一种能够在CT和MRI影像里面被识别位姿的配准工具的制作方法
一种能够在ct和mri影像里面被识别位姿的配准工具
技术领域
1.本发明属于医用设备技术领域,尤其涉及一种能够在ct和mri影像里面被识别位姿的配准工具。
背景技术:
2.ct(computed tomography),即电子计算机断层扫描,它是利用精确准直的x线束、γ射线、超声波等,与灵敏度极高的探测器一同围绕人体的某一部位作一个接一个的断面扫描,具有扫描时间快,图像清晰等特点,可用于多种疾病的检查,mri也就是磁共振成像,英文全称是:magnetic resonance imaging。经常为人们所利用的原子核有:1h、11b、13c、17o、19f、31p。在这项技术诞生之初曾被称为核磁共振成像,到了20世纪80年代初,作为医学新技术的nmr成像。
3.在实现本发明过程中,发明人发现该技术中至少存在如下问题:由于ct和mri影像属于透视技术,在透视图像中,前后的前轮廓相互叠加也没有阴影,难以肉眼分辨位置关系,其角度分析难度更大,从而造成ct和mri影像里手术中不方便了识别角度的问题。
4.为此,我们提出来一种能够在ct和mri影像里面被识别位姿的配准工具解决上述问题。
技术实现要素:
5.本发明的目的是为了解决现有技术中,ct和mri影像里手术中不方便了识别角度的问题,而提出的一种能够在ct和mri影像里面被识别位姿的配准工具。
6.为了实现上述目的,本发明采用了如下技术方案:一种能够在ct和mri影像里面被识别位姿的配准工具,包括目标杆形手术工具,所述目标杆形手术工具的外端套有第一弹力皮套和第二弹力皮套,所述第一弹力皮套和第二弹力皮套之间固定夹有识别壳架,所述识别壳架呈三棱锥形,且识别壳架四个角的外形不同。
7.优选的,所述第一弹力皮套和第二弹力皮套的外壁套有弹力架,所述弹力架的内壁呈正反锥形,且弹力架的内壁与第一弹力皮套和第二弹力皮套的外壁活相互挤压。
8.优选的,所述识别壳架包括大球块、壳体、小球块和正方块,所述壳体由三个三角形组成,所述大球块的下端固定连接在壳体的一角,所述正方块固定连接在壳体的另一角,所述小球块与壳体的三面交汇点固定,所述第一弹力皮套和第二弹力皮套固定安装在壳体的下部内端。
9.优选的,所述识别壳架还包括磁感应块,所述磁感应块固定连接在壳体的背向小球块的边角处。
10.优选的,所述第一弹力皮套包括第一套体,所述第一套体的下端卡接固定在壳体的下部内端,所述目标杆形手术工具贯穿第一套体。
11.优选的,所述第一弹力皮套还包括第一弹力挤压块,所述第一弹力挤压块均匀布置在第一套体的内端,所述第一弹力挤压块和第一套体为一体结构。
12.优选的,所述第二弹力皮套包括第二套体,所述第二套体的上部卡接固定在壳体的下部内端,所述第二套体的上端与第一套体的下端固定连接为一体。
13.优选的,所述第二弹力皮套还包括第二弹力挤压块,所述第二弹力挤压块均匀布置在第二套体的内壁,所述第二弹力挤压块和第二套体为一体结构。
14.优选的,所述弹力架包括第一挤压环、拉力弹簧和第二挤压环,所述拉力弹簧滑动贯穿壳体,所述拉力弹簧的上端固定连接在第一挤压环的下端,所述拉力弹簧的下端固定连接在第二挤压环的上端,所述第一挤压环和第二挤压环的内侧设置有锥形挤压面。
15.优选的,所述拉力弹簧设置有三个,所述拉力弹簧的上端固定连接有第一加固块,所述第一加固块与第一挤压环固定连接,所述拉力弹簧的下端固定连接有第二加固块,所述第二加固块与第二挤压环固定连接。
16.综上所述,本发明的技术效果和优点:1、当识别壳架处于ct和mri影像里时,利用大球块和小球块作为z坐标识别,利用小球块和正方块作为y坐标识别,剩余一角与小球块作为x坐标识别,方便了肉眼通过二维平面直接形像判断目标杆形手术工具的角度,降低了目标杆形手术工具的肉眼直观识别难度。
17.2、采用分析图像大球块和小球块,通过大小分辨大球块和小球块,通过形状非圆的一端且存在识别块的一端判断为正方块,然后同理得出x、y和z轴,通过x、y和z轴的缩短幅度计算识别壳架的三维角度,从而降低了图像识别技术难度。
附图说明
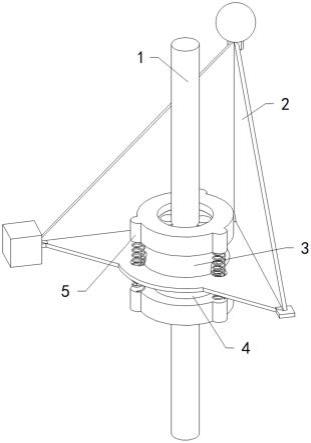
18.图1为本发明的整体结构示意图;
19.图2为本发明的识别壳架结构示意图;
20.图3为本发明的第一弹力皮套结构示意图;
21.图4为本发明的第二弹力皮套结构示意图;
22.图5为本发明的弹力架结构示意图。
23.图中:1、目标杆形手术工具;2、识别壳架;3、第一弹力皮套;4、第二弹力皮套;5、弹力架;21、大球块;22、壳体;23、小球块;24、磁感应块;25、正方块;31、第一弹力挤压块;32、第一套体;41、第二弹力挤压块;42、第二套体;51、第一挤压环;52、拉力弹簧;53、第二挤压环。
具体实施方式
24.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
25.请参阅图1,一种能够在ct和mri影像里面被识别位姿的配准工具,包括目标杆形手术工具1,目标杆形手术工具1的外端套有第一弹力皮套3和第二弹力皮套4,第一弹力皮套3和第二弹力皮套4之间固定夹有识别壳架2,识别壳架2呈三棱锥形,且识别壳架2四个角的外形不同。采用识别壳架2四个角的外形不同,方便了肉眼或电脑判断识别壳架2的角度,从而方便了用于肉眼直接判断或电脑识别进行方位计算配准。
26.请参阅图1,第一弹力皮套3和第二弹力皮套4的外壁套有弹力架5,弹力架5的内壁呈正反锥形,且弹力架5的内壁与第一弹力皮套3和第二弹力皮套4的外壁活相互挤压。利用
弹力架5对第一弹力皮套3和第二弹力皮套4的压力,增加第一弹力皮套3和第二弹力皮套4的收缩作用力,从而提高了第一弹力皮套3和第二弹力皮套4与目标杆形手术工具1之间的压紧作用力。
27.请参阅图1和2,识别壳架2包括大球块21、壳体22、小球块23和正方块25,壳体22由三个三角形组成,大球块21的下端固定连接在壳体22的一角,正方块25固定连接在壳体22的另一角,小球块23与壳体22的三面交汇点固定,第一弹力皮套3和第二弹力皮套4固定安装在壳体22的下部内端。当识别壳架2处于ct和mri影像里时,利用大球块21和小球块23作为z坐标识别,利用小球块23和正方块25作为y坐标识别,剩余一角与小球块23作为x坐标识别,方便了肉眼通过二维平面直接形像判断目标杆形手术工具1的角度,采用电脑读取数据时,分析图像大球块21和小球块23,通过大小分辨大球块21和小球块23,通过形状非圆的一端且存在识别块的一端判断为正方块25,然后同理得出x、y和z轴,通过x、y和z轴的缩短幅度计算识别壳架2的三维角度,从而降低了图像识别技术难度。
28.请参阅图2,识别壳架2还包括磁感应块24,磁感应块24固定连接在壳体22的背向小球块23的边角处。通过磁感应块24辅助感应器捕捉位置,从而方便了磁感应器直接收集坐标信息。
29.请参阅图2和3,第一弹力皮套3包括第一套体32,第一套体32的下端卡接固定在壳体22的下部内端,目标杆形手术工具1贯穿第一套体32。利用第一套体32的弹力向内挤压固定目标杆形手术工具1。
30.请参阅图3,第一弹力皮套3还包括第一弹力挤压块31,第一弹力挤压块31均匀布置在第一套体32的内端,第一弹力挤压块31和第一套体32为一体结构。利用第一弹力挤压块31增加第一套体32内端可形变幅度。
31.请参阅图2、3和4,第二弹力皮套4包括第二套体42,第二套体42的上部卡接固定在壳体22的下部内端,第二套体42的上端与第一套体32的下端固定连接为一体。利用第一套体32与第二套体42夹紧壳体22的方式固定第一弹力皮套3和第二弹力皮套4。
32.请参阅图4,第二弹力皮套4还包括第二弹力挤压块41,第二弹力挤压块41均匀布置在第二套体42的内壁,第二弹力挤压块41和第二套体42为一体结构。利用第二弹力挤压块41增加第二套体42内端的可形变幅度。
33.请参阅图2、3、4和5,弹力架5包括第一挤压环51、拉力弹簧52和第二挤压环53,拉力弹簧52滑动贯穿壳体22,拉力弹簧52的上端固定连接在第一挤压环51的下端,拉力弹簧52的下端固定连接在第二挤压环53的上端,第一挤压环51和第二挤压环53的内侧设置有锥形挤压面。利用拉力弹簧52为第一挤压环51和第二挤压环53提供拉力,使得第一挤压环51、第二挤压环53向内挤压第一套体32和第二套体42,从而使得第一套体32和第二套体42向内收缩进一步压紧目标杆形手术工具1。
34.请参阅图5,拉力弹簧52设置有三个,拉力弹簧52的上端固定连接有第一加固块,第一加固块与第一挤压环51固定连接,拉力弹簧52的下端固定连接有第二加固块,第二加固块与第二挤压环53固定连接。利用第一加固块增加拉力弹簧52与第一挤压环51的连接范围,利用第二加固块增加第二挤压环53与拉力弹簧52的连接范围,提高了拉力弹簧52、第一挤压环51以及拉力弹簧52和第二挤压环53之间的牢固度。
35.工作原理:当识别壳架2处于ct和mri影像里时,利用大球块21和小球块23作为z坐
标识别,利用小球块23和正方块25作为y坐标识别,剩余一角与小球块23作为x坐标识别,方便了肉眼通过二维平面直接形像判断目标杆形手术工具1的角度,采用电脑读取数据时,分析图像大球块21和小球块23,通过大小分辨大球块21和小球块23,通过形状非圆的一端且存在识别块的一端判断为正方块25,然后同理得出x、y和z轴,通过x、y和z轴的缩短幅度计算识别壳架2的三维角度;安装目标杆形手术工具1时,将第一挤压环51和第二挤压环53向外拉开,使得第一套体32的向外展开恢复,同时利用摩擦力稳定松开状态,再将目标杆形手术工具1塞入第一套体32和第二套体42内侧,直到目标杆形手术工具1贯穿第一套体32和第二套体42,需要加固时,按压第一挤压环51和第二挤压环53,利用拉力弹簧52的弹力以及第一套体32和第二套体42与弹力架5之间的摩擦力辅助稳定状态,起到加固目标杆形手术工具1的作用。
36.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1