一种新型血管介入手术系统的制作方法
一种新型血管介入手术系统
[技术领域]
[0001]
本发明涉及医疗器械领域,尤其涉及心脑血管介入手术领域,具体地说是一种新型血管介入手术系统。
[
背景技术:
]
[0002]
目前的心脑血管介入手术需在影像设备的引导下,将导管、导丝等精密器械输送至血管内,对病灶进行局部诊断或治疗。其导管和导丝需通过医生手动操控,而这种形式导致医生和患者长时间暴露在辐射环境中,尤其影响手术医生和护士的身体健康。
[0003]
因此,若能提供一种血管介入手术系统,以实现远程对导丝和导管的操作,大量减少医疗影像设备对人体造成的辐射危害,将具有重要的应用价值。
[
技术实现要素:
]
[0004]
本发明的目的就是要解决上述的不足而提供一种新型血管介入手术系统,能够实现导丝和导管的远程操控,解决了传统介入手术需要近距离操作,医疗影像设备对人体造成辐射的危害。
[0005]
为实现上述目的设计一种新型血管介入手术系统,包括控制柜3、床旁机械臂4、介入驱动组件2和主控端11,所述控制柜3为落地可移动式,所述控制柜3置于手术床6旁,所述床旁机械臂4安装在控制柜3上或安装在手术床6上,所述床旁机械臂4拥有至少三个自由度,所述床旁机械臂4末端安装有介入驱动组件2,所述介入驱动组件2用于实现介入导丝25的直线运动和旋转运动,以及用于实现介入导管26的直线运动,所述主控端11为可移动式,并用于操控介入驱动组件2,所述主控端11置于手术控制室12或手术室1内进行操控。
[0006]
进一步地,还包括实时监控系统10,实时监控系统10用于观察介入驱动组件2的状态,所述实时监控系统10包括至少一个摄影设备5和至少一个监控显示设备9,所述摄影设备5用于拍摄手术情况,所述摄影设备5安装在控制柜上3或安装在床旁机械臂4末端,所述监控显示设备9用于实时观察手术情况,所述监控显示设备9放置在手术控制室12或手术室1内。
[0007]
进一步地,所述主控端11包括主动端底座13、滑轮一14、滑轮轴23、滑轮支撑座一24、齿形滑杆15、齿形滑杆支撑座16、滑杆轴承22、齿形控制环17、滑轮二20和滑轮支撑座二21,所述主动端底座13上安装有滑轮支撑座一24和滑轮支撑座二21,所述滑轮一14、滑轮二20通过滑轮轴23分别安装在滑轮支撑座一24、滑轮支撑座二21上,并绕滑轮轴23做旋转运动;所述齿形控制环17由柔性材料制成,其横截面呈齿形,所述齿形控制环17通过滑轮一14和滑轮二20张紧,所述齿形控制环17沿直线运动方向18运动时通过采集滑轮轴23的旋转速度、角度获得齿形控制环17在直线运动方向18上的运动参数,所述齿形控制环17处交叉布置有齿形滑杆15,所述齿形控制环17与齿形滑杆15通过齿形啮合连接,所述齿形控制环17沿旋转运动方向19运动时带动齿形滑杆15转动,并通过采集齿形滑杆15的旋转速度、角度获得齿形控制环17在旋转运动方向19上的运动参数。
[0008]
进一步地,所述介入驱动组件2包括驱动座28,所述驱动座28固定在床旁机械臂4末端,所述驱动座28上装设有导丝导管托板34和一次性无菌驱动盒31,所述导丝导管托板34上开设有导丝槽29和导管槽32,所述导丝槽29与导管槽32构成y形,所述导丝槽29用于限制导丝25的位置,所述导管槽32用于限制导管26的位置,所述导丝25和导管26在导丝槽29上汇聚,并同时进入y形连接器27,所述一次性无菌驱动盒31内设有导丝驱动机构,所述导丝驱动机构带动导丝做直线运动和旋转运动,所述一次性无菌驱动盒31上安装导管驱动轮一33和导管驱动轮二35,所述导管驱动轮一33与导管驱动轮二35通过摩擦力驱动导管26做前进、后退运动。
[0009]
进一步地,所述一次性无菌驱动盒31可拆卸式安装在驱动座28上,所述一次性无菌驱动盒31上罩设有透明罩30,所述透明罩30用于观察导丝驱动机构的运动。
[0010]
进一步地,所述导丝驱动机构包括旋转架48,所述旋转架48上安装有导向管一36和导向管二46,所述导向管一36、导向管二46内部中空并用于导丝25通行,所述导向管一36紧固在旋转架48上,所述导向管二46通过轴承安装在导向管座42内,并相对导向管座42绕自转轴做旋转运动,所述导向管座42紧固在旋转架48上,所述导向管座42上连接有齿轮一43,并通过转动齿轮一43实现旋转架48整体旋转,所述导向管二46上固连有齿轮二44,并通过转动齿轮二44实现导向管二46绕自转轴做旋转运动,进而实现导丝25的旋转运动,所述导向管二46上还设计有锥齿轮45,所述锥齿轮45与锥齿轮b47啮合连接,所述锥齿轮b47连接导丝夹紧机构,所述齿轮二44转动后将旋转运动通过锥齿轮45、锥齿轮b47传递到导丝夹紧机构,并由导丝夹紧机构带动导丝25作前进或后退运动。
[0011]
进一步地,所述导丝夹紧机构包括夹持盘50,所述夹持盘50呈圆柱状,所述夹持盘50绕自身轴做旋转运动,所述夹持盘50上设计有夹持面b66,所述夹持面b66上方设有沿周向分布的夹持块,所述夹持块底面的夹持面与夹持盘50的夹持面b66之间构成导丝夹持空间;所述夹持块连接在导向杆67上,所述导向杆67穿过夹持盘50上的通道,并限制夹持块沿通道做垂直于夹持面b66的直线运动;所述夹持块上方设有弹簧座39,所述弹簧座39固定安装在夹持盘50上,并随夹持盘50做同轴旋转运动,所述弹簧座39上沿周向分布并固定有弹簧,所述弹簧与夹持块对应布置;所述夹持盘50下方设有曲面盘56,所述曲面盘56固定安装于旋转架48上,所述曲面盘56上设计有高低起伏变化的曲面轨道,所述导向杆67底端与曲面盘56的曲面轨道接触连接,所述导丝25在夹持块底面的夹持面与夹持面b66的夹持下并通过夹持盘50的转动实现前进或后退运动。
[0012]
进一步地,所述曲面盘56的曲面轨道设计为,靠近旋转架48中间的位置b69到旋转架48距离最近,远离旋转架48中间的位置a57到旋转架48距离最远,且由位置b69到位置a57逐渐变高,其变化规律为直线或任意单调变化的曲线。
[0013]
进一步地,所述夹持块上部设计有弹簧安装槽64,所述弹簧安装槽64的深度使得弹簧总是处在压缩状态,所述夹持块下部设计有弧面端口68,所述弧面端口68在弹簧的弹性作用下总是与曲面盘56的曲面轨道接触。
[0014]
进一步地,所述夹持盘50持续朝一个方向做旋转运动时,夹持块的弧面端口68逐渐远离位置b69,带动导丝25运动,该夹持块底面的夹持面逐渐离开导丝25;同时,相邻的夹持块在弹簧和夹持盘50的曲面轨道的作用下,逐渐靠近曲面轨道最低位置b69,并与夹持面b66共同夹持导丝25,进而通过控制夹持盘50的转动方向,最终实现导丝25的前进和后退运
动;导丝25被夹持住时,通过转动齿轮一43实现导丝25的旋转运动。
[0015]
本发明同现有技术相比,其针对目前传统介入手术需要近距离操作,医疗影像设备对人体造成的辐射危害这一不足,提供了一种新型的血管介入手术系统,该新型血管介入手术系统能够实现导丝和导管的远程操控,从而减少了传统介入手术中医疗影像设备对人体造成的辐射危害,避免影响手术医生和护士的身体健康,具有重要的应用价值。
[附图说明]
[0016]
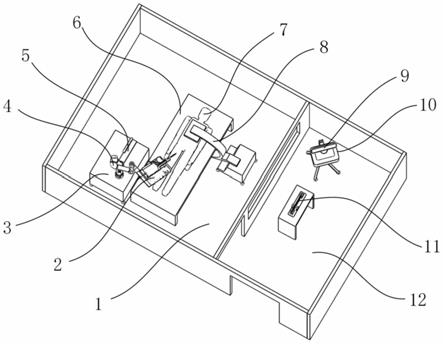
图1是本发明的结构示意图;
[0017]
图2是本发明主控端结构示意图;
[0018]
图3是本发明主动端滑轮横截面图;
[0019]
图4是本发明主动端滑杆横截面图;
[0020]
图5是本发明从动端结构示意图;
[0021]
图6是本发明导丝驱动机构结构示意图;
[0022]
图7是本发明导丝夹紧机构结构示意图;
[0023]
图8是本发明导丝夹紧机构剖视图;
[0024]
图中:1、手术室 2、介入驱动组件 3、控制柜 4、床旁机械臂 5、摄影设备 6、手术床 7、人体 8、医疗影像设备 9、监控显示设备 10、实时监控系统 11、主控端 12、手术控制室 13、主动端底座 14、滑轮一 15、齿形滑杆 16、齿形滑杆支撑座 17、齿形控制环 18、直线运动方向 19、旋转运动方向 20、滑轮二 21、滑轮支撑座二 22、滑杆轴承 23、滑轮轴 24、滑轮支撑座一 25、导丝 26、导管 27、y形连接器 28、驱动座 29、导丝槽 30、透明罩 31、一次性无菌驱动盒 32、导管槽 33、导管驱动轮一 34、导丝导管托板 35、导管驱动轮二 36、导向管一 37、夹持块一 38、夹持块二 39、弹簧座 40、夹持块三 41、夹持块四 42、导向管座 43、齿轮一 44、齿轮二 45、锥齿轮 46、导向管二 47、锥齿轮b 48、旋转架 49、夹持面四 50、夹持盘 51、夹持面一 52、弹簧一 53、弹簧二 54、弹簧三 55、夹持面三 56、曲面盘 57、位置a 58、弧面端口 59、夹持面五 60、夹持块五 61、弹簧安装槽 62、弹簧四 63、弹簧五 64、弹簧安装槽 65、夹持面二 66、夹持面b 67、导向杆 68、弧面端口 69、位置b。
[具体实施方式]
[0025]
下面结合附图对本发明作以下进一步说明:
[0026]
如附图1所示,本发明提供了一种新型血管介入手术系统,包括控制柜3、床旁机械臂4、介入驱动组件2、主控端11和实时监控系统10;控制柜3是落地可移动式的,手术时可以放置在手术床6旁,手动调整位置;控制柜3内安装电源电路、床旁机械臂4的控制器、介入驱动组件2的驱动器等电气部件;床旁机械臂4安装在控制柜3上,也可以安装在手术床6上,床旁机械臂4拥有至少三个自由度,满足手术时调整机械臂末端姿态的要求;介入驱动组件2安装在床旁机械臂4末端,介入驱动组件2可以实现介入导丝的直线运动和旋转运动,也可以实现介入导管的直线运动,以及可以实现介入导管的快速更换;主控端11是可移动的,可以放在手术控制室12进行操控,也可以放置在手术室1里操控;实时监控系统10包括至少一个摄影设备5和至少一个监控显示设备9,摄影设备5安装在控制柜上3,也可以安装在床旁机械臂4末端,用于拍摄手术情况;监控显示设备9放置在手术控制室12或手术室1内,用于
实时观察手术情况。
[0027]
如附图2至附图4所示,主控端11包括主动端底座13、滑轮一14、滑轮轴23、滑轮支撑座一24、齿形滑杆15、齿形滑杆支撑座16、滑杆轴承22、齿形控制环17、滑轮二20和滑轮支撑座二21;主控端11的主动端底座13上固定安装有滑轮支撑座一24和滑轮支撑座二21,滑轮一14、滑轮二20通过滑轮轴23分别安装在滑轮支撑座一24、滑轮支撑座二21上,并绕滑轮轴23做旋转运动;如,滑轮一14绕滑轮轴23做旋转运动,滑轮轴23安装在滑轮支撑座24上;齿形控制环17由柔性材料制造,其横截面呈齿形;齿形控制环17通过滑轮一14和滑轮二20张紧,手动沿直线运动方向18牵拉齿形控制环17,通过采集滑轮轴23的旋转速度、角度,获得齿形控制环17在直线运动方向18上的运动参数,包括速度和位移;齿形控制环17处交叉布置有齿形滑杆15,齿形控制环17与齿形滑杆15通过齿形啮合;手动捻转齿形控制环17在旋转运动方向19上运动,带动齿形滑杆15转动,通过采集齿形滑杆15的旋转速度、角度,获得齿形控制环17在旋转运动方向19上的运动参数,包括角速度和角度。
[0028]
介入驱动组件2包括驱动座28、一次性无菌驱动盒31;一次性无菌驱动盒31包括透明罩30、导丝导管托板34、旋转架48、导向管36、至少三个夹持块(以附图4为例,有夹持块一37、夹持块二38、夹持块三40、夹持块四41),还包括弹簧座39、至少三个弹簧(以附图5为例,有弹簧一52、弹簧二53、弹簧三54),一次性无菌驱动盒31还包括导向管46、锥齿轮45、锥齿轮b47、齿轮一43、齿轮二44、导向管座42、曲面盘56、夹持盘50。使用时,通过主从变换算法,将主控端11的运动映射到介入驱动组件2上,通过实时监控系统10观察介入驱动组件2的状态。具体为:术者牵拉齿形控制环17沿直线运动方向18做直线往返运动,直线运动速度记为v1,速度v1可以通过实时记录滑轮轴23的转角θ1,乘以齿形控制环17在滑轮一14处的等效半径r1后,再求微分获得;速度v1可以以比例1:1或其他比例关系,映射到介入驱动组件2中导丝25的直线运动速度v2;通过计算导丝25、弹簧座39、锥齿轮b47、锥齿轮45、齿轮二44的传动比,可以获得对应的电机转速。术者捻转齿形控制环17沿旋转运动方向19做旋转运动,旋转运动速度记为w1,速度w1可以通过实时记录齿形滑杆15的转角θ2,并对其微分获得;速度w1可以以比例1:1或其他比例关系,映射到介入驱动组件2中导丝25的旋转运动速度w2,进而获得对应的电机转速。
[0029]
如附图5所示,介入驱动组件2包括驱动座28,驱动座28固定在床旁机械臂4的末端,驱动座28上装设有导丝导管托板34和一次性无菌驱动盒31,一次性无菌驱动盒31可以在驱动座28上快速拆装,一次性无菌驱动盒31上罩设有透明罩30,透明罩30通过磁吸或机械卡扣等方式实现开关动作,通过透明罩30可以观察导丝驱动机构的运动;导丝导管托板34上开设有导丝槽29,用于限制导丝25的位置;导丝导管托板34上开设有导管槽32,用于限制导管26的位置;导丝槽29与导管槽32构成y形,导丝25和导管26在导丝槽29上汇聚,同时进入y形连接器27;一次性无菌驱动盒31内设有导丝驱动机构,导丝驱动机构带动导丝做直线运动和旋转运动,一次性无菌驱动盒31上安装导管驱动轮一33和导管驱动轮二35,导管驱动轮一33与导管驱动轮二35通过摩擦力驱动导管26做前进、后退运动。
[0030]
如附图6所示,导丝驱动机构包括旋转架48,旋转架48上安装有导向管一36和导向管二46,导向管一36、导向管二46内部中空并用于导丝25通行,导向管一36通过螺钉等方式紧固在旋转架48上,导向管二46通过轴承、自润滑轴承等方式安装在导向管座42内,可以相对导向管座42绕自转轴做旋转运动;导向管座42通过螺钉等方式紧固在旋转架48上,导向
管座42上连接有齿轮一43,通过转动齿轮一43,实现旋转架48及固连在旋转架48上的结构整体旋转;导向管二46上通过螺钉或机械配合等方式固连有齿轮二44,通过转动齿轮二44,实现导向管二46绕自转轴做旋转运动,进而实现导丝25的旋转运动;导向管二46上设计有锥齿轮45,锥齿轮45与锥齿轮b47啮合连接,锥齿轮b47连接导丝夹紧机构,通过转动齿轮二44,将旋转运动通过锥齿轮45、锥齿轮b47以及齿轮传动或带传动等方式,传递到导丝夹紧机构的夹持盘50,并由夹持盘50带动导丝25作前进或后退运动。
[0031]
如附图7和附图8所示,导丝夹紧机构包括夹持盘50,夹持盘50绕自身轴做旋转运动;夹持盘50呈圆柱状,夹持盘50上设计有夹持面b66;夹持面b66上方设有沿周向分布的夹持块,夹持块底面的夹持面与夹持盘50的夹持面b66之间构成导丝夹持空间,夹持块连接在导向杆67上,夹持盘50上有设计通道,导向杆67穿过夹持盘50上的通道,限制所有夹持块的运动方向为垂直于夹持面b66。夹持块上方设有弹簧座39,弹簧座39固定安装在夹持盘50上,并随夹持盘50做同轴旋转运动;弹簧座39上固定有沿周向分布的弹簧,弹簧与夹持块对应布置,包括附图7中弹簧一52、弹簧二53、弹簧三54,附图8中弹簧四62、弹簧五63。
[0032]
夹持盘50下方设有曲面盘56,曲面盘56固定安装于旋转架48上,曲面盘56上设计高低起伏变化的曲面轨道,以附图8为例,靠近旋转架48中间的位置b69到旋转架48距离最近,远离旋转架48中间的位置a57到旋转架48距离最远;位置b69到位置a57逐渐变高,变化规律可以是直线,也可以是任意单调变化的曲线。
[0033]
导向杆67底端与曲面盘56的曲面轨道接触连接,导丝25在夹持块底面的夹持面与夹持面b66的夹持下并通过夹持盘50的转动实现前进或后退运动;夹持块上部设计有弹簧安装槽64,弹簧安装槽64的深度使得弹簧总是处在压缩状态,夹持块下部设计有弧面端口68,弧面端口68在弹簧的弹性作用下总是与曲面盘56的曲面轨道接触。
[0034]
夹持块一37、夹持块二38、夹持块三40、夹持块四41、夹持块五60以及其他夹持块都能够垂直于夹持面b66做直线运动;以夹持块四41为例,夹持块四41上部设计有弹簧安装槽64,设计弹簧安装槽64的深度使得弹簧五63总是处在压缩状态;夹持块四41上设计有导向杆67,可限制夹持块四41沿着夹持盘50的通道做直线运动;夹持块四41下部设计有弧面端口68,由于弹簧五63的弹性作用,弧面端口68总是和夹持盘50的曲面轨道接触;弧面端口68也可以是其他形状,或采用滚动形式和夹持盘50的曲面轨道接触;夹持块四41上有夹持面二65,当夹持盘50转动到附图8位置时,夹持块四41在弹簧五63弹性作用下,其弧面端口68处在曲面盘56曲面轨道最低位置,同时夹持面二65和夹持盘50的夹持面b66共同作用,夹住导丝25。
[0035]
当夹持盘50持续朝一个方向做旋转运动时,夹持块四41的弧面端口68逐渐远离位置b69,带动导丝25运动时,夹持面二65逐渐离开导丝25;同时,夹持块一37在弹簧一52和夹持盘50的曲面轨道的作用下,逐渐靠近曲面轨道最低位置b69,并和夹持面b66共同夹持导丝25。通过控制夹持盘50的转动方向,最终实现导丝25的前进和后退运动。通过控制夹持块的数量和排布方式,使得任意时刻,存在至少一个夹持块和夹持面b66夹住导丝25;导丝25被夹持住时,通过转动齿轮一43,实现导丝25的旋转运动。
[0036]
本发明并不受上述实施方式的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1