一种坐式可变刚度外骨骼及变柔顺性按需辅助控制方法
1.本发明涉及机器人领域,尤其涉及一种坐式可变刚度外骨骼及变柔顺性按需辅助控制方法。
背景技术:
2.随着我国老龄化程度的加剧,由于年龄疾病和肌肉功能退化而引发的下肢运动功能障碍患者日益剧增,其中膝关节运动功能障碍患者最为常见。庞大数量的下肢运动障碍患者给患者个人、家庭和社会造成了沉重的经济和医疗负担。临床医学表明,运动功能障碍患者在经过前期的手术和药物治疗后,长期科学的康复训练治疗,可以帮助患者逐渐恢复运动能力。因此,有必要科学的辅助下肢运动功能障碍患者康复训练。
3.传统的康复训练方法需要多位医师长时间手把手辅助患者进行康复训练,浪费了大量的医疗资源,并且还存在康复效率低下、训练可重复性差、康复训练数据无法记录等问题。外骨骼机器人是一种新型的机器人产物,用机器人代替康复医师的工作,不但减轻了医师的体力消耗,还具有康复训练重复性好、训练模式多样、训练数据可精确记录等优点。因此,开发康复外骨骼机器人及控制算法具有重大的应用价值。
4.现有的康复外骨骼机器人仍有诸多的不足,如驱动器是刚性驱动,安全性较低,容易对使用者造成二次伤害。并且现有的康复外骨骼采用基于位置控制的被动训练方法,或采用基于阻抗控制的主动训练方法,并不能智能的根据患者需求进行合适的训练。因此,需要开发变刚度柔顺驱动的康复外骨骼机器人以保证康复训练的安全,进一步开发按需辅助控制方法,智能的根据患者需求来康复训练,提高患者的主动参与度。
5.在申请号为202110854524.7的中国专利申请中,公开了一种固定式多自由度机械臂减重下肢外骨骼康复机器人,其利用多自由度机械臂来代替现有的固定架,可以实现人体的支撑和减重功能。但是其髋关节和膝关节采用电机直接驱动,关节反向驱动阻抗大,关节无柔顺性,在传感器故障的情况下难以保证患者的安全。
6.在申请号为201910361439.x的中国专利申请中,公开了一种柔索驱动可穿戴式腰下肢康复机器人,其使用柔索驱动,有效地改善了关节出的质量和惯量大的问题,但其驱动的关节刚度不能改变,难以适应不同的康复训练模式,交互性差。
7.在申请号为202011196774.8的中国专利申请中,公开了一种下肢康复机器人的按需辅助自适应控制方法和系统,其根据用户对康复机器人的主动交互力来调整康复机器人的角频率、切向调节速度、法向调节速度和阻尼系数,实现按需辅助。但是其主动力矩的获取依赖传感器,并且人机交互的柔顺性高度依赖于系统控制精度,而并非实际意义上的物理柔顺。
技术实现要素:
8.本发明所要解决的技术问题是针对背景技术的缺陷,提供一种坐式可变刚度外骨骼及变柔顺性按需辅助控制方法,在机械上可以实现主动的柔顺驱动,在控制上根据用户
的需求主动改变交互的柔顺性实现按需辅助康复训练。
9.本发明为解决上述技术问题采用以下技术方案:
10.一种坐式可变刚度外骨骼,其特征在于,包括可移动式支撑架ⅰ机构、变刚度执行器ⅱ、传感系统ⅳ与控制系统ⅲ;
11.所述可移动式支撑架ⅰ机构作为坐式下肢可变刚度外骨骼的基座,用于固定坐式下肢可变刚度外骨骼,包括铝合金型材和万向轮,不同长度的铝合金型材通过角件相互连接,万向轮安装在铝合金型材框架的底部;
12.所述变刚度执行器ⅱ连接有小腿穿戴件,变刚度执行器ⅱ包括与可移动式支撑架ⅰ机构固定连接的关节上臂,所述关节上臂的后端与弓形架固定连接,弓形架的另一端与电机固定盘固定连接;所述电机固定盘与一体化驱动电机的外壳固定连接,所述一体化驱动电机的输出轴与输入盘固定连接,所述输入盘远离电机固定盘一侧与回转支承轴承的外圈固定连接,所述回转支承轴承的远离输入盘一侧的内圈与轴承连接盘固定连接,所述轴承连接盘远离回转支承轴承的一侧与输出盘固定连接;所述输出盘远离轴承连接盘的一侧与扭矩传感器固定连接,所述扭矩传感器远离输出盘的一侧与扭矩传感器输出板固定连接,所述扭矩传感器输出板向下延伸并与下臂板固定连接;
13.所述输入盘面对输出盘一面上沿回转支承轴承旋转中心均匀设有四个输入盘滑轮,所述输入盘滑轮轴向与回转支承轴承轴向平行且围绕在回转支承轴承外围;所述输出盘面对输入盘一面上沿回转支承轴承旋转中心均匀设有四个输出盘滑轮,所述输出盘滑轮轴向与回转支承轴承轴向平行且围绕在回转支承轴承外围;且每个输入盘滑轮与每个输出盘滑轮一一对应,所述输入盘滑轮位于输出盘滑轮外侧;
14.所述变刚度执行器ⅱ还设有一条钢丝绳,所述钢丝绳在每个输出盘滑轮内侧交叉形成绳套并套在输入盘滑轮上;所述变刚度执行器ⅱ上设有拉伸弹簧和刚度调节装置;所述钢丝绳的一端与拉伸弹簧连接,且远离拉伸弹簧的一端与刚度调节装置连接。
15.优选的,所述拉伸弹簧沿小腿板延伸方向同向延伸设置,拉伸弹簧的沿下臂板延伸方向的一端与吊环相连,该吊环的另一端与拉力传感器固定连接,拉力传感器的另一侧与鱼眼轴承固定连接;所述鱼眼轴承通过螺钉铰接在弹簧固定架上,该弹簧固定架设置在下臂板上。
16.优选的,所述刚度调节装置包括涡轮、蜗杆、涡轮支架、涡轮轴、绕线轮、轴承座、轴承座端盖、拉伸弹簧、调刚电机、调刚电机支架;所述调刚电机外壳与调刚电机支架固定连接,所述调刚电机支架底部与下臂板连接;所述调刚电机的输出轴插在拉伸弹簧内部并通过螺钉固定连接,该拉伸弹簧通过两个圆锥滚子轴承对向安装在轴承座上,轴承座远离调刚电机一端设有轴承座端盖,轴承座的底部与下臂板固定连接;所述涡轮与蜗杆配合传动,该涡轮设置在涡轮轴上,涡轮轴通过两个对向安装的法兰轴承安装在小腿板和涡轮支架之间,涡轮支架底部与下臂板固定连接;所述;涡轮通过紧定螺钉与涡轮轴连接,涡轮与蜗杆通过接触传递动力;蜗杆通过紧定螺钉与电机连接轴连接,电机连接轴与轴承座中间设有一对对向安装的角接触球轴承可以相对转动,角接触球轴承内圈与电机连接轴连接,角接触球轴承外圈与轴承座接触;角接触球轴承的内圈轴肩一端通过蜗杆定位,另一端通过圆螺母压紧,角接触球轴承的外圈轴肩一端通过轴承座台阶定位,另一端通过轴承座端盖定位,轴承座端盖与轴承座通过螺钉连接,轴承座通过螺钉固定在下臂板上;调刚电机的输出
轴插在电机连接轴的内部并通过螺钉固定连接,调刚电机的外壳通过螺钉固定在调刚电机支架上,由此改变调刚电机的输出轴角度即可实现弹簧预紧力的调节,从而实现外骨骼关节刚度的调节;调刚电机支架通过螺钉固定在下臂板上;所述涡轮轴上设有绕线轮并通过键传动,钢丝绳缠绕在绕线轮上,并且钢丝绳的末端通过打结的方法固定在绕线轮上。
17.优选的,所述小腿穿戴件安装在下臂板内侧;所示关节上臂设有限位块,限制外骨骼关节运动范围,所述扭矩传感器输出板的中心孔内通过过盈配合安装有磁铁,与所述关节上臂通过螺钉连接有磁传感器架,所述磁传感器架通过胶水粘接,磁编码器芯片用于测量关节旋转角度;
18.所述传感系统ⅳ包括设置于一体化驱动电机内的第一编码器、位于磁传感器架上的第二编码器、与鱼眼轴承相连的拉力传感器、固定在输出盘上的扭矩传感器和贴在以后大腿的表面肌电传感器。
19.优选的,所述第一编码器、第二编码器、拉力传感器和扭矩传感器与下位工控机信号采集端相连;
20.所述控制系统ⅲ包括上位机电脑、下位工控机、一体化驱动电机内部伺服控制器、调刚电机驱动器;所述上位机电脑和下位工控机通过局域网双向通讯,所述一体化驱动电机控制器、调刚电机和下位工控机通过can通讯协议实现双向通讯,所述下位工控机和调刚电机控制器通过can总线双向通讯。
21.优选的,一种用于变刚度外骨骼的变柔顺性按需辅助控制方法,适用于上述所述的一种坐式可变刚度外骨骼,包括以下步骤:
22.步骤s100,获取并执行预设的康复训练任务,所述训练任务包括用户膝关节运动的参考轨迹、可变刚度外骨骼的关节刚度参考轨迹和训练时间;
23.步骤s200,获取用户股内侧肌、股外侧肌、半膜肌、半腱肌的表面肌电信号,并实时估计执行任务过程中用户的主动参与度;
24.步骤s300,根据估计的用户主动参与度自适应的调节外骨骼的关节参考刚度;
25.步骤s400,根据设定的外骨骼关节参考轨迹,对末端外骨骼的关节位置实行开环控制,而对一体化驱动电机的位置进行pid闭环控制,使得系统的柔顺性与外骨骼的物理刚度一致;外骨骼的关节刚度通过闭环pid控制来实现调节;
26.步骤s500,重复步骤s200-s400的步骤直至训练任务完成,实时调整外骨骼与用户的交互刚度,即在用户具有高的参与度时,自适应减小外骨骼的刚度,来提高用户的活动度并降低额外的外骨骼阻力;在用户参与度较低甚至不参与时,自适应增大外骨骼的刚度,来保证外骨骼精确跟踪参考训练轨迹。
27.优选的,根据股内侧肌、股外侧肌、半膜肌、半腱肌的表面肌电信号实时估计用户主动参与度的方法为:
28.步骤s210,将获得的原始表面肌电信号进行滤波处理,依次为全波整流,10hz-500hz带通滤波,410hz高通滤波,50hz陷波滤波和1hz低通滤波;
29.步骤s220,将滤波后的表面肌电信号进行非线性映射,映射公式为:
[0030][0031]
其中a(t)是肌肉的激活程度,u(t)是滤波后的肌电信号,a是非线性形状因子,与
肌肉有关(-3《a《0);
[0032]
步骤s230,根据肌肉激活程度计算用户膝关节的参与度p(t):
[0033]
p(t)=|a1(t)+a2(t)-a3(t)-a4(t)|
ꢀꢀꢀ
(b)
[0034]
其中a1(t)是股内侧肌的激活程度,a2(t)是股外侧肌的激活程度,a3(t)是半膜肌的激活程度,a4(t)是半腱肌的激活程度。
[0035]
优选的,根据估计的用户主动参与度自适应的调节外骨骼的关节刚度方法为:
[0036]
步骤s310,根据用户的参与度,调整外骨骼的关节刚度k(t):
[0037][0038]
其中,k
max
是可变刚度外骨骼关节的最大刚度,k
min
是可变刚度外骨骼关节的最小刚度,p
max
是用户最大参与度。
[0039]
优选的,所述根据设定的外骨骼关节参考轨迹,对外骨骼的关节位置实行开环控制方法为:
[0040]
步骤s410a,通过动力学前馈补偿,将外骨骼关节的参考角度转化为一体化驱动电机的参考角度:
[0041][0042]
其中,ψ
ref
表示一体化驱动电机的参考角度,φ
ref
表示外骨骼关节的参考角度,m表示用户小腿和外骨骼下臂板以及连接在下臂板上零件的总惯量,b表示用户小腿和外骨骼下臂板以及连接在下臂板上零件的总阻尼,g(φ)表示用户小腿和外骨骼下臂板以及连接在下臂板上零件的总重力,是关节角度的一阶导数,是关节角度的二阶导数;
[0043]
步骤s420a,一体化驱动电机在速度控制模式下,使用pid控制器对电机的参考轨迹进行闭环跟踪:
[0044][0045]
其中,u1(t)表示驱动电机的速度控制信号,e1(t)表示驱动电机的位置误差,表示驱动电机位置误差的导数,k
p1
、k
i1
、k
d1
是pid控制器的参数;
[0046]
所述外骨骼的关节刚度通过闭环控制来实现调节方法为:
[0047]
步骤s410b,调刚电机在速度控制模式下,使用pid控制器对外骨骼关节的刚度进行闭环跟踪控制:
[0048][0049]
其中,u2(t)表示调刚电机的速度控制信号,e2(t)表示刚度误差,表示刚度误差的导数,k
p2
、k
i2
、k
d2
是pid控制器的参数。
[0050]
本发明采用以上技术方案与现有技术相比,具有以下有益效果:
[0051]
1.本发明提供的一种坐式变刚度外骨骼及变柔顺性按需辅助控制方法,与传统的坐式外骨骼相比,坐式可变刚度外骨骼的关节刚度可变,且刚度实时可控,使得外骨骼具有更高的安全性和更好的人机交互性能;
[0052]
2.本发明提供的一种坐式变刚度外骨骼及变柔顺性按需辅助控制方法,与传统的康复训练方法相比,变柔顺性按需控制方法可以根据用户的主动参与度,自适应的调节外
骨骼的柔顺性,从而实现被动训练到主动训练方式的自适应,激励了用户训练过程的积极性,挺高了用户的参与度;
[0053]
3.本发明提供的一种坐式变刚度外骨骼及变柔顺性按需辅助控制方法,与传统的变柔顺控制相比,变柔顺性按需辅助控制方法是通过直接控制外骨骼的物理刚度来实现的,控制方法简单,不需要高精度的位置控制,对控制系统的性能要求低;
[0054]
4.本发明提供的一种坐式变刚度外骨骼及变柔顺性按需辅助控制方法,与传统的按需辅助控制方法相比,变柔顺按需辅助控制方法是直接根据用户的表面肌电信号来调整外骨骼柔顺性的,不需要额外的交互力传感器,且对用户的意图识别更为直接准确;
附图说明
[0055]
为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0056]
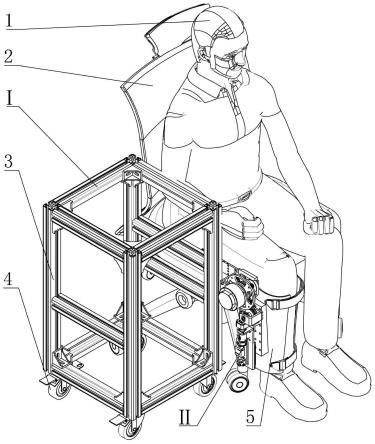
图1是本发明的坐式可变刚度外骨骼穿戴示意图及组成图;
[0057]
图2是本发明的变刚度执行器结构轴测图;
[0058]
图3是本发明的变刚度执行器结构爆炸图;
[0059]
图4是本发明的坐式可变刚度外骨骼传感和控制系统硬件结构图
[0060]
图5是本发明坐式可变刚度外骨骼动力学模型简图;
[0061]
图6是本发明变柔顺辅助控制方法框图;
[0062]
图7是本发明变柔顺辅助控制方法流程图。
[0063]
图中:可移动式支撑架机构ⅰ、变刚度执行器ⅱ、控制系统ⅲ、传感系统ⅳ、用户1、椅子2、铝合金型材3、万向轮4、小腿穿戴件5、关节上臂6、弓形架7、电机固定盘8、一体化驱动电机9、输入盘10、绕线轮11、涡轮12、涡轮支架13、轴承座端盖14、轴承座15、调刚电机支架16、调刚电机17、拉力传感器18、鱼眼轴承19、弹簧固定架20、下臂板21、扭矩传感器22、扭矩传感器输出板23、磁传感器架24、限位块25、轴承连接盘26、回转支承轴承27、吊环28、拉伸弹簧29、电机连接轴30、圆螺母31、角接触球轴承32、蜗杆33、涡轮轴34、输出盘35、输入盘滑轮36、输出盘滑轮37、钢丝绳38、磁编码器39、磁铁40、上位机电脑101、下位工控机102、一体化驱动电机控制器103、调刚电机控制器104、第一编码器105、第二编码器106。
具体实施方式
[0064]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0065]
如图1所示,坐卧式可变刚度外骨骼包括可移动式支撑架机构ⅰ和变刚度执行器ⅱ,变刚度执行器通过螺钉固定在移动式支撑架机构ⅰ的铝合金型材3上;用户1坐在椅子2上,小腿与小腿穿戴件5绑定,以进行膝关节的康复训练。
[0066]
其中,可移动式支撑架机构ⅰ由多根横竖的铝合金型材3和多个万向轮4组成,铝合
金型材3之间通过角件和螺钉固定构成可移动式支撑架机构ⅰ的框架,竖直的铝合金型材3通过螺钉与万向轮4连接,从而实现坐式可变刚度外骨骼的便携式移动。
[0067]
如图2和图3所示,为本发明的变刚度执行器。关节上臂6通过螺钉连接在铝合金型材3上,弓形架7的下端通过螺钉与关节上臂6连接,弓形架7的上端与电机固定盘8通过螺钉连接,电机固定盘8上的孔和螺纹用于定位和连接一体化驱动电机9,一体化驱动电机9的输出轴通过螺钉与输入盘10连接;回转支承轴承27的外圈通过螺钉和输入盘10连接,回转支承轴承27的内圈与轴承连接盘26,而轴承连接盘26外圈螺纹孔用于与输出盘35连接,从而实现输入盘10和输出盘35的相对转动;输出盘35通过螺钉与扭矩传感器22连接,扭矩传感器22的另一面通过螺钉与扭矩传感器输出板23连接;扭矩传感器输出板23的下端通过螺钉与下臂板21连接;磁铁40通过过盈配合安装在扭矩传感器输出板23的中心孔内,磁编码器39与磁传感器架24通过胶水粘接,磁传感器架24与关节上臂6通过螺钉连接,从而测量下臂板21和关节上臂6的相对旋转角度;所述输入盘10面对输出盘35的一面上沿回转支承轴承27的旋转中心采用螺钉固定有四组输入盘滑轮36,输出盘35面对输入盘10的一面沿回转支承轴承27的旋转中心采用螺钉固定有四组输出盘滑轮37,输入盘滑轮36和输出盘滑轮37的轴向与回转支承轴承27的轴向平行,且输入盘滑轮36和输出盘滑轮37一一对应,形成滑轮组,并且输入盘滑轮36位于输出盘滑轮37外侧;输入盘滑轮36和输出盘滑轮37之间通过一根钢丝绳38交叉缠绕传递动力,钢丝绳38的一端与拉伸弹簧29连接,另一端缠绕在绕线轮11上,并通过打结的方式固定在绕线轮11的孔中;所述拉伸弹簧29的另一端钩在吊环28上,吊环28的外螺纹与拉力传感器18的内螺纹配合连接;拉力传感器18的另一端内螺纹与鱼眼轴承19的外螺纹配合连接,鱼眼轴承的旋转孔通过螺钉安装在弹簧固定架20上,弹簧固定架20通过螺钉固定在下臂板21上;
[0068]
所述绕线轮11与涡轮轴34通过键来传递动力和限制其相对转动,涡轮轴34两端设有两个法兰轴承来限制其轴向运动,法兰轴承内圈与涡轮轴34接触并通过涡轮轴34的轴肩定位,一端的法兰轴承外圈与下臂板21接触,另一端的法兰轴承外圈与涡轮支架13接触;涡轮支架13通过螺钉固定在下臂板21上;涡轮12通过紧定螺钉与涡轮轴34连接,涡轮34与蜗杆33通过接触传递动力;蜗杆33通过紧定螺钉与电机连接轴30连接,电机连接轴30与轴承座15中间设有一对对向安装的角接触球轴承32可以相对转动,角接触球轴承32内圈与电机连接轴30连接,角接触球轴承32外圈与轴承座15接触;角接触球轴承32的内圈轴肩一端通过蜗杆33定位,另一端通过圆螺母31压紧,角接触球轴承32的外圈轴肩一端通过轴承座15台阶定位,另一端通过轴承座端盖14定位,轴承端盖与轴承座15通过螺钉连接,轴承座15通过螺钉固定在下臂板21上;调刚电机17的输出轴插在电机连接轴30的内部并通过螺钉固定连接,调刚电机17的外壳通过螺钉固定在调刚电机支架16上,由此改变调刚电机17的输出轴角度即可实现弹簧预紧力的调节,从而实现外骨骼关节刚度的调节;调刚电机支架16通过螺钉固定在下臂板21上。
[0069]
如图4所示,为本发明传感和控制系统硬件结构图,传感和控制系统包括控制系统ⅲ、传感系统ⅳ。控制系统ⅲ包括上位机电脑101、下位工控机102、一体化驱动电机控制器103、调刚电机控制器104;上位机电脑101和下位工控机102通过局域网实现双向通讯,下位工控机102和一体化驱动电机控制器103通过can总线双向通讯,下位工控机102和调刚电机控制器104通过can总线双向通讯;传感系统ⅳ包括第一编码器105、第二编码器107、拉力传
感器106、扭矩传感器108。
[0070]
如图7所示,为变柔顺按需辅助控制的流程图。下面结合流程图对方法步骤做详细介绍:
[0071]
步骤s100,获取并执行预设的康复训练任务,包括用户膝关节运动的参考轨迹、可变刚度外骨骼的关节刚度参考轨迹和训练时间;
[0072]
步骤s200,获取用户股内侧肌、股外侧肌、半膜肌、半腱肌的表面肌电信号,并实时估计执行任务过程中用户的主动参与度;
[0073]
在本发明控制方法中,步骤s210,将原始表面肌电信号进行滤波处理,依次为全波整流、10hz-500hz带通滤波、410hz高通滤波、50hz陷波滤波和1hz低通滤波,滤除外部的干扰信号、肌肉的抖动信号得到表面肌电信号的包络;
[0074]
步骤s220,将滤波后的表面肌电信号进行非线性映射,得到肌肉的激活,映射公式为:
[0075][0076]
其中,a(t)是肌肉的激活程度,u(t)是滤波后的肌电信号,a是非线性形状因子,与肌肉有关(-3《a《0);
[0077]
肌肉的激活程度越高,说明该块肌肉的参与度越高,控制关节运动的肌肉通常由伸肌和屈肌组成,将伸肌和屈肌的激活程度进行合成即可得到用户关节的主动参与度。
[0078]
步骤s230,根据肌肉激活程度计算用户膝关节的主动参与度p(t):
[0079]
p(t)=|a1(t)+a2(t)-a3(t)-a4(t)|
ꢀꢀꢀ
(b)
[0080]
其中a1(t)是股内侧肌的激活程度,a2(t)是股外侧肌的激活程度,a3(t)是半膜肌的激活程度,a4(t)是半腱肌的激活程度;
[0081]
步骤s300,根据估计的用户主动参与度自适应的调节外骨骼的关节参考刚度;
[0082]
在本发明的控制方法中,所述根据用户的主动参与度自适应调节外骨骼关节参考刚度的方法为:
[0083]
步骤s310,根据用户的参与度,调整外骨骼的关节刚度参考刚度k(t):
[0084][0085]
其中,k
max
是可变刚度外骨骼关节的最大刚度,k
min
是可变刚度外骨骼关节的最小刚度,p
max
是用户的最大参与度。外骨骼刚度的调整策略为:当用户参与度增加时,外骨骼关节的参考刚度减小以提供高的柔顺性;当用户的参与度降低时,外骨骼关节的刚度增大以提供高的跟踪精度;此外,k
max
和k
min
根据外骨骼关节的刚度可调范围设置,当k
max
的值与k
min
的值相差较大时,表明外骨骼的关节刚度可调范围大,用户在与外骨骼的交互时,可以从很小的刚度变化到很大的刚度,用户对外骨骼柔顺性变化的感知感更强;当k
max
的值与k
min
的值相差较小时,表面外骨骼关节的刚度变化范围小,用户在与外骨骼的交互时,对外骨骼柔顺性变化的感知较小。p
max
是用户的最大参与度,可以根据用户实际训练过程中的数据设定。
[0086]
步骤s400,根据设定的外骨骼关节参考轨迹,对末端外骨骼的关节位置实现开环控制,而对一体化驱动电机9的位置进行pid闭环位置控制,使得系统的柔顺性于外骨骼的
物理刚度一致;外骨骼的关节刚度通过闭环pid控制来实现调节;
[0087]
在本发明的控制方法中,所述外骨骼关节位置开环控制方法,如图6所示,具体为:
[0088]
步骤s410a,通过动力学前馈补偿,将外骨骼关节的参考角度转化为一体化驱动电机的参考角度:
[0089][0090]
其中,ψ
ref
表示一体化驱动电机9的参考角度,φ
ref
表示外骨骼关节的参考角度,m表示用户1小腿和外骨骼下臂板21以及连接在下臂板21上零件的总惯量,b表示用户1小腿和外骨骼下臂板21以及连接在下臂板21上零件的总阻尼,g(φ)表示用户1小腿和外骨骼下臂板21以及连接在下臂板21上零件的总重力,是关节角度的一阶导数,是关节角度的二阶导数;
[0091]
步骤s420a,一体化驱动电机9在速度模式下,使用pid控制器对电机的参考轨迹进行闭环跟踪控制:
[0092][0093]
其中,u1(t)表示驱动电机的速度控制信号,e1(t)表示驱动电机的位置误差,表示驱动电机位置误差的导数,k
p1
、k
i1
、k
d1
是pid控制器的参数;
[0094]
在本发明的控制方法中,所述外骨骼关节刚度闭环控制方法,如图6所示,具体为:
[0095]
步骤s410b,调刚电机17在速度控制模式下,使用pid控制器对外骨骼关节的刚度进行闭环跟踪控制:
[0096][0097]
其中,u2(t)表示调刚电机17的速度控制信号,e2(t)表示刚度误差,表示刚度误差的导数,k
p2
、k
i2
、k
d2
是pid控制器的参数;
[0098]
步骤s500,重复步骤s200-s400的步骤直至训练任务完成,实时调整外骨骼与用户的交互刚度,即在用户具有高的参与度时,自适应减小外骨骼的刚度,来提高用户的活动度并降低额外的外骨骼阻力;在用户参与度较低甚至不参与时,自适应增大外骨骼的刚度,来保证外骨骼精确跟踪参考训练轨迹;
[0099]
下面详细说明通过改变外骨骼关节刚度来实现用户和外骨骼交互柔顺性改变的原理:
[0100]
如图5所示,为坐式可变刚度外骨骼动力学模型简图,坐式外骨骼输出盘35处的动力学模型可以表示为:
[0101][0102]
其中,m表示用户小腿和外骨骼下臂板21以及连接在下臂板21上零件的总惯量,b表示用户小腿和外骨骼下臂板21以及连接在下臂板21上零件的总阻尼,g(φ)表示用户小腿和外骨骼下臂板21以及连接在下臂板21上零件的总重力,φ表示外骨骼关节角度,是外骨骼关节角度的一阶导数,是外骨骼关节的二阶导数,te是外骨骼的辅助扭矩,th是用户膝关节的主动扭矩;
[0103]
在步骤s400中,由于外骨骼关节的位置是采用开环控制的,所以外骨骼关节的实际位置取决于动力学前馈补偿的精度和一体化驱动电机9的闭环位置控制精度;由于设定的一体化驱动电机9的参考位置未考虑用户膝关节的主动扭矩。因此,在外骨骼关节的参考训练角度为与实际角度存在一定的偏差,这部分偏差即为用户在训练轨迹上的柔顺度,在一体化驱动电机位置可以精确控制的情况下,柔顺度δφ表示为:
[0104][0105]
由于在用户膝关节主动参与度增加时,用户膝关节也表现出大的主动扭矩,外骨骼关节刚度会降低,从而导致柔顺度δφ增大;在用户膝关节主动参与度降低时,用户膝关节也表现出小的主动扭矩,外骨骼关节刚度会增加,从而导致柔顺度δφ减小,保证高的训练精度,由此实现变柔顺的按需辅助控制。这种控制方法的优点在于,它是通过自适应调整外骨骼关节物理刚度来实现变柔顺交互的,可以大大降低控制算法的复杂程度,并且可以调动用户参与康复训练的积极性,增强康复训练的效果。
[0106]
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1