后脚在脚尖处接触,甚至是平的,前脚仅在脚跟处接触):已经迈出了一步,可以对称地重复第一和第二部分,依此类推(给出轨迹的“周期性基本”性质)。
[0081]
请注意,“前”和“后”的概念是根据步态的方向定义的:总是有一只前脚和一只后脚,后者在每一步都是相反的。
[0082]
因此,每个基本周期性轨迹由第一部分和第二部分构成,第一部分和第一部分的链接构成一个可以重复的循环(通过在每个循环中反转左脚和右脚)。
[0083]
这些第一和第二部分的存在可以通过在轨迹生成期间添加条件以及通过将轨迹参数的连续性从一个部分应用到另一个部分来施加。
[0084]
这些条件有利地如下:
[0085]-对于第一部分,每只脚,优选前脚的纯旋转(根据单个旋转轴的均匀旋转)
[0086]
在第一部分的结尾处是平的;
[0087]-对于第二部分,仅(初始)后脚的间隙和平移,直到它再次接触地面(通过成为新的前脚,导致“最初的”一词),在这期间(初始)前脚纯旋转,甚至前脚不动。
[0088]
请注意,这种分解成两部分的方式并不是人类实际所做的,这两部分事实上存在于实际的人类步态中,但却没有那么明显(前脚的一部分旋转是与平移运动同时进行的),但这种“夸张”使得在实践中可以迫使外骨骼1的步态更加自然。此外,这些条件似乎是非常限制性的,但在实际情况下,我们观察到稳定性根本没有改变,轨迹的生成也没有变得更复杂。
[0089]
正如将要看到的,甚至有可能在过渡中定义这些第一和第二部分,特别是初始和最终过渡。
[0090]
第一和第二轨迹部分
[0091]
图4显示了初始过渡、然后是步伐和最终过渡的优选示例。应首先从第一部分(滚动阶段)开始描述该步伐,即基本周期性轨迹。在图4的示例中,左脚(虚线
–
右脚在实线中))是前脚。本领域技术人员自然可以将示例转置到图中的情况。
[0092]
因此,“循环滚动”定义了周期“循环”轨迹的第一部分。每只脚的运动在三面体上定义为根据三个轴的三个速度和根据三个轴的三个旋转。可以看出,强加了以下几点:
[0093]-对于右(后)脚,连续性和v
x
=vy=vz=ωr=ωy=0,仅ω
x
≠0允许纯旋转;
[0094]-对于左(前)脚,连续性和v
x
=vy=vz=ωr=ωy=0,仅ω
x
≠0允许纯旋转,输出位置p=0,即脚是平的(“零”位置)。
[0095]-每只脚在运动过程中都受到一个非零的垂直力的作用,这个力揭示了地面对脚的反应。
[0096]
当前脚到达输出位置时,控制转到周期性轨迹的第二部分的“循环步”情况。可以看出,强加了以下几点:
[0097]-对于左(前)脚,连续性和v=0,即纯旋转。
[0098]-对于右(后)脚,连续性和脚间隙
[0099]-右脚以不受任何力的方式在空中。
[0100]
这以“循环性”结束,即在这第二部分的结尾处,外骨骼1的完整配置必须等于循环滚动(第一部分)开始时的配置的对称性,循环滚动通过左脚(lf)和右脚(rf)的反转再次开始。
[0101]
在图4的情况下,假定这是从一个给定的起始姿势(从不动的位置、站立等)开始的初始过渡。正如所解释的那样,通过与基本周期性轨迹的第一和第二部分相类比,有可能再次出现这种过渡的第一和第二部分。在这里,我们认为这是从“左脚在后”的起始滚动开始的,但这是一个任意的选择,可以做相反的事情,在实践中两只脚通常是并排的。如上文所述,这会对脚施加纯粹的旋转,但在实践中,甚至可能使脚在平坦时保持不动,仅骨盆处于运动状态。这个想法是为了触发运动的动态。
[0102]
然后,这与该初始过渡的第二部分(起始步伐)链接在一起,其中右脚不移动(或至少只执行纯旋转)并且左脚是空的,直到它再次到达地面:周期性轨迹可以然后开始,更准确地说是第一部分(循环滚动)。
[0103]
类似地,图4显示了根据周期性第一轨迹部分的最终过渡情况。通过与初始过渡对称,这从第二部分(停止步伐)开始,以第一部分(停止滚动)结束。请注意,停止步伐的部分与周期性轨迹的第二部分相同,左脚固定,右脚清晰(这也是任意的,可以执行完全相反的操作)。唯一的区别是,在这种类型的过渡中,计算出的运动通常只看到后脚达到前脚的水平,而不是超过步态中的水平。在停止滚动的部分,最多可以再次进行脚的旋转,外骨骼1被固定,直到达到最终姿势(例如固定位置、站立等)。
[0104]
方法
[0105]
根据第一方面,提出了用于生成外骨骼1的轨迹的方法,由服务器10a的数据处理装置11a实现。用于生成外骨骼1的轨迹的所述方法从所述步骤(c)开始,即获得至少一个定
义外骨骼1的给定步态的步态参数的n元组,甚至逐步获得步态参数的n元组序列(例如由于来自外骨骼的操作者的新命令)。
[0106]
在主要步骤(b)中,该方法包括为所述n元组的步态参数生成外骨骼1的至少一个周期性基本轨迹,如上所述,使得所述周期性基本轨迹依次包括第一轨迹部分和第二轨迹部分,使得在所述第一轨迹部分中,每只脚执行纯旋转,在所述第二部分中,仅一只脚执行平移(脚间隙,另一只脚执行纯旋转,即使不动)。
[0107]
对于n元组序列,对于每个新的n元组参数,确定新的周期性轨迹,并向该新周期性轨迹过渡。
[0108]
为此,用于生成轨迹的方法有利地包括确定(在适用的情况下以规则方式重复)外骨骼1的n元组步态参数,即重复步骤(a)。
[0109]
实际上,尽管外骨骼1是接收人类操作员的外骨骼,但确定所述参数的是所述人类操作员的姿势(可能还有按钮的按压)(与可直接接收包括门速度和/或方向设定点的启动请求的普通机器人的情况相反)。
[0110]
为此,可向操作员提供传感器护套15,使其有可能检测其胸部的配置(后者的定向)。操作员将胸部定向的方向是他们希望行走的方向,速度由他们将胸部向前放置的强度给出(他们倾斜的程度)。启动请求可以对应于操作员按下按钮(或特定姿势),以表示其开始行走的意图,并因此命令数据处理装置确定所述参数。某些参数,如瞬时旋转角度或在走楼梯时的台阶高度,可以预先确定或通过其他传感器13、14获得。
[0111]
轨迹本身的生成将不限于任何已知技术,本发明的目的仅在于在生成期间以获得第一和第二部分的方式应用上述约束。
[0112]
所解释的优化工具是特别已知的,尤其能够根据所选择的步态约束和参数生成给定轨迹。例如,在hzd轨迹的情况下,生成轨迹的问题是以最佳控制问题的形式提出的,该问题优选通过所谓的直接搭配算法来解决,见文件omar harib等人,《截瘫者外骨骼的反馈控制
‑‑
走向稳健的无手动态行走》。
[0113]
如前所述,也可以使用在学习轨迹数据库上训练的神经网络。
[0114]
可以考虑使用第一神经网络来生成轨迹的第一部分,以及使用第二神经网络来产生轨迹的第二部分。因此,在轨迹的第一部分的学习基础上学习第一网络和在轨迹的第二部分的学习基上学习第二网络就足够了。
[0115]
根据第二方面,提出了一种用于使外骨骼运动的方法1,该方法包括实施根据第二方面的用于生成外骨骼轨迹的所述方法(步骤(a)、(b)),然后(在标记为(c)的步骤中)以外骨骼1行走的方式执行所述轨迹。
[0116]
可以重复步骤(b)和(c),以便始终实时校正外骨骼1的轨迹。
[0117]
装置和系统
[0118]
根据第三方面,本发明涉及用于实施根据第一和/或第二方面的方法的系统。
[0119]
如所解释的,该系统包括可能混淆的第一服务器10a、可能的第二服务器10b和外骨骼1。
[0120]
第一服务器10a包括用于实施根据第一方面的方法的数据处理装置11a。
[0121]
外骨骼1包括被配置为实施根据第二方面的方法的数据处理装置11c,以及如有必要,数据存储装置12(特别是第一服务器10a的那些)、惯性测量装置14(惯性测量单元)、用
于检测脚在地面上的撞击的装置13(接触传感器或可能的压力传感器),和/或传感器护套15。
122.其具有多个自由度,其中至少一个自由度由在实施根据第三方面的方法的框架中由数据处理装置11c控制的致动器驱动。
[0123]
计算机程序产品
[0124]
根据第四和第五方面,本发明涉及一种计算机程序产品,包括用于(在处理装置11a、11c上)执行根据第一方面的用于生成外骨骼1的轨迹的方法和/或根据第二方面的用于使外骨骼1运动的方法的代码指令,以及能够由在其上发现该计算机程序产品的计算机设备读取的存储装置。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1