一种连续操作介入导丝装置的制作方法
一种连续操作介入导丝装置
[技术领域]
[0001]
本发明涉及医疗器械技术领域,具体地说是一种连续操作介入导丝装置。
[
背景技术:
]
[0002]
不同于传统的在医疗影像设备引导下的血管介入手术,借助于先进工程技术手段的介入手术机器人具有远程操控、避免术者长时间暴露在辐射下的优势。血管介入手术机器人主要完成导丝和导管的操控,包括导丝的直线往返运动和旋转运动,以及导管的直线往返运动。操控的难点尤其在于导丝的运动,原因是导丝的直径很小——商业化导丝的直径一般小于1毫米,规格有0.36毫米、0.45毫米、0.63毫米等。
[0003]
若能提供一种连续操作介入导丝的装置,并适应不同尺寸规格的导丝,以实现对导丝的连续操控,则能在血管介入手术器械领域有重要的应用价值和推广潜力。
[
技术实现要素:
]
[0004]
本发明的目的就是要解决上述的不足而提供一种连续操作介入导丝装置,能够针对介入导丝直径小、规格多的现状,实现对介入导丝直线运动和旋转运动的连续操控。
[0005]
为实现上述目的设计一种连续操作介入导丝装置,包括驱动盒1以及安装于驱动盒1内的直线驱动电机2、旋转驱动电机4、介入导丝夹持组件,所述直线驱动电机2和旋转驱动电机4固定在电机安装支架5上,所述电机安装支架5固定于驱动盒1上,所述直线驱动电机2的输出端通过联轴器b20连接齿轮d19,所述旋转驱动电机4的输出端通过联轴器a6连接齿轮c18,所述齿轮d19、齿轮c18啮合连接介入导丝夹持组件,所述介入导丝夹持组件在齿轮d19、齿轮c18的驱动下带动介入导丝3作直线运动和旋转运动。
[0006]
作为优选,所述介入导丝夹持组件包括旋转平板15、连接管8和导向管a37;所述导向管a37一端固定安装有齿轮e21,齿轮e21与齿轮d19啮合连接,所述齿轮e21在齿轮d19的驱动下带动导向管a37做同轴旋转运动,所述导向管a37另一端固定安装有锥齿轮a9,所述锥齿轮a9跟随导向管a37做同轴旋转运动,所述导向管a37内部设有导向通道38,所述导向通道38作为介入导丝3的通道;所述导向管a37套设于连接管8内,所述导向管a37与连接管8做相对旋转运动,所述连接管8一端装设有齿轮f22,所述连接管8另一端安装在旋转平板15上,所述齿轮f22与齿轮c18啮合连接,所述齿轮f22在齿轮c18的驱动下旋转并带动连接管8做同轴旋转运动,同时带动旋转平板15做旋转运动;所述旋转平板15上安装有锥齿轮b10、齿轮b17、齿轮a16、主驱轮11和压紧轮,所述锥齿轮b10与锥齿轮a9啮合连接,且锥齿轮b10通过驱动轴连接齿轮b17,并带动齿轮b17做同轴旋转运动,所述齿轮b17与齿轮a16啮合连接,所述齿轮a16通过主驱轮轴31连接主驱轮11,并带动主驱轮11做同轴旋转运动,所述主驱轮11外侧面紧贴压紧带12,所述压紧带12张紧于压紧轮上,所述介入导丝3穿过导向管a37的导向通道38后,又穿过主驱轮11与压紧带12之间,并通过摩擦力跟随主驱轮11运动。
[0007]
作为优选,所述压紧轮包括压紧轮a23、压紧轮b24和压紧轮c25,所述压紧轮a23、压紧轮b24和压紧轮c25呈三角形分布,所述压紧带12由弹性材料制备,所述压紧带12的外
侧面a28与主驱轮11外侧面紧贴,并存在包络角α39。
[0008]
作为优选,所述主驱轮11外侧面上设计有v型槽26,所述压紧带12的外侧面a28上设计有t型突起29,所述v型槽26与t型突起29配合连接,所述介入导丝3穿设于v型槽26与t型突起29之间,并在主驱轮11转动时被t型突起29压在v型槽26内,通过摩擦力随主驱轮11运动。
[0009]
作为优选,所述主驱轮11外侧面上设计有挡圈a27和挡圈b30,所述挡圈a27、挡圈b30分别位于v型槽26的上、下方,并用于限制压紧带12的位置。
[0010]
作为优选,所述旋转平板15上安装有支撑架b13和导向管b14,所述导向管b14内部设有作为介入导丝3通道的导向通道二,并引导经过主驱轮11和压紧带12后的介入导丝3的运动。
[0011]
作为优选,所述压紧带12设计为分布式凸起压紧带32,所述分布式凸起压紧带32的内测面33与压紧轮a23、压紧轮b24、压紧轮c25紧贴,所述分布式凸起压紧带32的外侧面34上设计有分布式凸起35,相邻的凸起通过分隔槽36分开,所述分布式凸起35将介入导丝3压在v型槽26内,所述分隔槽36用于释放压紧带32内部应力。
[0012]
作为优选,所述连接管8中部穿装于支撑架a7内,并相对支撑架a7做旋转动作,所述支撑架a7固定安装在驱动盒1上。
[0013]
本发明同现有技术相比,针对介入导丝直径小、规格多的现状,提供了一种新型的介入导丝操作装置,能够适应不同尺寸规格的导丝,实现对介入导丝直线运动和旋转运动的连续操控,在血管介入手术器械领域具有重要的应用价值和推广潜力。
[附图说明]
[0014]
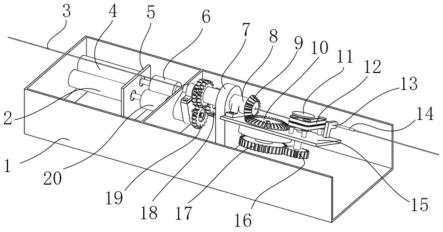
图1是本发明的立体结构示意图;
[0015]
图2是本发明介入导丝夹持组件的立体结构示意图;
[0016]
图3是图2的俯视图;
[0017]
图4是本发明主驱轮与压紧带截面图;
[0018]
图5是本发明分布式凸起压紧带的立体结构示意图;
[0019]
图6是本发明连接管与导向管a截面图;
[0020]
图中:1、驱动盒 2、直线驱动电机 3、介入导丝 4、旋转驱动电机 5、电机安装支架 6、联轴器a 7、支撑架a 8、连接管 9、锥齿轮a 10、锥齿轮b 11、主驱轮 12、压紧带 13、支撑架b 14、导向管b 15、旋转平板 16、齿轮a 17、齿轮b 18、齿轮c 19、齿轮d 20、联轴器b 21、齿轮e 22、齿轮f 23、压紧轮a 24、压紧轮b 25、压紧轮c 26、v型槽 27、挡圈a 28、外侧面a 29、t型突起 30、挡圈b 31、主驱轮轴 32、分布式凸起压紧带 33、内侧面 34、外侧面b 35、分布式凸起 36、分隔槽 37、导向管a 38、导向通道 39、包络角α。
[具体实施方式]
[0021]
如附图所示,本发明提供了一种连续操作介入导丝装置,包括驱动盒1以及安装于驱动盒1内的直线驱动电机 2、旋转驱动电机 4、介入导丝夹持组件等部分,直线驱动电机2和旋转驱动电机4固定在电机安装支架5上,电机安装支架5固定于驱动盒1上,直线驱动电机2的输出端通过联轴器b20连接齿轮d19,旋转驱动电机4的输出端通过联轴器a6连接齿轮
c18,齿轮d19、齿轮c18啮合连接介入导丝夹持组件,介入导丝夹持组件在齿轮d19、齿轮c18的驱动下带动介入导丝3作直线运动和旋转运动。
[0022]
其中,直线驱动电机2的转动通过联轴器b20传递给齿轮d19,旋转驱动电机4的转动通过联轴器a6传递给齿轮c18,直线驱动电机2和旋转驱动电机4的转动是分别独立的。齿轮d19和齿轮e21啮合,齿轮d19的转动传递给齿轮e21,二者的传动比由各自的齿数确定;齿轮c18和齿轮f22啮合,齿轮c18的转动传递给齿轮f22,二者的传动比由各自的齿数确定,可以是1:1,也可以是其他传动比。直线驱动电机2和旋转驱动电机4的运动,通过齿轮c18、齿轮d19、齿轮e21、齿轮f22传递到介入导丝夹持组件,介入导丝夹持组件通过支撑架a7进行旋转动作,支撑架a7固定安装在驱动盒1上。
[0023]
本发明中,介入导丝夹持组件包括旋转平板15、连接管8和导向管a37;导向管a37一端固定安装有齿轮e21,齿轮e21与齿轮d19啮合连接,齿轮e21在齿轮d19的驱动下带动导向管a37做同轴旋转运动,导向管a37另一端固定安装有锥齿轮a9,锥齿轮a9跟随导向管a37做同轴旋转运动,导向管a37内部设有导向通道38,导向通道38作为介入导丝3的通道;导向管a37套设于连接管8内,导向管a37与连接管8做相对旋转运动,连接管8一端装设有齿轮f22,连接管8另一端安装在旋转平板15上,齿轮f22与齿轮c18啮合连接,齿轮f22在齿轮c18的驱动下旋转并带动连接管8做同轴旋转运动,同时带动旋转平板15做旋转运动;旋转平板15上安装有锥齿轮b10、齿轮b17、齿轮a16、主驱轮11和压紧轮,锥齿轮b10与锥齿轮a9啮合连接,且锥齿轮b10通过驱动轴连接齿轮b17,并带动齿轮b17做同轴旋转运动,齿轮b17与齿轮a16啮合连接,齿轮a16通过主驱轮轴31连接主驱轮11,并带动主驱轮11做同轴旋转运动,主驱轮11外侧面紧贴压紧带12,压紧带12张紧于压紧轮上,压紧轮包括压紧轮a23、压紧轮b24和压紧轮c25,压紧轮a23、压紧轮b24和压紧轮c25呈三角形分布,压紧带12由弹性材料制备,压紧带12的外侧面a28与主驱轮11外侧面紧贴,并存在包络角α39,介入导丝3穿过导向管a37的导向通道38后,又穿过主驱轮11与压紧带12之间,并通过摩擦力跟随主驱轮11运动;连接管8中部穿装于支撑架a7内,并相对支撑架a7做旋转动作,支撑架a7固定安装在驱动盒1上;旋转平板15上安装有支撑架b13和导向管b14,导向管b14内部设有作为介入导丝3通道的导向通道二,并引导经过主驱轮11和压紧带12后的介入导丝3的运动。
[0024]
如附图4所示,主驱轮11外侧面上设计加工有v型槽26,压紧带12的外侧面a28上设计有t型突起29,v型槽26与t型突起29配合连接并共同作用,限制介入导丝3的运动;介入导丝3穿设于v型槽26与t型突起29之间,主驱轮11转动时,介入导丝3被t型突起29压在v型槽26内,通过摩擦力跟随主驱轮11运动,压紧带12也通过摩擦力跟随主驱轮11运动;主驱轮11外侧面上设计有挡圈a27和挡圈b30,挡圈a27、挡圈b30分别位于v型槽26的上、下方,并用于限制压紧带12的位置。
[0025]
如附图5所示,压紧带12可以被设计为分布式凸起压紧带32,分布式凸起压紧带32的内测面33与压紧轮a23、压紧轮b24、压紧轮c25紧贴,分布式凸起压紧带32的外侧面34上设计有分布式凸起35,分布式凸起35也可以是t型的,相邻的凸起通过分隔槽36分开,分布式凸起35将介入导丝3压在v型槽26内,分隔槽36用于释放压紧带32内部应力。
[0026]
具体地,本发明介入导丝夹持组件包括旋转平板15、连接管8、主驱轮11、压紧带12、压紧轮a23、压紧轮b24、压紧轮c25、锥齿轮a9、锥齿轮b10、支撑架b13和导向管b14等。齿轮e21固定安装在导向管a37上,齿轮e21带动导向管a37做同轴旋转运动,转动比为1:1;导
向管a37套在连接管8内,二者可以做相对旋转运动;导向管a37一端安装有锥齿轮a9;锥齿轮a9可以是通过螺钉紧固在导向管a37上,也可以通过其他机械加工方法固定在导向管a37上,锥齿轮a9跟随导向管a37做同轴旋转运动,即和齿轮e21做等比例同轴旋转运动;导向管a37内部有导向通道38,作位介入导丝的通道。
[0027]
连接管8的一端设计有齿轮f22,另一端通过紧固螺钉等方式安装在旋转平板15上;齿轮f22旋转带动连接管8做同轴旋转运动,同时带动旋转平板15做旋转运动;连接管8和导向管a37可以做相对旋转运动——连接管8的转动方向和转动速度与旋转驱动电机4相关,导向管a37的转动方向和转动速度与直线驱动电机2和旋转驱动电机4的转动方向和转动速度相关。
[0028]
旋转平板15上安装锥齿轮b10、齿轮b17、齿轮a16、主驱轮11、压紧轮a23、压紧轮b24和压紧轮c25;锥齿轮b10和锥齿轮a9构成锥齿轮传动,传动比可以是1:1,也可以是其他传动比;锥齿轮b10和齿轮b17做同轴旋转运动;齿轮b17和齿轮a16构成齿轮传动,传动比可以是1:1,也可以是其他传动比;齿轮b17和齿轮a16可以是直齿或斜齿;主驱轮11通过主驱轮轴31,和齿轮a16做同轴旋转运动。齿轮e21、锥齿轮a9、锥齿轮b10、齿轮b17、齿轮a16构成基本的传动链,带动主驱轮11绕自身旋转轴做旋转运动。
[0029]
压紧轮a23、压紧轮b24、压紧轮c25都是被动旋转轮,其位置可以微调,通过调节压紧轮a23、压紧轮b24、压紧轮c25的位置,来调节压紧带12的松弛度。压紧带12由弹性材料制备,具有一定的弹性;压紧带12的外侧面a28和主驱轮11紧贴,并存在包络角α39;通过设计不同的压紧轮a23、压紧轮b24、压紧轮c25的位置,可以获得不同大小的包络角α39。
[0030]
本发明并不受上述实施方式的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1