一种便携式近距离后装治疗机的制作方法
1.本发明涉及医疗仪器技术领域,具体为一种便携式近距离后装治疗机。
背景技术:
2.近距离放射治疗是一种短距离放射治疗,治疗时将放射源置于患者体表或体内,靶区可以受到很高的剂量,剂量在靶区外迅速下降。1898年,法国物理学家居里夫妇从镭沥青矿中首次提炼出天然放射性核素226ra。1900年,开始用226ra治疗皮肤癌。1903年,首次将226ra插入到肿瘤内进行治疗。1915年,泌尿外科医生benjamin barringer首先将镭源植入到前列腺。20 世纪60年代,226ra是主要的腔内治疗源。但近距离放疗医生很快意识到 226ra的缺点,即需要较高的穿刺技术和快速的操作,以免自己及其他工作人员受到过量照射。1956年,henschke开发了192ir,随后用于粒子短暂性植入和后装系统。20世纪60年代,60co作为226ra的替代源用于腔内治疗。 1960年,英国amersham及美国3m公司开发了137cs,得益与其低成本处理技术及安全管理,70年代得到广泛应用。近距离治疗另一创新研究是远程后装技术,大大降低了工作人员的职业辐射暴露剂量。20世纪60年代,钛管封装的125i粒籽源开始临床应用,1972年whitmore首次报道通过耻骨后插入 125i粒籽治疗前列腺癌。103pd、131cs等低能光子源的应用,显著降低了照射带来的危害,患者也不必单独隔离治疗。近距离放射治疗问世一个世纪以来,在肿瘤治疗中发挥着重要作用。
3.现有技术中便携式近距离后装治疗机存在的缺陷是:
4.1、现在的后装机安装在一个固定基座上,通过手动推动基座移动到指定位置,不能够自动移动。
5.2、现有的后装机通过上升或下降移动,让后装机治疗头靠近患者,但离患者还有较远距离,运动不灵活,移动不智能。
6.3、现有后装机辐射源的活度检测,均采用手动与活度计对接,操作繁琐。
技术实现要素:
7.本发明的目的在于提供一种便携式近距离后装治疗机,以解决上述背景技术中提出的问题。
8.为实现上述目的,本发明提供如下技术方案,一种便携式近距离后装治疗机,包括移动板,所述移动板的底部安装有支撑盒,所述支撑盒的内侧安装有控制电机,所述移动板的底部安装有轴承座,且轴承座位于支撑盒的后方,所述轴承座的内侧贯穿安装有轴承杆,所述轴承杆的外侧安装有第一移动轮,第一移动轮位于轴承座的内侧,所述轴承杆的外侧安装有从动齿轮,所述移动板的底部安装有壳体,从动齿轮位于壳体的内侧;
9.所述移动板的顶部安装有固定板,所述移动板的顶部安装有固定壳,固定壳位于固定板的后方;
10.所述移动板的顶部安装有安装槽,安装槽位于固定壳的后方。
11.优选的,所述固定板的内侧安装有光学引导系统,所述移动板的内侧安装有激光
雷达,且激光雷达位于光学引导系统的下方。
12.优选的,所述控制电机的输出端安装有传动杆,传动杆贯穿支撑盒的底壁,所述传动杆的底端安装有轴承架,所述轴承架的内侧通过连接杆活动安装有第二移动轮。
13.优选的,所述壳体的内侧活动安装有旋转杆,所述旋转杆的外侧安装有主动齿轮,主动齿轮与从动齿轮相嵌合,所述壳体的一侧外壁安装有驱动电机。
14.优选的,所述安装槽的内侧嵌合安装有活度计。
15.优选的,所述固定壳的内侧安装有固定架,所述固定架的底部安装有伺服电机,所述伺服电机的输出端连接有转动杆,转动杆贯穿固定架的内侧,所述固定壳的顶部安装有引导座,所述转动杆的顶端安装有旋转台,所述旋转台的底部安装有限位滚轮,限位滚轮位于旋转台的内侧。
16.优选的,所述旋转台的顶部安装有安装架,所述安装架的一侧安装有第一调节电机所述,安装架的内侧通过连接件安装有第一活动杆,第一调节电机的输出端与第一活动杆连接,所述第一活动杆的顶端通过连接件活动安装有第二活动杆,所述第一活动杆的一侧安装有第二调节电机,第二调节电机的输出端与第二活动杆活动连接,所述第二活动杆的顶端内侧活动安装有连接板,所述第二活动杆的一侧顶端安装有第三调节电机,第三调节电机的输出端与连接板的一侧连接。
17.优选的,所述连接板的顶端安装有组装架,所述组装架的内侧通过连接件活动安装有后装机,所述组装架的一侧安装有第四调节电机,第四调节电机的输出端通过连接件与后装机连接,后装机的一端安装有导线,导线的一端安装有辐射源。
18.与现有技术相比,本发明的有益效果如下:
19.1、本发明通过安装有伺服电机,伺服电机运行带动输出端的转动杆转动,转动杆旋转带动顶端的旋转台转动,旋转台转动带动底端的限位滚轮进行移动,限位滚轮在引导座的引导下移动,避免装置在移动的过程中发生偏移,方便装置调整顶部设备的角度,旋转台对顶部的安装架进行固定,保证安装架保持稳定,安装架对内侧的第一活动杆支撑,方便第一活动杆可以调节角度,第一调节电机运行带动输出端的第一活动杆转动,使得第一活动杆调整到合适的角度,同时第二调节电机转动带动输出端的第二活动杆进行转动,第二活动杆调整角度带动顶端的结构移动,同时第三调节电机运行带动输出端的连接板调整角度,连接板带动顶端的组装架活动,带动组装架内侧的后装机调整角度,第四调节电机运行带动输出的后装机调整角度,装置灵活运动,可带动后装机到达任意位置,可尽可能的靠近施源器,减少额外的辐射,并可缩短源传输时间。
20.2、本发明通过安装有光学引导系统和激光雷达,驱动电机运行带动输出端的主动齿轮转动,主动齿轮转动带动底部的从动齿轮旋转,从动齿轮旋转带动轴承杆转动,轴承杆旋转带动外侧的第一移动轮转动,第一移动轮转动带动设备位移,第一移动轮推动第二移动轮跟着转动,方便装置灵活的调整位置,在装置移动的过程中,固定板对内侧的光学引导系统和激光雷达固定,保证光学引导系统和激光雷达平稳运行,光学引导系统和激光雷达对前方事物进行识别确认,用于引导装置的运动和自动避障,实现装置通过光学引导自动到达指定位置,无需人工推动,并可自动返回。激光雷用于避障和碰撞监测。底座可以前后、左右自由移动,
21.3、本发明通过安装有活度计,安装槽对顶部的活度计固定进行固定,机械臂可以
在调整完成后,后装机与活度计对接,自动完成检测,测量辐射源活度。
附图说明
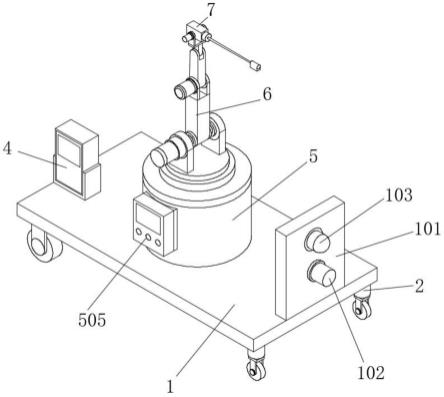
22.图1为本发明的整体结构示意图;
23.图2为本发明的侧面结构示意图;
24.图3为本发明的第一活动杆结构示意图;
25.图4为本发明的移动板结构示意图;
26.图5为本发明的支撑盒结构示意图;
27.图6为本发明的壳体结构示意图。
28.图中:1、移动板;101、固定板;102、激光雷达;103、光学引导系统; 104、轴承座;105、轴承杆;106、第一移动轮;107、从动齿轮;2、支撑盒; 201、控制电机;202、传动杆;203、轴承架;204、第二移动轮;3、壳体;301、旋转杆;302、主动齿轮;303、驱动电机;4、活度计;401、安装槽; 5、固定壳;501、固定架;502、伺服电机;503、转动杆;504、引导座;6、第一活动杆;601、旋转台;602、限位滚轮;603、安装架;604、第一调节电机;605、第二调节电机;606、第二活动杆;607、第三调节电机;7、后装机;701、连接板;702、组装架;703、第四调节电机;704、导线;705、辐射源。
具体实施方式
29.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
30.在本发明的描述中,需要说明的是,术语“上”、“下”、“内”、“外”“前端”、“后端”、“两端”、“一端”、“另一端”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
31.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“设置有”、“连接”等,应做广义理解,例如“连接”,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
32.请参阅图1、图2、图3、图4、图5、图6,一种便携式近距离后装治疗机;
33.包括移动板1,所述移动板1的底部安装有支撑盒2,所述支撑盒2的内侧安装有控制电机201,所述控制电机201的输出端安装有传动杆202,传动杆202贯穿支撑盒2的底壁,所述传动杆202的底端安装有轴承架203,所述轴承架203的内侧通过连接杆活动安装有第二移动轮204,支撑盒2固定在移动板1的底部,保证支撑盒2的稳定性,支撑盒2对内侧的控制电机201固定,保证控制电机201可以平稳运行,支撑盒2的底部安装传动杆202,传动杆202的底端通过轴承架203连接第二移动轮204,第二移动轮204抵在地面上,在装置移动时,
第二移动轮204旋转带动装置移动,保证可以稳定位移,所述移动板1的底部安装有轴承座104,且轴承座104位于支撑盒2的后方,所述轴承座104的内侧贯穿安装有轴承杆105,所述轴承杆105的外侧安装有第一移动轮106,第一移动轮106位于轴承座104的内侧,所述轴承杆105的外侧安装有从动齿轮107,轴承座104固定在移动板1的底部,保证轴承座 104的稳定性,轴承座104对内侧的轴承杆105限制,保证轴承杆105可以平稳运行,第一移动轮106抵在地面上,所述移动板1的底部安装有壳体3,从动齿轮107位于壳体3的内侧,所述壳体3的内侧活动安装有旋转杆301,所述旋转杆301的外侧安装有主动齿轮302,主动齿轮302与从动齿轮107相嵌合,所述壳体3的一侧外壁安装有驱动电机303,壳体3固定在移动板1的底部,方便壳体3对内侧的主动齿轮302支撑,驱动电机303运行带动输出端的主动齿轮302转动,主动齿轮302转动带动底部的从动齿轮107旋转,从动齿轮107旋转带动轴承杆105转动,轴承杆105旋转带动外侧的第一移动轮106转动,第一移动轮106转动带动设备位移,第一移动轮106推动第二移动轮204跟着转动,方便装置灵活的调整位置;
34.所述移动板1的顶部安装有固定板101,所述固定板101的内侧安装有光学引导系统103,所述移动板1的内侧安装有激光雷达102,且激光雷达102 位于光学引导系统103的下方,固定板101固定在移动板1的顶部,保证固定板101的稳定性,固定板101对内侧的光学引导系统103和激光雷达102 固定,保证光学引导系统103和激光雷达102平稳运行,光学引导系统103 和激光雷达102对前方事物进行识别确认,用于引导装置的运动和自动避障。
35.所述移动板1的顶部安装有固定壳5,固定壳5位于固定板101的后方,所述固定壳5的内侧安装有固定架501,所述固定架501的底部安装有伺服电机502,所述伺服电机502的输出端连接有转动杆503,转动杆503贯穿固定架501的内侧,所述固定壳5的顶部安装有引导座504,所述转动杆503的顶端安装有旋转台601,所述旋转台601的底部安装有限位滚轮602,限位滚轮 602位于旋转台601的内侧,固定壳5固定在移动板1的顶部,保证固定壳5 的稳定性,固定壳5对内侧的固定架501固定,方便固定架501对底部的伺服电机502固定,伺服电机502运行带动输出端的转动杆503转动,转动杆 503旋转带动顶端的旋转台601转动,旋转台601转动带动底端的限位滚轮 602进行移动,限位滚轮602在引导座504的引导下移动,避免装置在移动的过程中发生偏移,方便装置调整顶部设备的角度,所述旋转台601的顶部安装有安装架603,所述安装架603的一侧安装有第一调节电机604所述,安装架603的内侧通过连接件安装有第一活动杆6,第一调节电机604的输出端与第一活动杆6连接,所述第一活动杆6的顶端通过连接件活动安装有第二活动杆606,所述第一活动杆6的一侧安装有第二调节电机605,第二调节电机 605的输出端与第二活动杆606活动连接,所述第二活动杆606的顶端内侧活动安装有连接板701,所述第二活动杆606的一侧顶端安装有第三调节电机 607,第三调节电机607的输出端与连接板701的一侧连接,所述连接板701 的顶端安装有组装架702,所述组装架702的内侧通过连接件活动安装有后装机7,所述组装架702的一侧安装有第四调节电机703,第四调节电机703的输出端通过连接件与后装机7连接,后装机7的一端安装有导线704,导线 704的一端安装有辐射源705,旋转台601对顶部的安装架603进行固定,保证安装架603保持稳定,安装架603对内侧的第一活动杆6支撑,方便第一活动杆6可以调节角度,第一调节电机604运行带动输出端的第一活动杆6 转动,使得第一活动杆6调整到合适的角度,同时第二调节电机605转动带动输出端的第二活动杆606进行转动,第二活动杆606调整角度带动顶端的结构移动,同时第三调节电机607运行带动输出端的连
接板701调整角度,连接板701带动顶端的组装架702活动,带动组装架702内侧的后装机7调整角度,第四调节电机703运行带动输出的后装机7调整角度,装置灵活运动,可带动后装机7到达任意位置,可尽可能的靠近施源器,减少额外的辐射,并可缩短源传输时间;
36.所述移动板1的顶部安装有安装槽401,安装槽401位于固定壳5的后方,所述安装槽401的内侧嵌合安装有活度计4,安装槽401对顶部的活度计4固定进行固定,机械臂可以调整完成后,后装机7与活度计4对接,自动完成检测,测量辐射源活度。
37.工作原理,驱动电机303运行带动输出端的主动齿轮302转动,主动齿轮302转动带动底部的从动齿轮107旋转,从动齿轮107旋转带动轴承杆105 转动,轴承杆105旋转带动外侧的第一移动轮106转动,第一移动轮106转动带动设备位移,第一移动轮106推动第二移动轮204跟着转动,方便装置灵活的调整位置,在装置移动的过程中,固定板101对内侧的光学引导系统 103和激光雷达102固定,保证光学引导系统103和激光雷达102平稳运行,光学引导系统103和激光雷达102对前方事物进行识别确认,用于引导装置的运动和自动避障,在避障的过程中,控制电机201根据需要带动输出端的传动杆202转动适当角度,传动杆202转动带动顶端的轴承架203和第二移动轮204调整角度,适当装置可以自动拐弯,实现避障,伺服电机502运行带动输出端的转动杆503转动,转动杆503旋转带动顶端的旋转台601转动,旋转台601转动带动底端的限位滚轮602进行移动,限位滚轮602在引导座 504的引导下移动,带动顶部设备调整角度,旋转台601对顶部的安装架603 进行固定,保证安装架603保持稳定,安装架603对内侧的第一活动杆6支撑,方便第一活动杆6可以调节角度,第一调节电机604运行带动输出端的第一活动杆6转动,使得第一活动杆6调整到合适的角度,同时第二调节电机605转动带动输出端的第二活动杆606进行转动,第二活动杆606调整角度带动顶端的结构移动,同时第三调节电机607运行带动输出端的连接板701 调整角度,连接板701带动顶端的组装架702活动,带动组装架702内侧的后装机7调整角度,第四调节电机703运行带动输出的后装机7调整角度,装置灵活运动,可带动后装机7到达任意位置,可尽可能的靠近施源器,减少额外的辐射,并可缩短源传输时间。
38.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1