手术机器人粒子植入机构、机械手末端设备及手术机器人的制作方法
本发明涉及手术器械领域,特别是涉及一种手术机器人粒子植入机构、机械手末端设备及手术机器人。
背景技术:
1、现有的穿刺针植入手术中,用于治疗病灶的放射性粒子链通常植入量不能根据个案的病情有针对性地调整并输入放射性粒子链,从而使得手术过程中的放射性粒子的植入量无法根据每个病患的实际情况而得到精准的控制。
技术实现思路
1、基于此,有必要针对上述的问题,提供一种改进的手术机器人粒子植入机构、机械手末端设备及手术机器人。该手术机器人粒子植入机构通过将植入组件可选择性地形成待植入的放射性粒子链,使得待植入的放射性粒子链能够依据个案调整并输入,从而使得手术过程中的放射性粒子链能够得到精准地控制。
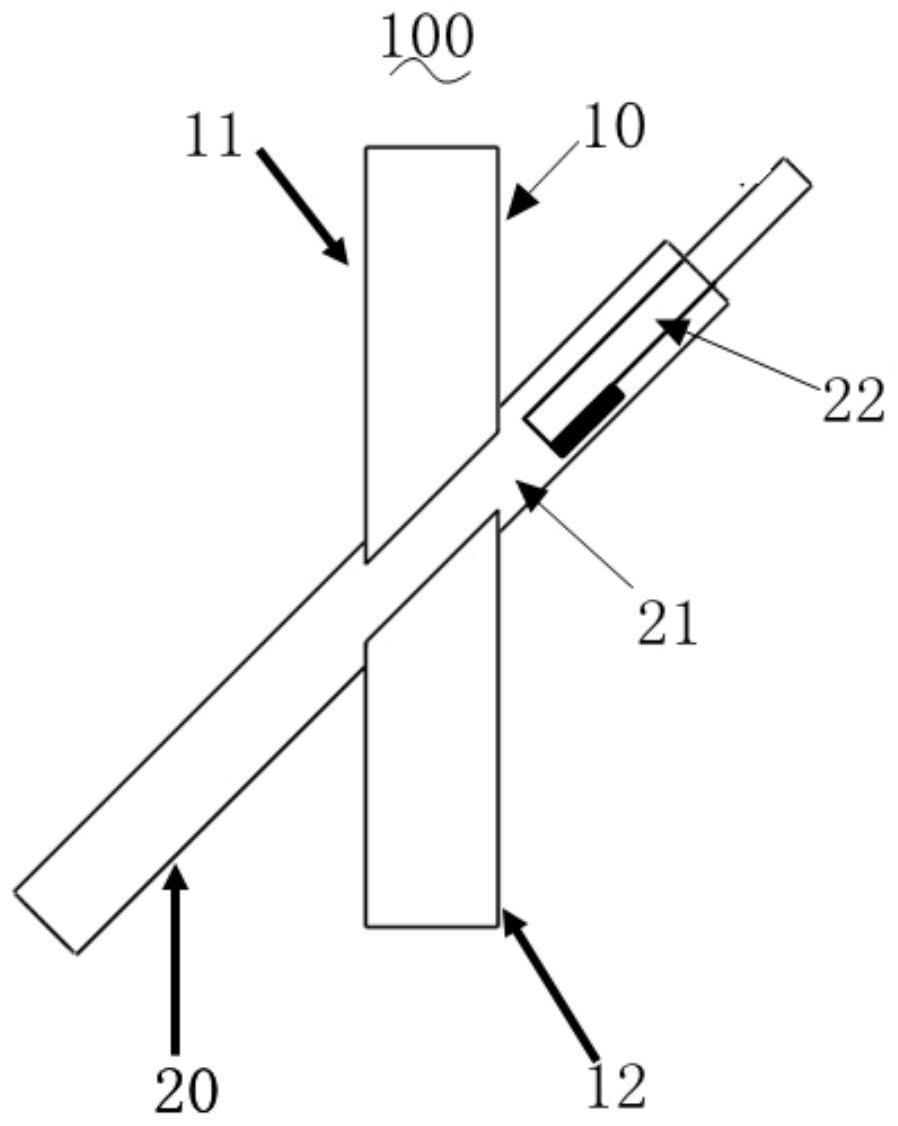
2、一种手术机器人粒子植入机构,所述粒子植入机构包括存储单元以及植入组件,所述存储单元用于存放形成放射性粒子链的物料,所述物料包括放射性粒子以及可降解填充物;
3、至少部分所述植入组件穿设于所述存储单元内,并能够选择性地使位于所述存储单元内的不同物料有序地形成所述放射性粒子链。
4、进一步地,所述存储单元包括第一物料夹及第二物料夹,所述第一物料夹存放多个放射性粒子,所述第二物料夹存放多个可降解填充物;
5、所述植入组件能够选择性地连接于所述第一物料夹或所述第二物料夹。
6、进一步地,至少部分所述植入组件转动地连接于所述存储单元,以连接于所述第一物料夹或所述第二物料夹;及/或,
7、所述植入组件包括植入套管及推杆,所述植入套管转动连接于所述存储单元,所述推杆的一端伸入所述植入套管内,并随所述植入套管的转动下与所述存储单元之间能够形成多个不同夹角,以对应于所述第一物料夹或所述第二物料夹的不同区域。
8、本发明还提供一种机械手末端设备,所述机械手末端设备包括切换架及切换架驱动机构,
9、所述切换架驱动机构包括传送组件,所述传送组件用于驱动所述穿刺针组件运动至穿刺针接口。
10、进一步地,所述切换架开设有安装槽,所述安装槽内装设有多个穿刺针组件,所述穿刺针组件在所述传送组件的驱动下通过平移或旋转的方式运动至所述穿刺针接口。
11、进一步地,所述安装槽的截面为环形、螺旋线或“几”字形,所述安装槽内均匀地布设多个所述穿刺针组件。
12、进一步地,所述机械手末端设备包括穿刺针驱动装置,
13、所述穿刺针驱动装置包括手术机器人粒子植入机构及套针驱动机构,所述套针驱动机构能够驱动所述穿刺针组件执行穿刺动作。
14、进一步地,所述粒子植入机构为如上述任意一项所述的手术机器人粒子植入机构。
15、进一步地,所述穿刺针组件包括外针及内针;所述外针套设于所述内针外;
16、所述穿刺针组件还包括外针驱动单元及内针驱动单元,所述外针驱动单元连接并驱动所述外针及所述内针进行穿刺;
17、所述内针驱动单元连接并驱动所述内针释放放射性粒子链。
18、本发明还提供一种机械手末端设备,所述机械手末端设备包括切换架及切换架驱动机构,所述切换架开设有安装槽及与所述安装槽相连通的穿刺针接口,所述安装槽用于安装至少两组穿刺针组件,所述切换架驱动机构用于切换各个所述穿刺针组件至穿刺针接口,所述切换架驱动机构切换各个所述穿刺针组件的路径为螺旋线。
19、进一步地,所述切换架具有截面为螺旋线的安装面,所述安装槽设置在所述安装面上。
20、进一步地,所述安装面包括第一安装面和第二安装面,所述第一安装面和所述第二安装面分别位于所述切换架的内侧和外侧。
21、进一步地,所述螺旋线的安装面的开口位置对应所述穿刺针接口的位置;或,
22、所述螺旋线的中心位置对应所述穿刺针接口的位置。
23、本发明提供还一种手术机器人,包括如上述任一项所述的手术机器人粒子植入机构或包括如上述任一项所述的机械手末端设备。
技术特征:
1.一种手术机器人粒子植入机构,其特征在于,所述粒子植入机构包括存储单元以及植入组件,所述存储单元用于存放形成放射性粒子链的物料,所述物料包括放射性粒子以及可降解填充物;
2.根据权利要求1所述的手术机器人粒子植入机构,其特征在于,所述存储单元包括第一物料夹及第二物料夹,所述第一物料夹存放多个放射性粒子,所述第二物料夹存放多个可降解填充物;
3.根据权利要求2所述的手术机器人粒子植入机构,其特征在于,至少部分所述植入组件转动地连接于所述存储单元,以连接于所述第一物料夹或所述第二物料夹;及/或,
4.一种机械手末端设备,其特征在于,所述机械手末端设备包括切换架及切换架驱动机构,
5.根据权利要求4所述的机械手末端设备,其特征在于,所述切换架开设有安装槽,所述安装槽内装设有多个穿刺针组件,所述穿刺针组件在所述传送组件的驱动下通过平移或旋转的方式运动至所述穿刺针接口。
6.根据权利要求5所述的机械手末端设备,其特征在于,所述安装槽的截面为环形、螺旋线或“几”字形,所述安装槽内均匀地布设多个所述穿刺针组件。
7.根据权利要求5所述的机械手末端设备,其特征在于,所述机械手末端设备包括穿刺针驱动装置,
8.根据权利要求7所述的机械手末端设备,其特征在于,所述粒子植入机构为如权利要求1-3任意一项所述的手术机器人粒子植入机构。
9.根据权利要求7所述的机械手末端设备,其特征在于,所述穿刺针组件包括外针及内针;所述外针套设于所述内针外;
10.一种机械手末端设备,其特征在于,所述机械手末端设备包括切换架及切换架驱动机构,所述切换架开设有安装槽及与所述安装槽相连通的穿刺针接口,所述安装槽用于安装至少两组穿刺针组件,所述切换架驱动机构用于切换各个所述穿刺针组件至穿刺针接口,所述切换架驱动机构切换各个所述穿刺针组件的路径为螺旋线。
11.根据权利要求10所述的机械手末端设备,其特征在于,所述切换架具有截面为螺旋线的安装面,所述安装槽设置在所述安装面上。
12.根据权利要求11所述的机械手末端设备,其特征在于,所述安装面包括第一安装面和第二安装面,所述第一安装面和所述第二安装面分别位于所述切换架的内侧和外侧。
13.根据权利要求11所述的机械手末端设备,其特征在于,所述螺旋线的安装面的开口位置对应所述穿刺针接口的位置;或,
14.一种手术机器人,其特征在于,包括如权利要求1-3任一项所述的手术机器人粒子植入机构或包括如权利要求4-13任一项所述的机械手末端设备。
技术总结
本发明涉及一种手术机器人粒子植入机构、机械手末端设备及手术机器人。所述粒子植入机构用于向套针驱动机构植入放射性粒子链,所述粒子植入机构包括存储单元以及植入组件,所述存储单元用于存放形成放射性粒子链的物料,所述物料包括放射性粒子以及可降解填充物;至少部分所述植入组件;穿设于所述存储单元内,并能够选择性地使位于所述存储单元内的不同物料有序地形成所述放射性粒子链,并植入套针驱动机构内。
技术研发人员:赵卓,王畅,孙洪雨
受保护的技术使用者:武汉联影智融医疗科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!