压力波装置的制作方法
压力波装置
1.本发明涉及压力波装置和用于操作该压力波装置的方法。
2.这样的压力波装置旨在通过使用压力波来治疗人或动物,压力波由加速的抛射物在冲击本体上的冲击产生,并且这样的压力波装置在现有技术中是公知的。例如,ep 2 529 792a1和ep 2 381 864b1描述了这样的压力波装置。
3.通常,压力波装置具有用于使抛射物加速的气动驱动元件。特别地,气动驱动元件旨在使抛射物加速,抛射物又撞击与应被治疗的组织表面接触或接近的冲击本体。在冲击本体中产生的压力波通过经由靠近冲击本体或与冲击本体接触的表面或皮肤进入患者的身体而传递到患者的组织中。
4.为了向手持件供应气体以使抛射物加速,通常存在作为气动驱动元件的一部分的压缩机。此外,压力波装置包括用于调节气动驱动元件的操作参数、优选地频率和/或压力的控制装置。例如,ep 2 381 864b1提出了一种压缩机,该压缩机使其功率适于调节所产生的压力波的强度。此外,结果表明,有利的是,使用至少两个压缩机,所述至少两个压缩机可以用于调节压力驱动装置的期望的功率水平。
5.然而,同时使用若干压缩机会增加噪声水平,这使患者感到不舒适。考虑到现有技术,本发明的目的是提供一种改进的压力波装置,特别是在操作期间具有降低的噪声水平的压力波装置。
6.该问题通过根据权利要求1的压力波装置和根据权利要求12的用于操作压力波装置的方法来解决。优选实施方式并入从属权利要求、说明书和附图中。
7.根据本发明的第一方面,提供了一种用于治疗生物组织的压力波装置,该压力波装置包括:
[0008]-手持件,
[0009]-气动驱动元件,该气动驱动元件使手持件的抛射物加速,以及
[0010]-第一压缩机和第二压缩机,第一压缩机和第二压缩机用于向气动驱动元件供应气体以用于使抛射物加速,
[0011]
其中,压力波装置构造成能够在下述模式之间进行切换:
[0012]
‑‑
第一操作模式,仅第一压缩机向气动驱动元件供应气体,以及
[0013]
‑‑
第二操作模式,至少第二压缩机向气动驱动元件供应气体。
[0014]
与现有技术相比,尽管两个压缩机都是可用的,但可以切换至第一操作模式,在第一操作模式下,仅一个或单个压缩机,即第一压缩机或者第二压缩机向气动驱动装置供应气体。然而,在更高的气体需求的情况下,可以至少启用第二压缩机。优选地,压力波装置构造成在仅第一压缩机向气动驱动元件供应气体或者仅第二压缩机向气动驱动元件供应气体的第一操作模式与第一压缩机和第二压缩机向气动驱动元件供应气体的第二操作模式之间进行切换。
[0015]
因此,由两个压缩机产生的噪声水平限于需要大量的气体或高压的特定应用,该大量的气体或高压必须通过第一压缩机和第二压缩机建立。这被证明是有利的,因为两个压缩机同时工作可能会由于共振效应而产生极大的噪声水平,特别是当驱动压缩机的发动
机没有精确的速度控制时更是如此,而这建立了第一压缩机和第二压缩机的异相操作。因此,使用始终同时操作的第一压缩机和第二压缩机的现有技术的系统往往会基于同相共振效应产生极大的噪声水平。
[0016]
优选地,压力波装置构造成能够在仅第一压缩机向气动驱动元件供应气体或者仅第二压缩机向气动驱动元件供应气体的第一操作模式与第一压缩机和第二压缩机向气动驱动元件供应气体的第二操作模式之间进行切换。因此,可以例如根据需要操作压力波装置,使得仅一个压缩机操作或至少两个压缩机操作。
[0017]
优选地,压力波装置包括抛射物和冲击本体,该抛射物被加速并且撞击在冲击本体上,以用于产生压力波。特别地,抛射物在用于导引抛射物的管件的内部被加速,并且执行通过气动驱动元件的加压气体开始的向后和向前的运动。优选地,气动驱动元件提供了用于使抛射物在管件内加速的加压气体。此外,气动驱动元件、特别地第一压缩机和第二压缩机不是包括有抛射物、管件和冲击本体的手持件的一部分,而是结合到与手持件间隔开并且经由管连接至手持件的基站中。此外,可以设想的是,手持件具有调整单元以及启用开关,其中,设置调整装置以用于调节气动驱动元件的参数、特别地频率和/或压力,并且其中,启用开关触发压力波事件。特别地,可以设置的是,第一压缩机与第二压缩机并联连接。
[0018]
在治疗期间,压力波装置通过将冲击本体放置在皮肤上而位于被治疗的组织的皮肤上。在操作期间,冲击本体中所产生的压力波进入皮肤并且行进穿过组织、特别地行进至由压力波治疗的感兴趣的区域。
[0019]
优选地,压力波装置包括控制单元,该控制单元用于调节要求的气体的量,以便向气动驱动元件供应气体。特别地,可以从压力波装置的操作者设定的参数中计算实现压力波装置的期望的参数所需的要求的气体的量。基于要求的气体的水平或要求的气体的量,控制单元可以决定压力波装置必须在第一操作模式下操作还是在第二操作模式下操作。特别地,存在可以由操作者设定的要求的气体的量的阈值,其中,将由控制单元设定的要求的气体的量与阈值进行比较以决定使用第一操作模式还是使用第二操作模式。特别地,如果要求的气体的量超过限定的阈值,则压力波装置自动从第一操作模式切换至第二操作模式。因此,控制单元优选地构造成使第一压缩机和/或第二压缩机启动或停止、特别地自动启动或停止。优选地,压力波装置构造成在由控制单元确定的要求的气体的量超过阈值时从第一操作模式切换至第二操作模式。
[0020]
特别地,可以设置的是,控制单元基于数值对从第一操作模式切换至第二操作模式,该数值对包括用于操作压力波装置的频率和压力。例如,压力波装置构造成在下述情况时处于第一操作模式中:
[0021]-要求的频率小于6hz,并且
[0022]-要求的压力小于3巴并且要求的频率小于9hz,并且/或者
[0023]-要求的压力小于2巴并且要求的频率小于15hz,并且/或者
[0024]-要求的压力小于1巴并且要求的频率小于16hz。
[0025]
优选地,控制单元使用表将第一操作模式分配给该数值对。特别地,这种表存储在控制单元的存储器或存储单元中。还可以设想的是,该表,即该表的赋值可以由操作者更新或改变。因此,可以使该表适应第一压缩机和/或第二压缩机的当前规格,特别地在第一压缩机和/或第二压缩机在其使用寿命期间更换或改变其规格时可以使该表适应第一压缩机
和/或第二压缩机的当前规格。例如,控制单元包括控制回路,该控制回路不时地使该表适应第一压缩机和/或第二压缩机的当前规格。
[0026]
优选地,第一压缩机和/或第二压缩机构造成能够在不同的功率水平下操作,功率水平优选地被阶梯式地调节。换句话说,第一压缩机和/或第二压缩机,特别是其驱动第一压缩机和/或第二压缩机的发动机或马达不能连续调节。相反,第一压缩机和/或第二压缩机根据设定或限定的功率水平被阶梯式地调节。因此,结果表明,可以进一步降低压力波装置的整个系统的噪声水平。
[0027]
优选地,气动驱动元件包括压力调整单元,该压力调整单元位于第一压缩机和/或第二压缩机的下游,并且优选地,位于手持件的上游。尽管第一压缩机和/或第二压缩机基于第一压缩机和/或第二压缩机的离散功率水平提供了离散的初级加压气体水平,但是通过使用压力调整单元可以有利地将供应的气体的压力连续调节至可连续调节的次级加压气体水平。优选地,第一压缩机和第二压缩机使用共同的压力调整单元。例如,这种压力调整单元包括用于使初级气体压力调整至期望的次级气体压力的比例阀和/或磁阀,压力波装置使用该次级气体压力来使撞击在冲击本体上的抛射物加速。例如,压力调整单元包括减压器和/或排放阀,以提供比例阀。
[0028]
优选地,压力波装置构造成在第一操作模式中能够在仅第一压缩机向气动驱动元件供应气体的第一子模式与仅第二压缩机向气动驱动元件供应气体的第二子模式之间进行切换。因此,可以在操作期间或者不时地在第一压缩机与第二压缩机之间进行切换。因此,在气动驱动元件的寿命期间,第一压缩机和第二压缩机的负载减小。这对第一压缩机和第二压缩机的寿命有积极影响,并且因此对压力波装置的寿命有积极影响。
[0029]
优选地,第一压缩机和/或第二压缩机是无油摆动活塞式空气压缩机。结果表明,在第一压缩机和/或第二压缩机是无油摆动活塞式空气压缩机的情况下,使用构造成能够在第一操作模式与第二操作模式之间进行切换的压力波装置具有特别大的益处,特别是在关于由共振效应引起的所产生的噪声水平方面具有特别大的益处。
[0030]
本发明的另一方面是一种用于操作根据本发明的压力波装置的方法,该方法包括:
[0031]
在下述模式之间进行切换:
[0032]-第一操作模式,仅第一压缩机向气动驱动元件供应气体或者仅第二压缩机向气动驱动元件供应气体,以及
[0033]-第二操作模式,第一压缩机和第二压缩机向气动驱动元件供应气体。在压力波装置的上下文中讨论的所有益处和特征类似地适于用于操作根据本发明的压力波装置的方法,反之亦然。
[0034]
在尚未明确描述的任何地方,在不限制或扩大所描述的发明的范围的情况下,各个实施方式或它们的各个方面和特征可以彼此组合或交换,只要这样的组合或交换是有意义的并且在本发明的意义中。在适用的情况下,关于本发明的一个实施方式描述的优点也是本发明的其他实施方式的优点。
[0035]
在附图中:
[0036]
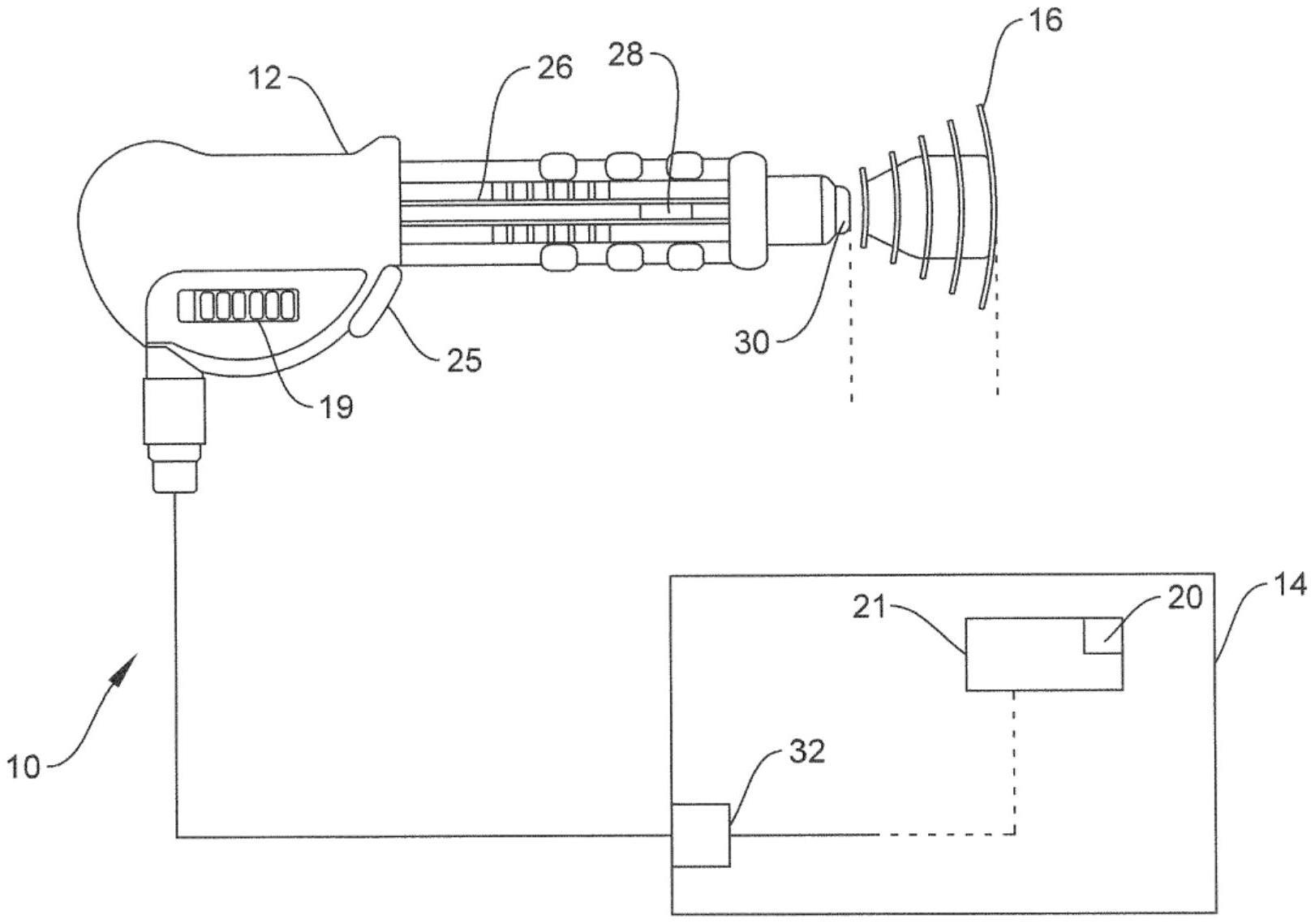
图1示出了压力波装置。
[0037]
图2和图3示出了根据本发明的示例性实施方式的电路图或压力装置。
[0038]
在图1中,示出了根据示例性实施方式的压力波装置10。这种压力波装置10旨在通过产生作用在身体的组织上的压力波16来治疗人体或动物的组织。特别地,可以设置的是,压力波装置10位于人体或动物体的皮肤上,并且压力波16通过皮肤进入人体或动物体并且作用在人体或动物体内的组织上。因此,压力波装置10包括冲击本体30,该冲击本体30在治疗期间与人或动物的皮肤接触。为了产生压力波16,压力波装置10包括抛射物28,该抛射物28在用于导引抛射物28的管件26中被加速。加速的抛射物28撞击在冲击本体30上,从而产生由压力波装置10发射的压力波16。特别地,压力波装置10具有:手持件12,该手持件12至少包括用于使抛射物28加速的管件26;以及气动驱动元件14,该气动驱动元件14提供用以使抛射物28在管件26内部加速的加压气体,抛射物28在该管件26中被加速。此外,可以设想的是,压力波装置10具有调整单元19和启用开关25。通过致动调整单元19,可以限定压力波装置10的操作参数,而启用开关25触发压力波16的产生。
[0039]
优选地,气动驱动元件14包括由压缩机发动机20驱动的第一压缩机21。特别地,可以设置的是,第一压缩机21构造成阶梯式地调节其功率水平,以建立分配给第一压缩机21的某一初级气体压力。通过使用压力调整单元32,可以有利地将由第一压缩机21通过其阶梯式的功率水平提供的初级气体压力调节至可以连续调节的次级气体压力。因此,可以连续调节压力波装置10的参数,尽管第一压缩机21、特别地压缩机发动机20是由离散的或可阶梯式调节的功率水平操作的。结果表明,通过使用第一压缩机21和压力调整单元32的这种组合可以优化由压力波装置10、特别地包括气动驱动元件14的压力波装置10产生的噪声水平。
[0040]
在图2和图3中,图示了根据本发明的第一实施方式和第二实施方式的压力波装置10的两个电路图。优选地,可以设置的是,气动驱动元件14包括用于提供初级气体压力的第一压缩机21和第二压缩机22两者。第一压缩机21和第二压缩机22构造成使得第一压缩机21和第二压缩机22可以设定成、特别地独立设定成离散功率水平。由第一压缩机21和第二压缩机22提供并且具有初级气体压力的加压气体穿过冷却装置42、超压阀44和具有排气阀48的冷却阱46,直到加压气体到达压力调整单元32为止,压力调整单元32优选地是比例阀,用以将加压气体从初级气体压力水平调节至期望的水平,即调节至次级气体压力水平。优选地,压力调整单元32的下游定位有压力传感器50,以便检测次级气体压力水平,该次级气体压力水平旨在用于使压力波装置10的抛射物28加速。特别地,压力传感器50可以是将压力调整单元32调节成适应期望的次级气体压力水平的控制回路的一部分。
[0041]
此外,电路图包括位于压力传感器50的下游的第一切换阈52和第二切换阈54。实际上,图2和图3中所图示的实施方式通过压力调整单元32的选择而彼此区分。在图2中示出的实施方式中,压力调整单元32构造为阀、特别地构造为磁阀,压力调整单元32优选地构造成承受高达7巴、优选地高达10巴的压力。根据图3的实施方式,压力调整单元32是减压器,该减压器用于承受高达7巴、优选地高达10巴的压力。
[0042]
特别地,根据本发明可以设置的是,气动驱动元件14使用第一压缩机21和第二压缩机22两者来提供加压气体、特别地具有初级气体压力水平的加压气体,该加压气体随后通过压力调整单元32进行调整。特别地,可以设置的是,压力波装置10构造成能够在下述两个模式之间进行切换:
[0043]-第一操作模式,仅第一压缩机21向气动驱动元件14供应气体或者仅第二压缩机
22向气动驱动元件14供应气体,以及
[0044]-第二操作模式,第一压缩机21和第二压缩机22向气动驱动元件14供应气体。
[0045]
换句话说,压力波装置10包括控制单元(未示出),该控制单元构造成用于将压力波装置10从第一操作模式切换至第二操作模式。因此,可以仅在需要大量要求的气体来供应气动驱动元件14的情况下将气动驱动元件14转换成第二操作模式。因此,由于供应气动驱动元件14所需的要求的气体的量较少,仅第一压缩机21或者仅第二压缩机22被操作,从而可以降低噪声水平。特别地,意图是压力波装置10构造成在例如通过调整单元19调节的要求的气体的量超过阈值时从第一操作模式切换至第二操作模式。例如,控制单元基于在手持件12处调节的参数来识别要求的气体的量。特别地,控制单元通过数值对限定或确定要求的气体的量,该数值对包括用于操作压力波装置10的频率和压力。换句话说,控制单元使用一种表,该表被分配给在压力波装置10的手持件12上设定的每对频率或压力。要求的气体的对应的量限定了压力波装置10是在第一操作模式下操作还是在第二操作模式下操作。
[0046]
例如,可以设想的是,在手持件12处设定的要求的频率小于6hz,并且/或者要求的压力小于3巴并且要求的频率小于9hz,并且/或者要求的频率小于2hz并且要求的频率小于15hz,并且/或者要求的频率小于1hz并且要求的频率小于10hz,以用于在第一操作模式下操作压力波装置。优选地,可以设置的是,第一压缩机21和第二压缩机22共享共同的压力调整单元32。
[0047]
此外,可以设想的是,压力波装置10、特别地控制单元构造成能够在第一操作模式下在仅第一压缩机21向气动驱动元件14供应气体的第一子模式与仅第二压缩机22向气动驱动元件14供应气体的第二子模式之间进行切换。因此,可以在第一压缩机21与第二压缩机22之间进行切换,以用于将工作载荷分配至压缩机21、22两者。
[0048]
图4示出了用于设定第一压缩机21和第二压缩机22、特别是用于在第一操作模式与第二操作模式之间切换的表的示例。如所图示的,该表由两个参数、频率和压力形成,并且限定了分配给第一操作模式下的操作和第二操作模式下的操作的数值对。特别地,分配到数字4和数字5的这些数值对需要第二操作模式下的操作。
[0049]
附图标记:
[0050]
10压力波装置
[0051]
12手持件
[0052]
14气动驱动元件
[0053]
16压力波
[0054]
19调整单元
[0055]
20压缩机发动机
[0056]
21第一压缩机
[0057]
22第二压缩机
[0058]
25启用开关
[0059]
26管件
[0060]
28抛射物
[0061]
30冲击本体
[0062]
32压力调整单元
[0063]
42冷却装置
[0064]
44超压阀
[0065]
46冷却阱
[0066]
48排放阀
[0067]
50压力传感器
[0068]
52第一切换阈
[0069]
54第二切换阈
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1