具有旋转锁的外科器械的制作方法
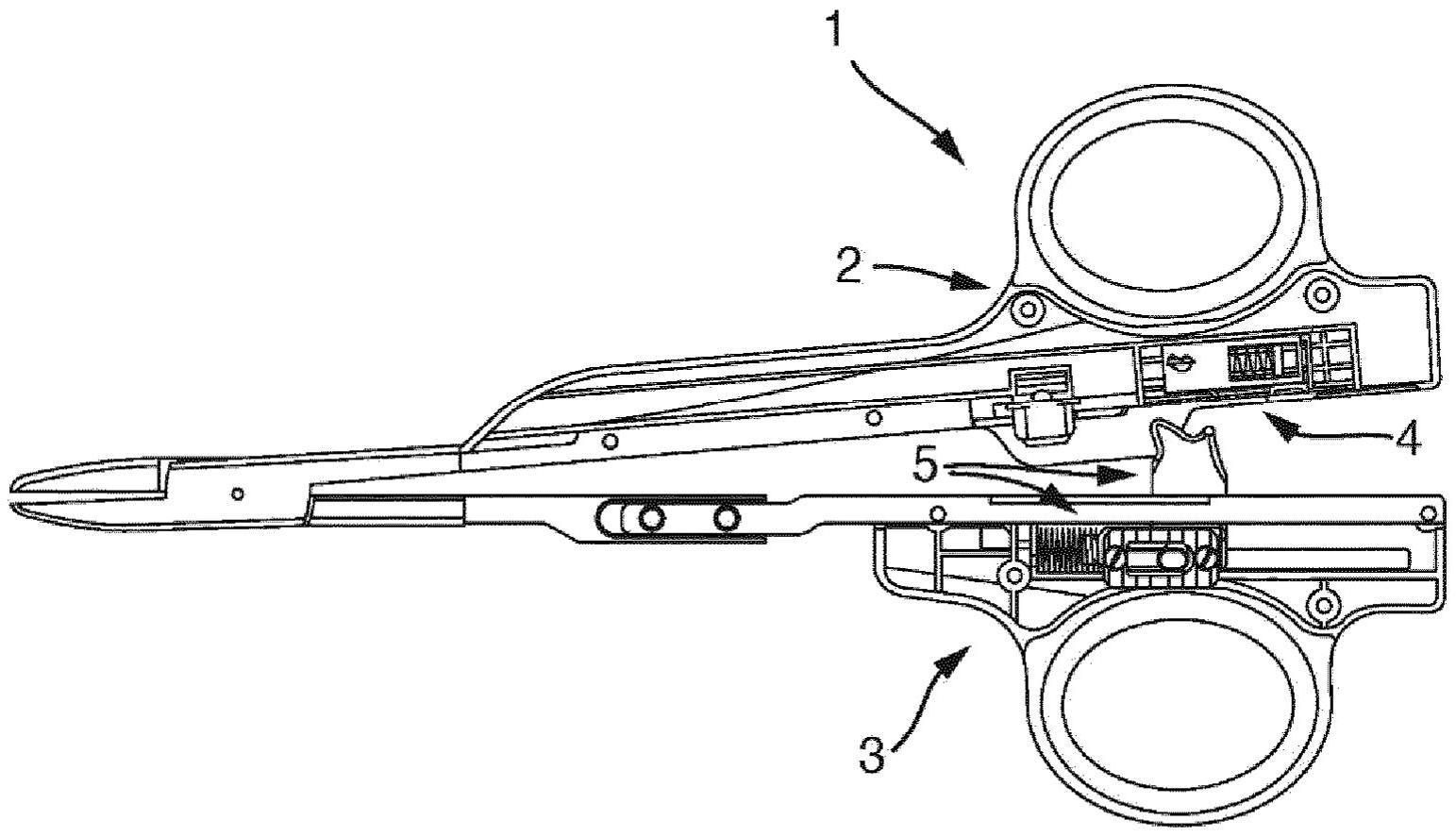
本发明涉及一种外科器械,所述外科器械具有两条可相对于彼此运动的抓取臂并且具有旋转锁,所述旋转锁被设置用于将两条抓取臂相对于彼此可松开地锁定,其中所述旋转锁在其中一条抓取臂的区域中具有母锁定装置并且在另一条抓取臂的区域中具有公锁定装置,其中所述母锁定装置具有用于锁定并且释放公锁定装置的锁定区段的机械的控制机构。
背景技术:
1、这样的外科器械由de 102016118199a1已知。所述已知的外科器械被制作为夹紧器械,其中两条抓取臂在远端延续成夹紧钳,所述夹紧钳通过抓取臂相对于彼此的相对运动为夹紧而聚拢或彼此分开。所述已知的夹紧器械具有旋转锁,该旋转锁将所述抓取臂可松开地相对于彼此锁定,从而能够维持所述夹紧钳的夹紧状态。所述旋转锁具有处于其中一条抓取臂上的公锁定装置和处于在抓取臂的枢转平面中对置的抓取臂上的母锁定装置。所述公锁定装置设有朝对置的抓取臂伸出的锁定区段,该锁定区段以沿着抓取臂可平移移动的方式得到支承。所述被设置在对置的抓取臂上的母锁定装置被设置用于形状配合地卡锁地接纳公锁定装置的锁定区段并且具有以沿着所属的抓取臂可线性运动的方式得到支承的控制滑槽,该控制滑槽按照圆珠笔原理的方式根据两条抓取臂的相应的相对运动来接纳、固定并且又释放对置的公锁定装置的锁定区段。在所述抓取臂的相对于彼此的闭合运动中,所述锁定区段沉入到可在弹簧加载的情况下运动的控制滑槽中。被施加到所述两条抓取臂上的手动的闭合运动的随后的卸荷引起所述锁定区段的、在母锁定装置的控制滑槽内部的卡锁。通过手动的加荷将所述抓取臂重新压到一起,这引起所述锁定区段从母锁定装置的控制滑槽中的释放。
技术实现思路
1、本发明的目的是,提供一种开头所提到的类型的外科器械,该外科器械能够实现特别可靠地且安全地相对于彼此锁定并且释放两条抓取臂。
2、该目的通过以下方式来实现,即:给所述公锁定装置分配了机械的控制机构,该机械的控制机构被设置用于使所述公锁定装置的锁定区段从限定了静止位置的终端位置移位到限定了功能位置的终端位置中并且反之从限定了功能位置的终端位置移位到限定了静止位置的终端位置中,并且所述控制装置具有固定器件,所述固定器件被设置用于将锁定区段固定在两个终端位置中。所述按本发明的解决方案确保,所述锁定区段总是处于限定的终端位置中。通过本发明避免了未限定的中间位置,这些中间位置在现有技术中可能导致不能实现所述旋转锁的可靠的锁定。所述机械的控制装置能够具有弹簧装置,以便将公锁定装置的锁定区段转换到终端位置中。所述弹簧装置也能够用作固定器件,以便将锁定区段固定在终端位置中。所述固定器件优选以机械方式来制作。作为替代方案,所述固定器件也能够以电磁的或永磁的方式起作用。所述锁定区段能够在其终端位置之间平移地或旋转地移位。所述按本发明的解决方案特别有利地适用于开放式外科器械。优选所述外科器械具有夹紧钳,所述夹紧钳能够借助于抓取臂来运动。能够向所述夹紧钳加载电流。所述机械的控制装置能够通过电驱动装置得到支持,以便实现所述旋转锁的激活或解除激活。
3、在本发明的一种设计方案中,设置了可手动操作的操纵装置,所述操纵装置与至少一个固定器件进行作用连接,以便操控至少一个固定器件,从而释放锁定区段的可移位性。由此能够在需要时通过相应的使用者手动地激活所述机械的控制装置。在没有手动激活的情况下,所述公锁定区段保持在限定的终端位置中,从而根据所述公锁定区段是处于限定了功能位置(锁定位置)的终端位置中还是位于限定了静止位置的终端位置中而要么能够用所述母锁定装置来锁定、要么排除与所述母锁定装置的相互作用。
4、在本发明的另一种设计方案中,所述锁定区段为了在两个终端位置之间的移位而沿着线性导引部平移地得到导引。所述线性导引部优选沿着抓取臂的纵向方向沿着该抓取臂的面向对置的抓取臂的边缘区域来延伸。所述线性导引部优选直线地制作而成,但是作为替代方案也能够在抓取臂的区域中沿着曲线轨迹来延伸。所述线性导引部能够一体地被集成在抓取臂中或者被设置在单独制造的承载件中,该承载件在运行状态中与抓取臂固定地连接。
5、在本发明的另一种设计方案中,所述线性导引部沿着曲线轨迹、尤其是沿着圆弧来伸展。所述曲线轨迹、尤其是圆弧在抓取臂的枢转平面中延伸。所述线性导引部优选如此制作而成,使得所述锁定区段在其限定了静止位置的终端位置中被定位在抓取臂的相应的外轮廓之内,使得所述锁定区段在这个静止位置中不向外伸出超过抓取臂。由此可靠地避免尤其操作人员的手套在操作外科器械时在所述锁定区段上挂住。
6、在本发明的另一种设计方案中,至少一个固定器件被制作为传力配合地起作用的固定单元。所述传力配合地起作用的固定单元优选具有彼此互补的、一方面位置固定地处于抓取臂的区域中并且另一方面可运动地处于锁定区段上的摩擦区段,所述摩擦区段尤其一方面呈粒结状的成型部的形式并且另一方面呈加深的成型部的形式。以有利的方式,所述传力配合地起作用的固定单元以通过力来限制地可松开的方式来构成。因此,所述固定单元在通过力来限制的情况下起作用。一旦被施加到所述锁定区段上的移位力大于所述固定单元在相应的终端位置中的保持力,则所述锁定区段为了转换到相应另一终端位置中而被释放。所述传力配合地起作用的固定单元也能够具有永磁体或电磁体。
7、在本发明的另一种设计方案中,至少一个固定器件被制作为形状配合地起作用的固定单元。所述形状配合地起作用的固定单元具有松开机构,该松开机构在需要时释放锁定区段。
8、在本发明的另一种设计方案中,为所述形状配合地起作用的固定单元分配了可手动操作的操纵装置,以便将所述固定单元从固定位置转换到释放位置中。所述可手动操作的操纵装置能够具有在前面所描述的设计方案的意义上的松开机构。所述可手动操作的操纵装置优选具有至少一个操作元件,所述操作元件在人体工程学上有利地被定位在抓取臂之一的区域中。作为补充方案或替代方案,它以对污染不敏感的方式制作而成。优选所述可手动操作的操纵装置如此制作而成,使得其能够像用右手的人一样由用左手的人同样无问题地并且在人体工程学上有利地来操作。
9、在本发明的另一种设计方案中,所述形状配合地起作用的固定单元相对于该固定单元的移位平面镜像对称地构成,其中所述固定单元尤其在抓取臂的对置侧上分别具有可弹性运动的卡锁元件,所述卡锁元件与抓取臂的区域中的位置固定的卡锁留空部共同作用。所述固定单元相对于抓取臂的枢转平面优选镜像对称地构成。两个弹性可运动的卡锁元件的镜像对称的布置方案能够实现将所述可平移运动的锁定区段特别可靠地固定在相应的终端位置中。所述卡锁元件优选与可手动操作的操纵装置处于作用连接之中。
10、在本发明的另一种设计方案中,所述锁定区段借助于旋转支承件旋转地得到导引。所述旋转支承件优选具有旋转轴线,该旋转轴线沿着抓取臂的纵向方向延伸并且因此至少在很大程度上平行于抓取臂的与对置的抓取臂相邻的边缘区域来延伸。对于所述锁定区段的旋转的导引允许在从抓取臂上突出的情况下将该锁定区段定位在功能位置中并且将该锁定区段停放在所属的抓取臂的外轮廓之内的静止位置中。
11、在本发明的另一种设计方案中,所述抓取臂具有至少一个留空部,在静止位置中所述锁定区段被接纳在所述留空部中。优选所述锁定区段被齐平地接纳在留空部中。所述至少一个留空部能够被制作为在一侧至少区段式地封闭的、尤其呈袋状物或类似的不连续的凹陷部的形式的凹陷部或者也能够被制作为朝抓取臂的两侧敞开的穿孔。因此,根据所述至少一个留空部的设计方案,所述锁定区段能够旋转小于360°或360°以及更大的角度。所述锁定区段能够被扭转到静止位置中,在所述静止位置中所述锁定区段不突出超过所属的的抓取臂,由此可靠地防止尤其操作人员的手套无意地在所述锁定区段上挂住。
12、在本发明的另一种设计方案中,所述抓取臂具有与锁定区段的外部尺寸相协调的穿孔,所述穿孔如此构成,使得所述锁定区段能够沿着相反的旋转方向旋转穿过该通孔。由此,所述锁定区段能够不仅沿着一个旋转方向、而且沿着两个旋转方向从静止位置被转换到功能位置中或相反地被转换。这种设计方案在人体工程学方面是有利的,因为不仅对于用左手的人来说而且对于用右手的人来说都能实现简单的操作,以便将所述锁定区段扭转。
13、在本发明的另一种设计方案中,为所述锁定区段分配了机械的强制控制机构,其强制地将所述锁定区段从中间位置转换到终端位置中。所述机械的强制控制机构在旋转地导引锁定区段时允许所述锁定区段在相应地激活强制控制机构的情况下自动地从中间位置被调节到相应的终端位置中,而这一点没有通过手动操纵来进行。这种设计方案对操作人员来说简化了将锁定区段转换到相应的静止位置或者相应的功能位置中的过程。由此可靠地避免功能故障或不明确的中间位置。此外,朝相应的终端位置中的几乎自动的转换降低了相应的操作人员的操纵耗费,由此简化了对于所述外科器械的操作。
14、在本发明的另一种设计方案中,所述强制控制机构在机械的作用连接之中如此被插入到锁定区段与可手动运动的操纵元件之间,使得所述操纵元件的开始的运动引起所述强制控制机构的激活。这种设计方案需要可手动运动的操纵元件,该操纵元件在一开始将运动引入到强制控制机构中,该强制控制机构而后被激活并且引起所述锁定区段朝相应的终端位置中的所期望的移位。所述可手动运动的操纵元件优选是在抓取臂的区域中旋转地得到支承的操纵元件、特别是旋转轮,该旋转轮在其外圆周的区域中设有尤其呈槽纹的形式的抓握面,以便简化该旋转轮的操作。所述操纵元件是之前所描述的操纵装置的一部分。
15、在本发明的另一种设计方案中,所述强制控制机构具有延迟单元,该延迟单元引起从操纵元件到锁定区段上的运动延迟的转矩传递。由此实现了受限的自由运转,所述自由运转优选处于5°与85°之间的旋转角度范围内。在这个旋转角度范围内,对于所述操纵元件的操纵还没有引起强制控制机构的激活并且尤其也没有引起锁定区段从其中一个终端位置到另一个终端位置中的转换。对锁定区段的延迟的反作用能够实现所述锁定区段的固定,以防止由于出现的横向力而意外地旋转。因此,作用到所述锁定区段上的横向力对所述锁定区段的相应的终端位置没有不好的影响。此外,这种设计方案是有利的,因为所述操纵元件的意外的较小的旋转运动对所述旋转锁的锁止或释放状态没有影响。
16、在本发明的另一种设计方案中,所述强制控制机构具有多个相对于彼此可同轴地旋转运动的功能组件,所述功能组件设有沿着旋转方向起作用的控制轮廓,所述控制轮廓为了将锁定区段强制地转换到终端位置中而彼此共同作用。因此,所述强制控制机构旋转地起作用,其中不同的功能组件优选沿着旋转轴线的纵向方向至少部分地相互重叠,由此产生所述强制控制机构的功能组件的节省位置空间的布置。所述控制轮廓优选被设置在相应的功能组件的内周和/或外周上,以便以所期望的方式沿着周向方向彼此共同作用。
17、在本发明的另一种设计方案中,所述强制控制机构具有至少一个将激活力施加到强制控制机构的功能组件上的弹簧装置。所述弹簧装置有利地具有持久的预紧力。所述弹簧装置作为弹簧驱动装置起作用,以便自动地、也就是说在没有手动辅助动作的情况下完成被引入到相应的功能组件上的旋转运动。所述弹簧装置能够被制作为恒力弹簧或被制作为累进地起作用的弹簧装置,其具有优选来自0.1n/mm与10n/mm之间的范围的弹簧刚度。
- 还没有人留言评论。精彩留言会获得点赞!