一种具有锁定功能的修复系统的制作方法
1.本发明涉及医疗器械领域,尤其涉及一种具有锁定功能的修复系统。
背景技术:
2.二尖瓣解剖结构复杂,包含瓣叶、瓣环、腱索与乳头肌,分别对左、右心室功能的维持起着重要作用,任何影响到瓣叶、瓣环、腱索、乳头肌和左心室的结构完整和功能正常的疾病都可能导致严重的二尖瓣关闭不全(mitral regurgitation,mr),可引起左心室衰竭、肺动脉高压、心房颤动、脑卒中和死亡。目前,二尖瓣反流是临床中最为常见的心脏瓣膜疾病,75岁以上的人群中,近10%老年人患有中度以上二尖瓣反流。随着人口老龄化,二尖瓣反流的发病将呈现明显的上升趋势。同时,二尖瓣反流的治疗不及时将严重危害患者生命健康,随着病情恶化逐步发展为心力衰竭和死亡,重症二尖瓣反流的1年死亡率高达57%。目前,外科手术是治疗二尖瓣反流的金标准,但仍有50%中度二尖瓣反流患者因年龄和合并症的原因无法接受手术治疗,未进行治疗的手术患者的1年和5年的总死亡率分别为20%和50%。对于这类患者,临床逐渐开始重视 微创介入治疗的应用。
3.经导管介入二尖瓣修复及置换理论上可使失去外科手术机会的高危患者获益。介入治疗是将人工植入物在体外装载至输送系统上,沿血管路径或穿刺心尖送达二尖瓣瓣环处,然后释放并固定以完全或部分替代自体瓣膜的功能。当前,二尖瓣介入治疗已成为相关领域研究的热点之一,众多产品均在研发中。但因二尖瓣本身及周边结构复杂等问题,二尖瓣介入器械的发展面临许多特殊困难。
4.专利cn202011511245.2提供一种带有锁闭机构的瓣膜夹,包括第一夹合臂、第二夹合臂、衔接件、推拉装置和锁定装置,所述锁定装置部分与所述衔接件配合,所述锁定装置包括锁定头和自锁杆,所述衔接件分别与所述第一夹合臂和第二夹合臂铰接,所述夹合臂包括长臂和短臂,所述长臂的一端与所述推拉装置铰链连接,所述短臂的一端设置有锁定部,操作推拉装置使所述第一夹合臂的长臂和第二夹合臂的长臂张角变大呈张开状态时,所述第一夹合臂上的锁定部与所述第二夹合臂上的锁定部部分呈错位配合状态;操作推拉装置使所述第一夹合臂的长臂和第二夹合臂的长臂张角变小呈闭合状态时,移动所述锁定装置使得所述锁定头与所述锁定部实现配合并锁定;该发明的技术缺陷在于:在锁定头与锁定部配合并完成锁定后,瓣膜夹会受到血流的冲击与自体瓣叶的牵扯,但由于锁定头与锁定部之间为点接触,锁定头会受到巨大的压力,同时锁定部受到的支撑也不稳定,导致锁定效果不佳;同时,锁定头给予锁定部的支撑力是轴向的,导致第一夹合臂、第二夹合臂与衔接件之间存在死角,第一夹合臂与第二夹合臂的摆动范围有限,夹合范围受到限制;第三,锁定部的呈弧形,长度大,在受到锁定头的支撑力时容易断裂或变形,支撑强度不大,疲劳寿命短,锁定效果不佳。
5.综上所述,由于现有技术中的锁定结构受力不稳定,疲劳寿命短,夹紧范围有限,十分影响瓣膜夹在心内的锁定效果,因此需要一种结构设计稳定,支撑强度大,同时又能兼顾锁定效果的锁定装置。
技术实现要素:
6.本发明的目的是提供一种具有锁定功能的修复系统,该修复系统具备以下优点:结构稳定,支撑强度大,又能保证夹合范围;为了解决上述技术问题,本发明通过下述技术方案得以解决:一种具有锁定功能的修复系统,包括:瓣膜夹、输送导管和锁定装置,所述瓣膜夹包括夹合臂和衔接件,所述锁定装置包括动作件与锁定单元,所述动作件与所述锁定单元可转动连接,所述动作件穿过所述衔接件,所述衔接件包括限位通道;当所述动作件受轴向力时,带动所述衔接件轴向运动从而实现夹合臂的开闭;当所述动作件受周向力时,所述动作件相对于所述衔接件转动与轴向运动,带动所述锁定单元仅沿着所述限位通道朝所述夹合臂的端部靠近或远离的轴向运动,实现对夹合臂的锁定或解锁。
7.本发明还可以通过以下技术方案进一步实现:在一个实施方式中,所述锁定单元呈棱柱状,且设置成无法在衔接件的限位通道内绕动作件的轴线旋转;并且,所述锁定单元包括连接部与锁定部,所述锁定部的形状与所述夹合臂的端部形状相配合。
8.在一个实施方式中,所述锁定单元呈块状;并且,所述锁定单元包括连接部与锁定部,所述锁定部的形状与所述夹合臂的端部形状相配合。
9.在一个实施方式中,所述锁定单元为楔形块。
10.在一个实施方式中,所述锁定单元远端部分圆滑无尖锐处。
11.在一个实施方式中,所述限位通道限制所述锁定单元仅能进行轴向运动。
12.在一个实施方式中,所述锁定单元的远端端部呈平面状。
13.在一个实施方式中,所述夹合臂包括第一动作臂与第二动作臂,所述第一动作臂与所述第二动作臂的远端均设有错位爪;并且,所述错位爪大体上呈直线状,所述错位爪包括支撑面。
14.在一个实施方式中,所述错位爪与所述第一动作臂大体上呈垂直状。
15.在一个实施方式中,所述错位爪与所述第二动作臂大体上呈垂直状。
16.在一个实施方式中,所述错位爪包括多个爪件。
17.在一个实施方式中,所述错位爪包括三个爪件。
18.在一个实施方式中,所述动作件受轴向力进行轴向运动,并带动所述夹合臂开合。
19.在一个实施方式中,所述夹合臂与所述衔接件为活动连接,所述夹合臂运动时与所述瓣膜夹中心线呈-10
°
~ 60
°
;并且,在所述第一动作臂与所述第二动作臂动作过程中,其二者的错位爪错位配合,或者其二者的错位爪之间具有一定间隙。
20.在一个实施方式中,所述第一动作臂和所述瓣膜夹中心线所呈的角度与所述第二动作臂和所述瓣膜夹中心线所呈的角度大小相等。
21.在一个实施方式中,捕捉自体瓣叶时,所述第一动作臂与所述瓣膜夹中心线呈30
°
~45
°
。
22.在一个实施方式中,所述锁定部包括第一锁定面与第二锁定面,其中,所述第二锁定面与所述锁定单元中心线平行,所述第一锁定面与所述锁定单元中心线呈一定夹角。
23.在一个实施方式中,所述第一锁定面为圆弧面。
24.在一个实施方式中,所述第二锁定面与所述限位通道配合连接,所述限位通道限
制所述第二锁定面只能进行轴向运动。
25.在一个实施方式中,锁定夹合臂时,所述锁定单元朝所述夹合臂的错位爪运动,所述锁定单元逐渐进入所述第一动作臂与所述第二动作臂二者的错位爪之间的间隙;并且,当所述第一锁定面抵住所述支撑面且所述锁定单元无法继续朝远端运动时,所述锁定单元完成了对所述夹合臂的锁定。
26.在一个实施方式中,所述第一锁定面一旦抵住所述支撑面,所述支撑面即受到轴向支撑力与横向支撑力。
27.在一个优选的实施方式中,所述锁定单元锁定所述夹合臂后,所述支撑面和所述锁定单元中心线所呈的角度与所述第一锁定面和所述锁定单元中心线所呈的角度大小相等。
28.在一个实施方式中,所述动作件与所述锁定单元为活动连接,且所述动作件与所述锁定单元通过所述连接部连接,所述锁定单元套设在所述动作件外。
29.在一个实施方式中,所述动作件包括连接头,所述连接头的近端的轴截面长度大于所述锁定部的近端的轴截面长度。
30.在一个实施方式中,所述连接头与所述连接部配合连接。
31.在一个实施方式中,所述连接头的轴截面呈矩形、椭圆形、多边形或者圆壶状;并且,所述连接头外表面光滑。
32.在一个实施方式中,所述连接头为实心或者空心状。
33.在一个实施方式中,所述锁定部包括第一组合部与第二组合部,所述第一组合部与所述第二组合部为可拆卸连接。
34.在一个实施方式中,所述衔接件还包括锁定通道,锁定通道壁面设有螺纹结构,所述锁定通道穿过所述衔接件的中心;并且,所述动作件也设有螺纹连接面,所述动作件与所述锁定通道连接,所述动作件若要进行相对于所述衔接件的轴向运动,只能通过旋转运动。
35.在一个实施方式中,所述瓣膜夹还包括伸缩套管,所述伸缩套管与输送导管连接,所述动作件套设在所述伸缩套管内,当所述动作件做轴向运动或旋转运时,所述输送导管为所述动作件提供轴向支撑与轴向扭矩。
36.在一个实施方式中,所述瓣膜夹还包括压瓣件和联动杆,所述输送导管还包括控制释放机构,其中,所述压瓣件上设有连接环,所述控制释放机构包括释放件与控制管,所述控制管与所述伸缩套管形成控制部,在捕捉自体瓣叶前,所述释放件穿过所述连接环与所述控制部连接使得所述压瓣件贴靠所述伸缩套管。
37.在一个实施方式中,所述控制管与所述伸缩套管为可拆卸连接,当所述控制管与所述伸缩套管脱离时,所述控制部释放所述释放件,所述压瓣件将自体瓣叶夹合在所述压瓣件与所述联动杆之间。
38.在一个实施方式中,所述压瓣件为形状记忆合金材料,所述释放件初始为拉紧状态,当松开所述释放件后,所述压瓣件根据自身特性直接将自体瓣叶夹合在所述压瓣件与所述联动杆之间与现有技术相比,本发明的优点在于:1. 区别于现有技术,本发明中的衔接件包括限位通道,在锁定瓣膜夹时,动作件相对衔接件转动并朝远端轴向运动,与此同时,由于锁定单元设置在所述动作件的远端,锁
锁定装置,31-动作件,311-连接头,312-螺纹连接面, 32-锁定单元,321-连接部,322-锁定部,3221-第一锁定面,3222-第二锁定面,33-第一组合部,34-第二组合部,4-控制释放机构,41-释放件,42-控制管。
具体实施方式
47.在以下对附图和具体实施方式的描述中,将阐述本技术的一个或多个实施例的细节。从这些描述、附图以及权利要求中,可以清楚本技术的其它特征、目的和优点。
48.应当理解,所图示和描述的实施例在应用中不限于在以下描述中阐明或在附图中图示的构件的构造和布置的细节。所图示的实施例可以是其它的实施例,并且能够以各种方式来实施或执行。各示例通过对所公开的实施例进行解释而非限制的方式来提供。实际上,将对本领域技术人员显而易见的是,在不背离本技术公开的范围或实质的情况下,可以对本技术的各实施例作出各种修改和变型。例如,作为一个实施例的一部分而图示或描述的特征,可以与另一实施例一起使用,以仍然产生另外的实施例。因此,本技术公开涵盖属于所附权利要求及其等同要素范围内的这样的修改和变型。
49.同样,可以理解,本文中所使用的词组和用语是出于描述的目的,而不应当被认为是限制性的。本文中的“包括”、“包含”或“具有”及其变型的使用,旨在开放式地包括其后列出的项及其等同项以及附加的项。
50.下面将参考本技术的若干方面的不同的实施例和示例对本技术进行更详细的描述。
51.本技术中,术语“近端”或“近侧”是指离手术操作者较近的一端或一侧,“远端”或“远侧”是指离手术操作者较远的一端或一侧。
52.本技术中,在夹合臂由张开状态摆动至与瓣膜夹中心线平行的过程中,夹合臂与瓣膜夹的中心线所呈的角度为正角度;在夹合臂与瓣膜夹中心线平行后,若夹合臂继续朝瓣膜夹中心线摆动,此时夹合臂与瓣膜夹的中心线所呈的角度为负角度。
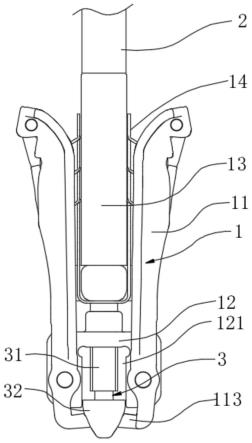
53.实施例一:在用于二尖瓣瓣膜疾病治疗时,如图1a和1b所示,一种具有锁定功能的修复系统,包括:瓣膜夹1、输送导管2和锁定装置3,所述瓣膜夹1包括夹合臂11和衔接件12,所述锁定装置3包括动作件31与锁定单元32,所述动作件31与所述锁定单元32可转动连接,所述动作件31穿过所述衔接件12,所述衔接件12包括限位通道121;当所述动作件31受轴向力时,带动所述衔接件12轴向运动从而实现夹合臂11的开闭;当所述动作件31受周向力时,所述动作件31相对于所述衔接件12转动与轴向运动,带动所述锁定单元32仅沿着所述限位通道121朝所述夹合臂11的端部靠近或远离的轴向运动,实现对夹合臂11的锁定或解锁。
54.下面将结合附图详细描述本发明的带有锁定装置3的修复系统各部件的组成和连接方式;本实施例中,所述锁定单元32呈棱柱状,且设置成无法在衔接件12的限位通道121内绕所述动作件31的轴线旋转;并且,所述锁定单元32包括连接部321与锁定部322,所述锁定部322的形状与所述夹合臂11的端部形状相配合,如图2a所示。
55.本实施例中,所述锁定单元32为楔形块,且所述锁定单元32远端部分圆滑无尖锐处。
56.本实施例中,所述锁定部322包括第一锁定面3221与第二锁定面3222,如图2b所示,其中,所述第二锁定面3222与所述锁定单元32中心线平行,所述第一锁定面3221与所述锁定单元32中心线呈一定夹角。
57.本实施例中,所述第二锁定面3222与所述限位通道121配合连接,所述限位通道121限制所述第二锁定面3222只能进行轴向运动,如图2c所示。
58.本实施例中,所述锁定部322包括第一组合部33与第二组合部34,所述第一组合部33与所述第二组合部34为可拆卸连接,如图2d和2e所示。
59.本实施例中,所述夹合臂11包括第一动作臂111与第二动作臂112,所述第一动作臂111与所述第二动作臂112的远端均设有错位爪113;并且,所述错位爪113大体上呈直线状,所述错位爪113包括支撑面1131。
60.本实施例中,所述错位爪113与所述第一动作臂111大体上呈垂直状,且所述错位爪113包括三个爪件1132,如图2f所示。
61.本实施例中,所述动作件31受轴向力进行轴向运动,并带动所述夹合臂11开合。
62.本实施例中,所述夹合臂11与所述衔接件12为活动连接,所述夹合臂11运动时与所述瓣膜夹1中心线呈-10
°
~ 60
°
,如图3a和1b所示;并且,在所述第一动作臂111与所述第二动作臂112动作过程中,其二者的错位爪113错位配合,如图4b所示,或者其二者的错位爪113之间具有一定间隙,如图4c所示。
63.本实施例中,捕捉自体瓣叶时,所述第一动作臂111与所述瓣膜夹1中心线呈30
°
~45
°
。
64.本实施例中,所述第一动作臂111和所述瓣膜夹1中心线所呈的角度与所述第二动作臂112和所述瓣膜夹1中心线所呈的角度大小相等,如图4a所示。
65.本实施例中,锁定夹合臂11时,所述锁定单元32朝所述夹合臂11的错位爪113运动,所述锁定单元32逐渐进入所述第一动作臂111与所述第二动作臂112二者的错位爪113之间的间隙;并且,当所述第一锁定面3221抵住所述支撑面1131且所述锁定单元32无法继续朝远端运动时,所述锁定单元32完成了对所述夹合臂11的锁定。
66.本实施例中,所述第一锁定面3221一旦抵住所述支撑面1131,所述支撑面1131即受到轴向支撑力与横向支撑力。
67.本实施例中,所述动作件31与所述锁定单元32为活动连接,且所述动作件31与所述锁定单元32通过所述连接部321连接,所述锁定单元32套设在所述动作件31外。
68.本实施例中,所述动作件31包括连接头311,所述连接头311的近端的轴截面长度大于所述锁定部322的近端的轴截面长度, 所述连接头311与所述连接部321配合连接,如图3b所示。
69.本实施例中,所述衔接件12还包括锁定通道122,锁定通道122壁面设有螺纹结构1221,所述锁定通道122穿过所述衔接件12的中心;并且,所述动作件31也设有螺纹连接面312,所述动作件31与所述锁定通道122连接,所述动作件31若要进行相对于所述衔接件12的轴向运动,只能通过旋转运动,如图3b所示。
70.本实施例中,所述瓣膜夹1还包括伸缩套管13,所述伸缩套管13与输送导管2连接,所述动作件31套设在所述伸缩套管13内,当所述动作件31做轴向运动或旋转运时,所述输送导管2为所述动作件31提供轴向支撑与轴向扭矩。
71.本实施例中,所述瓣膜夹1还包括压瓣件14和联动杆15,所述输送导管2还包括控制释放机构4,其中,所述压瓣件14上设有连接环141,所述控制释放机构4包括释放件41与控制管42,所述控制管42与所述伸缩套管13形成控制部,在捕捉自体瓣叶前,所述释放件41穿过所述连接环141与所述控制部连接使得所述压瓣件14贴靠所述伸缩套管13,如图4a所示。
72.本实施例中,所述压瓣件14为形状记忆合金材料,所述释放件41初始为拉紧状态,当松开所述释放件41后,所述压瓣件14根据自身特性直接将自体瓣叶夹合在所述压瓣件14与所述联动杆15之间,如图4b和4c所示。
73.本发明的工作原理为:1.操作所述输送导管2运送所述瓣膜夹1从下腔静脉进入心脏,随后操作输送导管2使得所述瓣膜夹1穿过房间隔,继续操作所述输送导管2弯曲使得所述瓣膜夹1正对二尖瓣;2.操作所述动作件31朝远端轴向移动,直至第一动作臂111和第二动作臂112摆动至张角最大处,如图4a所示;3.操作所述输送导管2使瓣膜夹1穿过二尖瓣,并在自体瓣叶运动至最佳夹合位置时,操作控制释放机构4使得自体瓣叶被固定在所述压瓣件14与联动杆15之间,如图4b和4c所示;4. 操作所述动作件31朝近端轴向移动,直至第一动作臂111和第二动作臂112摆动至张角最小处,如图4d所示;5.旋转所述动作件31使得所述锁定装置3相对所述衔接件12朝远端发生轴向移动,当所述锁定单元32抵住所述错位爪113的支撑且无法继续朝远端运动时,所述锁定单元32完成了对所述夹合臂11的锁定,实现瓣膜夹1锁定目的,如图4e所示;6.操作所述控制管42与所述瓣膜夹1分离并撤离体内,如图4f所示。
74.以上内容仅为本发明的较佳实施例,对于本领域的普通技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1