手术导航系统的误差检测方法及相关装置与流程
本技术实施例涉及计算机,具体涉及手术导航系统的误差检测方法及相关装置。
背景技术:
1、随着科学技术的不断发展,微创手术的应用越来越广泛。微创手术通过手术导航系统实现患者内部的视觉反馈。在基于光学导航设备的手术导航系统中,先通过ct设备获取患者的ct数据以进行三维重建,然后通过光学测量设备实时采集患者及手术器械在实际空间中的位置,最后通过配准算法将两者对应起来,实时显示患者与手术器械的相对位置关系。
2、正是因为手术导航系统在微创手术中的十分重要,手术导航系统的误差的准确测量不仅是产品安全的保障,还是手术安全的保障。因此,需要一种检测手术导航系统的误差的方法。
技术实现思路
1、本技术实施例提供了一种手术导航系统的误差检测方法及相关装置,本技术利用包括靶点和标记物的检测装置,通过模拟手术整个过程来测量手术导航系统的误差,即对检测装置进行ct扫描、基于标记物进行坐标系配准以及将手术针刺入目标靶点,可以全面且有效地检测手术导航系统的误差。
2、第一方面,本技术实施例提供了一种手术导航系统的误差检测方法,上述手术导航系统包括光学测量设备以及手术针,上述方法包括:
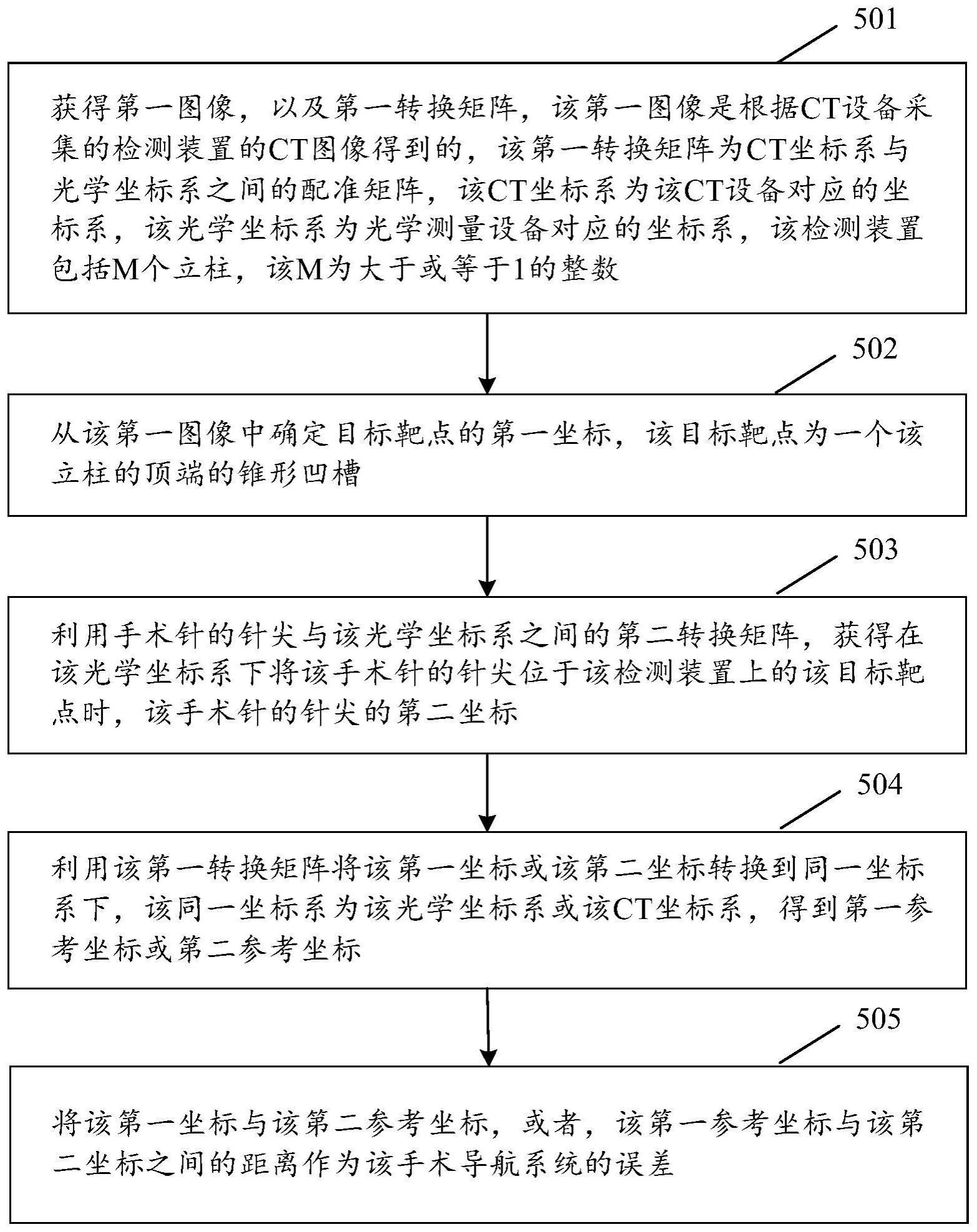
3、获得第一图像,以及第一转换矩阵,上述第一图像是根据计算机断层扫描ct设备采集的检测装置的ct图像得到的,上述第一转换矩阵为ct坐标系与光学坐标系之间的配准矩阵,上述ct坐标系为上述ct设备对应的坐标系,上述光学坐标系为上述光学测量设备对应的坐标系,上述检测装置包括m个立柱,上述m为大于或等于1的整数;
4、从上述第一图像中确定目标靶点的第一坐标,上述目标靶点为一个上述立柱的顶端的锥形凹槽;
5、利用上述手术针的针尖与上述光学坐标系之间的第二转换矩阵,获得在上述光学坐标系下将上述手术针的针尖位于上述检测装置上的上述目标靶点时,上述手术针的针尖的第二坐标;
6、利用上述第一转换矩阵将上述第一坐标或上述第二坐标转换到同一坐标系下,上述同一坐标系为上述光学坐标系或上述ct坐标系,得到第一参考坐标或第二参考坐标;
7、将上述第一坐标与上述第二参考坐标,或者,上述第一参考坐标与上述第二坐标之间的距离作为上述手术导航系统的误差。
8、在一种可能的实施方式中,上述手术导航系统还包括引导器,上述引导器通过连接结构与上述手术针连接,上述利用上述手术针的针尖与上述光学坐标系之间的第二转换矩阵,获得在上述光学坐标系下将上述手术针的针尖位于上述检测装置上的上述目标靶点时,上述手术针的针尖的第二坐标之前,上述方法还包括:
9、根据对上述手术针进行校准得到的第三转换矩阵以及第四转换矩阵得到上述第二转换矩阵,上述第四转换矩阵为将上述手术针的针尖位于上述检测装置上的上述目标靶点时第一坐标系与上述光学坐标系之间的实时转换矩阵,上述第一坐标系是依据上述引导器确定的,上述第三转换矩阵为上述引导器到上述手术针的针尖的转换矩阵。
10、在一种可能的实施方式中,上述手术导航系统还包括校准器,上述校准器包括凹槽,上述根据对上述手术针进行校准得到的第三转换矩阵以及第四转换矩阵得到上述第二转换矩阵之前,上述方法还包括:
11、在上述手术针的针体位于上述凹槽内,且上述校准器、上述手术针以及上述引导器处于静止状态的情况下,依据上述校准器确定第二坐标系;
12、确定上述第一坐标系与上述光学坐标系的第一初始转换矩阵,以及,上述第二坐标系与上述光学坐标系的第二初始转换矩阵;
13、根据上述手术针的针尖在上述第二坐标系的位置、上述第一初始转换矩阵以及上述第二初始转换矩阵得到上述引导器到上述手术针的针尖的上述第三转换矩阵。
14、在一种可能的实施方式中,上述校准器还包括校准孔,上述根据上述手术针的针尖在上述第二坐标系的位置、上述第一初始转换矩阵以及上述第二初始转换矩阵得到上述引导器到上述手术针的针尖的第三转换矩阵之后,上述方法还包括:
15、获取上述校准孔在上述光学坐标系下的第三坐标;
16、利用上述第三转换矩阵以及第五转换矩阵,获得在上述光学坐标系下将上述手术针的针尖位于上述校准孔时,上述手术针的针尖的第四坐标;上述第五转换矩阵为将上述手术针的针尖位于上述校准孔时上述第一坐标系与上述光学坐标系之间的实时转换矩阵;
17、在上述第三坐标与上述第四坐标之间的距离小于或等于第一阈值的情况下,确定上述第三转换矩阵准确。
18、在一种可能的实施方式中,上述检测装置还包括n个第一标记物,上述n为大于或等于3的整数,上述第一图像中包括上述n个第一标记物,上述获得第一转换矩阵包括:
19、从上述第一图像中分割出上述n个第一标记物的n个第五坐标;
20、利用上述光学测量设备获取上述n个第一标记物的n个第六坐标;
21、基于配准算法对上述n个第五坐标和上述n个第六坐标进行配准,得到上述第一转换矩阵。
22、在一种可能的实施方式中,上述从上述第一图像中分割出上述n个第一标记物的n个第五坐标,包括:
23、对上述第一图像进行至少一次高斯差分处理,得到高斯差分处理后的图像,上述高斯差分处理后的图像中上述标记物所在区域的像素点对应的像素值大于其他区域的像素点对应的像素值;
24、对上述高斯差分处理后的图像中像素值大于或等于第二阈值的像素点进行基于像素距离的聚类处理,得到上述n个第五坐标,上述n个第五坐标是基于上述聚类处理得到的聚类中心的坐标得到的。
25、在一种可能的实施方式中,在上述m为大于或等于2的整数的情况下,上述m个立柱中有至少两个立柱的高度不同。
26、第二方面,本技术实施例提供了一种手术导航系统的误差检测装置,上述手术导航系统包括光学测量设备以及手术针,上述装置包括:
27、获得单元,用于获得第一图像,上述第一图像是根据计算机断层扫描ct设备采集的检测装置的ct图像得到的,上述检测装置包括m个立柱,上述m为大于或等于1的整数;
28、上述获得单元,还用于获得第一转换矩阵,上述第一转换矩阵为ct坐标系与光学坐标系之间的配准矩阵,上述ct坐标系为上述ct设备对应的坐标系,上述光学坐标系为上述光学测量设备对应的坐标系;
29、确定单元,用于从上述第一图像中确定目标靶点的第一坐标,上述目标靶点为一个上述立柱的顶端的锥形凹槽;
30、上述获得单元,还用于利用上述手术针的针尖与上述光学坐标系之间的第二转换矩阵,获得在上述光学坐标系下将上述手术针的针尖位于上述检测装置上的上述目标靶点时,上述手术针的针尖的第二坐标;
31、第一处理单元,用于利用上述第一转换矩阵将上述第一坐标或上述第二坐标转换到同一坐标系下,上述同一坐标系为上述光学坐标系或上述ct坐标系,得到第一参考坐标或第二参考坐标;
32、上述确定单元,还用于将上述第一坐标与上述第二参考坐标,或者,上述第一参考坐标与上述第二坐标之间的距离作为上述手术导航系统的误差。
33、在一种可能的实施方式中,上述手术导航系统还包括引导器,上述引导器通过连接结构与上述手术针连接,上述获得单元,还用于根据对上述手术针进行校准得到的第三转换矩阵以及第四转换矩阵得到上述第二转换矩阵,上述第四转换矩阵为将上述手术针的针尖位于上述检测装置上的上述目标靶点时第一坐标系与上述光学坐标系之间的实时转换矩阵,上述第一坐标系是依据上述引导器确定的,上述第三转换矩阵为上述引导器到上述手术针的针尖的转换矩阵。
34、在一种可能的实施方式中,上述手术导航系统还包括校准器,上述校准器包括凹槽,上述确定单元,还用于在上述手术针的针体位于上述凹槽内,且上述校准器、上述手术针以及上述引导器处于静止状态的情况下,依据上述校准器确定第二坐标系;
35、上述确定单元,还用于确定上述第一坐标系与上述光学坐标系的第一初始转换矩阵,以及,上述第二坐标系与上述光学坐标系的第二初始转换矩阵;
36、上述确定单元,还用于根据上述手术针的针尖在上述第二坐标系的位置、上述第一初始转换矩阵以及上述第二初始转换矩阵得到上述引导器到上述手术针的针尖的上述第三转换矩阵。
37、在一种可能的实施方式中,上述校准器还包括校准孔,上述获得单元,还用于获取上述校准孔在上述光学坐标系下的第三坐标;
38、上述获得单元,还用于利用上述第三转换矩阵以及第五转换矩阵,获得在上述光学坐标系下将上述手术针的针尖位于上述校准孔时,上述手术针的针尖的第四坐标;上述第五转换矩阵为将上述手术针的针尖位于上述校准孔时上述第一坐标系与上述光学坐标系之间的实时转换矩阵;
39、上述确定单元,还用于在上述第三坐标与上述第四坐标之间的距离小于或等于第一阈值的情况下,确定上述第三转换矩阵准确。
40、在一种可能的实施方式中,上述检测装置还包括n个第一标记物,上述n为大于或等于3的整数,上述装置还包括分割单元,用于从上述第一图像中分割出上述n个第一标记物的n个第五坐标;
41、上述获得单元,还用于利用上述光学测量设备获取上述n个第一标记物的n个第六坐标;
42、上述获得单元,还用于基于配准算法对上述n个第五坐标和上述n个第六坐标进行配准,得到上述第一转换矩阵。
43、在一种可能的实施方式中,上述装置还包括第二处理单元,用于对上述第一图像进行至少一次高斯差分处理,得到高斯差分处理后的图像,上述高斯差分处理后的图像中上述标记物所在区域的像素点对应的像素值大于其他区域的像素点对应的像素值;
44、上述装置还包括第三处理单元,用于对上述高斯差分处理后的图像中像素值大于或等于第二阈值的像素点进行基于像素距离的聚类处理,得到上述n个第五坐标,上述n个第五坐标是基于上述聚类处理得到的聚类中心的坐标得到的。
45、在一种可能的实施方式中,在上述m为大于或等于2的整数的情况下,上述m个立柱中有至少两个立柱的高度不同。
46、第三方面,本技术实施例提供了一种电子设备,包括:处理器和存储器,其中,该存储器中存储有计算机程序,该处理器调用该存储器中存储的计算机程序,用于执行如第一方面或者第一方面的任意一种可能的实施方式中的方法。
47、第四方面,本技术还提供了另一种电子设备,包括:处理器、发送装置、输入装置、输出装置和存储器,所述存储器用于存储计算机程序代码,所述计算机程序代码包括计算机指令,在所述处理器执行所述计算机指令的情况下,所述电子设备执行如第一方面或者第一方面的任意一种可能的实施方式中的方法。
48、第五方面,本技术实施例提供了一种计算机可读存储介质,该计算机可读存储介质中存储有计算机程序,当该计算机程序在一个或多个处理器上运行时,使得如第一方面或者第一方面的任意一种可能的实施方式中的方法被执行。
49、第六方面,本技术实施例提供了一种计算机程序产品,该计算机程序产品包括程序指令,该程序指令当被处理器执行时使该处理器执行如第一方面或者第一方面的任意一种可能的实施方式中的方法。
- 还没有人留言评论。精彩留言会获得点赞!