内窥镜处置器具、内窥镜装置及处置方法与流程
本发明涉及一种内窥镜处置器具、内窥镜装置及处置方法。
背景技术:
1、以往,组合内窥镜装置和内窥镜处置器具来对活体实施各种处置。作为处置的一例,已知有内窥粘膜下剥离术(endoscopic·submucosal·dissection:esd)。适用esd的例如食道、胃、大肠等的内壁由粘膜层、粘膜下层及肌层这3层构成,esd中,粘膜层的病变部位包括粘膜下层在内而被剥离,例如如超过2cm的比较大的病变部位也能够一并切除。
2、作为内窥镜处置器具的一例,例如在专利文献1中公开有一种如下内窥镜处置器具,其具备:插入部分,能够插入到体内;操作部;及一根操作线,从操作部延伸至插入部分,通过操作部的操作被牵引向操作部侧,插入部分包含:前端部,具有可开闭的把持部;弯曲部,与前端部的操作部侧相邻设置且能够弯曲;及连接部,连接弯曲部和操作部。在该内窥镜处置器具中,连接部通过操作部的操作,沿着连接部的纵轴进退或以连接部的纵轴为中心而旋转,通过连接部进退或旋转,把持部进退或旋转,通过操作线被牵引,把持部关闭,且在把持部关闭的状态下弯曲部弯曲。
3、以往技术文献
4、专利文献
5、专利文献1:国际公开第2019/172318号
技术实现思路
1、发明要解决的技术课题
2、在专利文献1所公开的内窥镜处置器具中,弯曲部通过牵引操作部的操作线且能够摆动的操作手柄而弯曲。此时,被牵引的操作线通过所弯曲的弯曲部想要恢复到弯曲前的状态的弹性力或通过把持部提拉的病变部位的弹性力,向恢复到牵引前的状态的反牵引方向被拉拽。因此,在操作手柄的摆动支撑轴的部分或保持操作线的滑块的滑动部分等相对移动的部位设置有例如由橡胶等构成的摩擦部件,保持操作手柄的操作状态。并且,专利文献1中还记载有利用弹簧等施力部件,对操作手柄向牵引方向施力的结构。
3、但是,操作线的反牵引方向的恢复力随着牵引量的增大而增大,但基于摩擦部件或施力部件的保持力是恒定的。因此,例如,若将保持力设定为与恢复力的最大值一致,则操作手柄的操作变重,若保持力小则无法保持动作手柄的操作状态等,难以调节操作部。
4、本发明是鉴于上述情况而完成的,提出一种使前端部进行动作的操作部的操作性优异的内窥镜处置器具、内窥镜装置及处置方法。
5、用于解决技术课题的手段
6、本发明的内窥镜处置器具,其具备:前端部,设置有可开闭的把持部;弯曲部,与上述前端部相邻设置且能够弯曲;操作部,被输入关闭上述把持部的操作及使上述弯曲部弯曲的操作;及操作线,将上述操作部的操作传递至上述把持部及上述弯曲部,上述操作部包含:操作部主体,可移动地保持连接有上述操作线的线材保持部;及操作手柄,移动上述线材保持部,上述内窥镜处置器具具备摩擦调整机构,该摩擦调整机构根据与上述操作手柄的操作联动的上述线材保持部对上述操作线的牵引量的增大,使卡止上述线材保持部的摩擦力增大。
7、本发明的内窥镜装置,其具备:作为上述内窥镜处置器具的第1处置器具;第2处置器具;及内窥镜,具有上述第1处置器具能够插入贯通的第1处置器具通道及上述第2处置器具能够插入贯通的第2处置器具通道。
8、本发明的处置方法,其中,利用上述内窥镜装置,通过上述内窥镜的上述第1处置器具通道,将上述第1处置器具的上述前端部配置于体内的病变部位,通过上述第1处置器具的上述把持部把持上述病变部位,在把持住上述病变部位的状态下,使上述第1处置器具的上述弯曲部弯曲,由此抬起上述病变部位,在抬起上述病变部位的状态下,通过插入贯通于上述内窥镜的上述第2处置器具通道的上述第2处置器具对上述病变部位的下方部位进行处置。
9、发明效果
10、根据本发明,能够提供一种使前端部进行动作的操作部的操作性优异的内窥镜处置器具、内窥镜装置及处置方法。
技术特征:
1.一种内窥镜处置器具,其具备:
2.根据权利要求1所述的内窥镜处置器具,其中,
3.根据权利要求1或2所述的内窥镜处置器具,其中,
4.根据权利要求1至3中任一项所述的内窥镜处置器具,其中,
5.根据权利要求4所述的内窥镜处置器具,其中,
6.根据权利要求5所述的内窥镜处置器具,其中,
7.根据权利要求1至3中任一项所述的内窥镜处置器具,其中,
8.根据权利要求7所述的内窥镜处置器具,其中,
9.根据权利要求8所述的内窥镜处置器具,其中,
10.根据权利要求8或9所述的内窥镜处置器具,其中,
11.根据权利要求10所述的内窥镜处置器具,其中,
12.根据权利要求1至11中任一项所述的内窥镜处置器具,其中,
13.根据权利要求12所述的内窥镜处置器具,其中,
14.根据权利要求13所述的内窥镜处置器具,其中,
15.根据权利要求13或14所述的内窥镜处置器具,其中,
16.一种内窥镜装置,其具备:
17.一种处置方法,其中,
技术总结
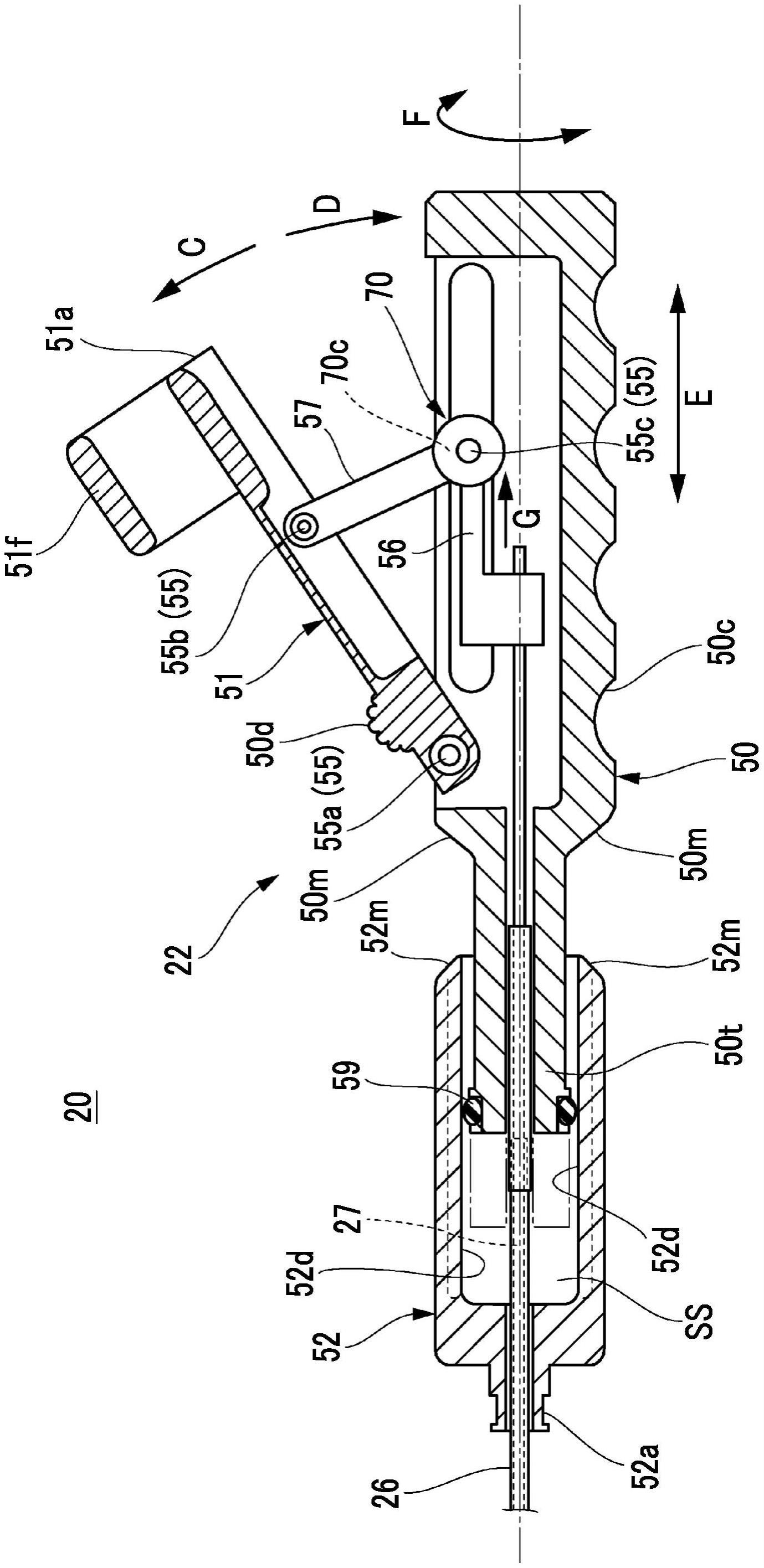
本发明提供一种使前端部进行动作的操作部的操作性优异的内窥镜处置器具、内窥镜装置及处置方法。一种内窥镜处置器具(20),其具备:前端部(23),设置有可开闭的把持部(24);弯曲部(25),与前端部相邻设置且能够弯曲;操作部(22),被输入关闭把持部的操作及使弯曲部弯曲的操作;及操作线(27),将操作部的操作传递至把持部及弯曲部,操作部包含:操作部主体(50),可移动地保持连接有操作线的线材保持部(56);及操作手柄(51),移动线材保持部,所述内窥镜处置器具(20)具备摩擦调整机构(70),所述摩擦调整机构对应于与操作手柄的操作联动的线材保持部对操作线的牵引量的增大,使卡止线材保持部的摩擦力增大。
技术研发人员:上田佳弘
受保护的技术使用者:富士胶片株式会社
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!