股骨头旋转中心计算方法与系统与流程
1.本发明涉及手术导航系统技术领域,特别是涉及一种股骨头旋转中心计算方法与系统。
背景技术:
2.全膝关节置换术(total knee replacement,tkr)是解决影响患者活动功能的膝关节严重病损的最有效的手术之一,能够有效提高患者的生活质量。但是目前传统的人工膝关节置换手术非常依赖于临床医生的经验,由于假体松动、脱位、断裂和感染噪声的失败率达5%~8%。相比于传统的人工膝关节置换手术,膝关节置换手术导航系统将计算机图像处理与机器人精准规划结合起来,对受力与运动分析进行智能化评估,辅助临床医生完成膝关节置换手术,能够减少手术损伤,减少手术时间,提高手术成功率与质量。
3.全膝关节置换术的目标是手术后患者的股骨力线与胫骨力线完全重合,所以膝关节置换手术导航系统需要计算得到股骨头中心从而获取股骨力线来评价手术是否成功,因此,研究股骨头旋转中心计算方法与系统意义重大。
技术实现要素:
4.本发明要解决的技术问题是提供一种股骨头旋转中心计算方法与系统,能够准确计算得到股骨头旋转中心点,简单、方便、鲁棒性好。
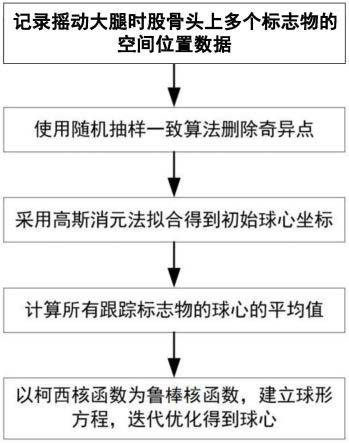
5.为解决上述技术问题,本发明提供了一种股骨头旋转中心计算方法,所述方法包括:记录摇动大腿时股骨头上多个标志物的空间位置数据;使用随机抽样一致算法删除空间位置数据的奇异点;采用高斯消元法拟合得到空间位置数据的初始球心坐标;计算所有标志物的球心坐标的平均值;将球心的平均值作为初始值,以柯西核函数为鲁棒核函数,以删除奇异点后的所有跟踪标志物的信息为基础,建立球形方程,进行非线性迭代优化,得到球心坐标。
6.在一些实施方式中,采用高斯消元法拟合得到空间位置数据的初始球心坐标,包括:根据构造的函数,利用高斯消元法拟合得到空间位置数据的初始球心坐标。
7.在一些实施方式中,构造的函数具有如下的形式:
[0008][0009]
其中,x0是初始球心坐标的x轴坐标,y0是初始球心坐标的y轴坐标,z0是初始球心坐标的z轴坐标,xi是空间位置数据的x轴坐标,yi是空间位置数据的y轴坐标,zi是空间位置数据的z轴坐标,r是球体半径。
[0010]
在一些实施方式中,根据构造的函数,利用高斯消元法拟合得到空间位置数据的初始球心坐标,包括:通过求解由构造的函数推导得到的方程组,拟合得到空间位置数据的初始球心坐标。
[0011]
在一些实施方式中,方程组具有如下形式:
[0012][0013][0014][0015]
其中,(ui,vi,wi)是空间位置数据的偏移量,(u0,v0,w0)是偏移量的初始值。
[0016]
此外,本发明还提供了一种股骨头旋转中心计算系统,所述系统包括:一个或多个处理器;存储装置,用于存储一个或多个程序,当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现根据前文所述的股骨头旋转中心计算方法。
[0017]
采用这样的设计后,本发明至少具有以下优点:
[0018]
通过高斯消元能够快速获取球心坐标的大概位置,再通过非线性的迭代方法快速、准确计算得到球心坐标,避免非线性迭代进入局部最优的缺陷。
附图说明
[0019]
上述仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,以下结合附图与具体实施方式对本发明作进一步的详细说明。
[0020]
图1是股骨头旋转中心计算的流程图。
具体实施方式
[0021]
以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
[0022]
本发明提出一种股骨头中心计算方法与系统,该方法能够准确计算得到股骨头旋转中心点,简单、方便、鲁棒性好。
[0023]
股骨头中心的确认是股骨力线确认的基础,也是膝关节导航系统术中假体摆放规划的前提。本发明提出一种膝关节导航系统的股骨头中心计算方法与系统。
[0024]
在股骨上安装跟踪标志物支架,在固定髋关节不动的情况下,完成摇大腿的操作,记录跟踪标志物支架中每一个跟踪标志物的空间位置。
[0025]
首先,对于每一个标志物的位置,使用随机抽样一致(ransac)算法计算标志物不同集合的方差,删除奇异点。
[0026]
然后对于每一个跟踪标志物的点集,构造一个函数
[0027][0028]
目标是计算得到(x0,y0,z0,r)使得h最小。即
[0029][0030][0031][0032][0033]
采用高斯消元法拟合得到球心坐标。设:
[0034][0035]
简化得到
[0036][0037][0038][0039]
解方程得到(u0,v0,w0),即可得到(x0,y0,z0)。
[0040]
再计算所有跟踪标志物的球心的平均值。
[0041]
将球心的平均值作为初始值,以柯西(cauchyloss)核函数为鲁棒核函数,以删除奇异点后的所有跟踪标志物的信息为基础,建立球形方程,进行非线性迭代优化,得到球心。
[0042]
建立的计算球心非线性最小二乘方程为:
[0043][0044]
柯西(cauchyloss)核函数表达式为:ρ(s)=log(1+s)
[0045]
本发明的优势在于,通过高斯消元能够快速获取球心坐标的大概位置,再通过非线性的迭代方法快速、准确计算得到球心坐标,避免非线性迭代进入局部最优的缺陷。
[0046]
以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,本领域技术人员利用上述揭示的技术内容做出些许简单修改、等同变化或修饰,均落在本发明的保护范围内。
技术特征:
1.一种股骨头旋转中心计算方法,其特征在于,包括:记录摇动大腿时股骨头上多个标志物的空间位置数据;使用随机抽样一致算法删除空间位置数据的奇异点;采用高斯消元法拟合得到空间位置数据的初始球心坐标;计算所有标志物的球心坐标的平均值;将球心的平均值作为初始值,以柯西核函数为鲁棒核函数,以删除奇异点后的所有跟踪标志物的信息为基础,建立球形方程,进行非线性迭代优化,得到球心坐标,所述球心坐标为股骨头的旋转中心。2.根据权利要求1所述的股骨头旋转中心计算方法,其特征在于,采用高斯消元法拟合得到空间位置数据的初始球心坐标,包括:根据构造的函数,利用高斯消元法拟合得到空间位置数据的初始球心坐标。3.根据权利要求2所述的股骨头旋转中心计算方法,其特征在于,构造的函数具有如下的形式:其中,x0是初始球心坐标的x轴坐标,y0是初始球心坐标的y轴坐标,z0是初始球心坐标的z轴坐标,x
i
是空间位置数据的x轴坐标,y
i
是空间位置数据的y轴坐标,z
i
是空间位置数据的z轴坐标,r是球体半径。4.根据权利要求3所述的股骨头旋转中心计算方法,其特征在于,根据构造的函数,利用高斯消元法拟合得到空间位置数据的初始球心坐标,包括:通过求解由构造的函数推导得到的方程组,拟合得到空间位置数据的初始球心坐标。5.根据权利要求4所述的股骨头旋转中心计算方法,其特征在于,方程组具有如下形式:式:式:其中,(u
i
,v
i
,w
i
)是空间位置数据的偏移量,(u0,v0,w0)是偏移量的初始值。6.一种股骨头旋转中心计算系统,其特征在于,包括:一个或多个处理器;存储装置,用于存储一个或多个程序,当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现根据权利要求1至5任意一项所述的股骨头旋转中心计算方法。
技术总结
本发明提供了一种股骨头旋转中心计算方法与系统。该方法包括:记录摇动大腿时股骨头上多个标志物的空间位置数据;使用随机抽样一致算法删除空间位置数据的奇异点;采用高斯消元法拟合得到空间位置数据的初始球心坐标;计算所有标志物的球心坐标的平均值;将球心的平均值作为初始值,以柯西核函数为鲁棒核函数,以删除奇异点后的所有跟踪标志物的信息为基础,建立球形方程,进行非线性迭代优化,得到球心坐标。本发明提供的股骨头旋转中心计算方法与系统能够准确计算得到股骨头旋转中心点,简单、方便、鲁棒性好。鲁棒性好。鲁棒性好。
技术研发人员:吴琼 丛伟建 王一闻 张巍
受保护的技术使用者:宽瑞智能科技(苏州)有限公司
技术研发日:2022.03.01
技术公布日:2022/7/29
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1