一种方便旋转的粒子加速器治疗系统的制作方法
1.本发明涉及一种方便旋转的粒子加速器治疗系统。
背景技术:
2.粒子加速器治疗就是一种利用电磁加速的原理对质子进行加速,最终通过轰击重金属靶发生韧性辐射,以此为临床上放射治疗提供符合要求的x或e线辐射束,而x或e线对肿瘤细胞具有破坏及增殖抑制的作用,所以“放疗”就是以此达到治疗目的。
3.目前,质子加速器治疗系统一般包括支架、束流引导系统、束流配送系统、束流引导定位系统等,快速运动的质子通过轰击重金属靶发生韧性辐射,产生临床上放射治疗符合要求的x或e线辐射束,经束流引导系统、束流配送系统、束流引导定位系统,配合支架中的治疗床,将射束照射到躲在治疗床上的患者的病灶(肿瘤),实现对患者放疗。
4.为了实现将射束照射到躲在治疗床上的患者的病灶(肿瘤),实现对患者放疗,粒子加速器治疗系统的支架需要在系统主机的控制下,根据束流引导定位系统的指示进行各种运动,使从射束辐射入肿瘤。目前,粒子加速器治疗的支架结构复杂,要求精度高,加工和安装难度高,是构成粒子加速器成本的重要组成部分。
技术实现要素:
5.本发明的目的是提供一种方便旋转的粒子加速器治疗系统,该系统中将粒子加速器的射束偏转引导机构安装在一个旋转支架,结构简单,安装方便。
6.本发明为实现其技术目的所采用的技术方案是:一种方便旋转的粒子加速器治疗系统,设置在一个基座上,包括拼装式旋转支架,在所述的拼装式旋转支架中包括装配粒子加速器治疗系统射束偏转和引导部件的拼装式机架;
7.所述的拼装式旋转支架包括沿射束方向设置的圆盘和圆环,旋转机构主体设置在圆盘和圆环之间;
8.所述的圆盘包括外圆环和设置在外圆环内的内圆盘,所述的内圆盘圆心处设置有供射束通过的第一通孔,内圆盘的圆心外设置有导线通过第二通孔;
9.所述的圆环包括相互由辐条连接的外圆环和内环;
10.在所述的基座前后分别设置有一对支撑圆盘和圆环的支撑轮,所述的支撑轮的轮毂中间内凹形成与所述的圆盘和圆环的外圆环啮合的连接结构;
11.还包括带动所述的圆盘和圆环在所述的支撑轮的轮毂上旋转的旋转驱动机构。
12.进一步的,上述的方便旋转的粒子加速器治疗系统中:所述的旋转机构主体包括设置在所述的圆盘的内圆盘和圆环的内环之间的两组每组两块倾斜立板和倾斜平板;所述的两组块倾斜立板相对于射束所在的水平面平面镜像对称,每组两块倾斜立板相对于射束所在的立面镜像对称,上下两块倾斜立板在靠近圆盘的一端上下相接;所述的两个倾斜平板相对于射束所在的立面和射束所在的水平面镜像对称,其靠近圆盘的一端与同侧的两个倾斜立板连接;所述的分居射束所在的立面两侧的四个倾斜立板的靠近圆环一端的外表面
和两个倾斜平板靠近圆环一端的上下表面分别与分居射束所在水平面上下和射束所在立面两侧的四个与射束平行的斜板连接。
13.进一步的,上述的方便旋转的粒子加速器治疗系统中:所述的支撑轮包括支撑所述的圆盘的两个滚轮机构a和支撑所述的圆环的两个滚轮机构b,所述的滚轮机构a和滚轮机构b具有相同的结构,分别安装在基座前后;
14.每个滚轮机构包括与射束平行外缘加工有弧形凹槽的滚轮,所述滚轮的轴的两端分别设置有轴承,轴承座设置在基座上。
15.进一步的,上述的方便旋转的粒子加速器治疗系统中:所述的旋转驱动机构设置在基座后部的子基座上,包括与圆盘连动的大带轮、大带轮通过皮带与小带轮随动;安装在子基座内的电机a通过转轴带动小带轮。
16.进一步的,上述的方便旋转的粒子加速器治疗系统中:所述的粒子加速器治疗系统射束偏转和引导部件包括:
17.设置在所述的圆盘的内侧的偏转磁铁a;所述的偏转磁铁a为初级偏转磁铁,安装在两个倾斜立板之间靠近圆盘处,两个磁极a相对的表面与射束所在的立面平行,磁轭a与倾斜立板的内侧面连接;
18.设置在所述的圆环的内侧的偏转磁铁b;所述的偏转磁铁b为二级偏转磁铁,安装在两个倾斜立板中上面两个倾斜立板之间,两个磁极b相对的表面与射束所在的立面平行,磁轭b与的两个侧壁与倾斜立板的内侧面连接。
19.进一步的,上述的方便旋转的粒子加速器治疗系统中:在所述的粒子加速器治疗系统射束偏转和引导部件中包括引导射束从偏转磁铁a的磁极之间射进偏转磁铁b的磁极之间的由聚束和导向器件组合形成的机内束流输运装置。
20.进一步的,上述的方便旋转的粒子加速器治疗系统中:在所述的粒子加速器治疗系统射束偏转和引导部件中包括束流配送系统,束流配送系统安装架包括夹在两个倾斜立板的下端的矩形板a和设置在矩形板下安装束流配送系统的倒梯形体。
21.进一步的,上述的方便旋转的粒子加速器治疗系统中:所述的粒子加速器治疗系统射束偏转和引导部件中包括影像引导实时定位系统;所述的影像引导实时定位系统包括两个相对于与射束重合的立面对称的x射线发射器和x射线平板探测器;两个x射线发射器和两个x射线平板探测器与圆环随动。
22.进一步的,上述的方便旋转的粒子加速器治疗系统中:还包括将电源或者信号引入到拼装式旋转支架的引线装置,所述的引线装置包括插入到拼装式旋转支架内的引线筒,固定到基座上的绕线筒,电源线或者信号线多余部分绕在绕线筒,线头经引线筒进入到拼装式旋转支架中。
23.进一步的,上述的方便旋转的粒子加速器治疗系统中:在所述的圆环还设置有安装治疗床的安装台;所述的治疗床包括床板、摆臂a、摆臂b;
24.所述的摆臂b利用回旋轴c安装在所述的安装台实现摆臂b绕回旋轴c的垂直方向的轴旋转的活动连接;
25.所述的摆臂b的末端安装有回旋驱动轴b,所述的摆臂a通过回旋驱动轴b安装在所述的摆臂b的末端,实现所述的摆臂a绕回旋驱动轴b在垂直方向上摆动的连接;
26.所述的摆臂a的末端设置有回旋轴a,所述床板安装在回旋轴a上。
27.本发明公开了一种将粒子加速器治疗系统射束偏转和引导部件的拼装式机架,该机架本身还可以旋转的粒子加速器治疗系统,方便使用。
28.下面结合附图和具体实施例对本发明进行详细地说明。
附图说明
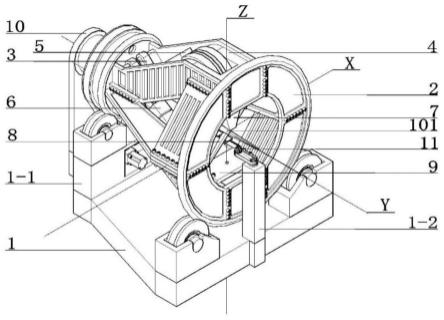
29.图1、一种粒子加速器旋转机架治疗系统总图;
30.图2、拼装式旋转机架总图;
31.图3、拼装式机架爆炸图;
32.图4、螺栓和定位销安装图;
33.图5、支撑轮结构图;
34.图6、旋转驱动机构结构图之一;
35.图7、旋转驱动机构结构图之二;
36.图8、偏转磁铁a结构图;
37.图9、偏转磁铁b结构图;
38.图10、偏转磁铁a和偏转磁铁b偏转射束路线图;
39.图11、机内束流输运段与两个偏转磁铁位置关系图;
40.图12、机内束流输运段空间位置图;
41.图13、发电设备空间位置图;
42.图14、束流配送系统架结构图;
43.图15、影像引导实时定位系统结构图;
44.图16、配重装置结构图;
45.图17、引线装置结构图;
46.图18、治疗床的安装位置图;
47.图19、治疗床的分解图;
48.图20、治疗床板升降示意图;
49.图21、治疗床板自旋和摆动示意图。
50.1、基座、1-1、子基座、1-2、安装台;
51.2、拼装式旋转机架、2-1、拼装式机架、2-1-1、圆盘、2-1-2、圆环、2-1-3、倾斜立板、2-1-4、倾斜平板、2-1-5、斜板、2-1-6、螺栓、2-1-7、定位销、2-2、支撑轮、2-2-1、滚轮机构a、2-2-1-1、滚轮a、2-2-1-2、轴承a、2-2-1-3、轴、2-2-1-4、垫环、2-2-1-5、轴座、2-2-2、滚轮机构b、2-2-2-1、滚轮b、2-3、旋转驱动机构、2-3-1、大带轮、2-3-2、皮带、2-3-3、小带轮、2-3-4、转轴、2-3-5、轴承b、2-3-6、轴承座、2-3-7、电机a、2-3-8、转轴;
52.3、偏转磁铁a、3-1、两个磁极a、3-2、磁轭b;
53.4、偏转磁铁b,4-1、两个磁极b、4-2、磁轭b;
54.5、机内束流输运段;
55.6、发电设备;
56.7、束流配送系统安装架、7-1、矩形板a、7-2、倒梯形体
57.8、影像引导实时定位系统、8-1、x射线发射器、8-2、安装支架a、8-3、x射线平板探测器,8-4、安装支架b;
58.9-1、配重矩形板b、9-2、中空配重矩形体、9-2-1、配重长条体、9-2-2、配重活塞、9-2-3、配重物;
59.10-1、引线筒、10-2、绕线筒、10-3、绕线安装座
60.11、治疗床、11-1、床板、11-2、矩形板c、11-3、矩形板d、11-4、回旋轴a、11-5、t型架a、11-6、电机b、11-7、回旋驱动轴a、11-8、摆臂a、11-9、回旋驱动轴b、11-10、t型架b、11-11、回旋轴b、11-12、摆臂b、11-13、电机c、11-14、回旋轴c、11-15、治疗床底座、11-16、电机d;
61.101、治疗等中心
62.102、射束、102-1、射束a段、102-2、射束b段、102-3、射束c段、102-4、射束d段、102-5、射束e段;
63.103、菱形射束。
具体实施方式
64.在以下的描述中使用一个xyz坐标系统,该坐标系统以治疗等中心101为原点,以z轴为垂直轴的直角坐标系,xy平面是水平面、yz平面是观察者视线的垂直面也称微带所在的立面,xz平面是观察者视线的平行面也称与射束垂直的立面。另外后缀a、b、c等只是表示部件与其它的区别,并不能对该部件进行限制。
65.实施例1,如图1所示,本实施例是一种方便旋转的粒子加速器治疗系统,设置在一个基座1上,包括拼装式旋转支架2,在拼装式旋转支架2中包括装配粒子加速器治疗系统射束偏转和引导部件的拼装式机架2-1;拼装式旋转支架2包括沿射束方向设置的圆盘2-1-1和圆环2-1-2,旋转机构主体设置在圆盘2-1-1和圆环2-1-2之间;圆盘2-1-1包括外圆环和设置在外圆环内的内圆盘,所述的内圆盘圆心处设置有供射束通过的第一通孔,内圆盘的圆心外设置有导线通过第二通孔;圆环2-1-2包括相互由辐条连接的外圆环和内环;在基座1前后分别设置有一对支撑圆盘2-1-1和圆环2-1-2的支撑轮2-2,支撑轮2-2的轮毂中间内凹形成与圆盘2-1-1和圆环2-1-2的外圆环啮合的连接结构;由圆盘2-1-1和圆环2-1-2包围的拼装式机架2-1可以在四个支撑轮2-2上旋转,实现拼装式旋转支架2内粒子加速器治疗系统射束偏转和引导部件绕拼装式机架2-1的中心轴旋转,拼装式机架2-1的中心轴其实就是连接圆盘2-1-1和圆环2-1-2的圆心形成的轴,同时它也是射束的方向,也是y轴的方向。还包括带动圆盘2-1-1和圆环2-1-2在所述的支撑轮2-2的轮毂上旋转的旋转驱动机构2-3。
66.具体的,如图1所示,本实施例中的一种粒子加速器旋转机架治疗系统包括一个基座1,在一个以x轴y轴z轴原点为治疗等中心101以z轴为垂直轴的直角坐标系中,其表面与xy平面平行并处于xy平面的下方,其从z轴方向看到的形状相对于yz平面镜像对称,其沿y轴方向一端的上表面与一个长边与x轴平行上表面与xy平面平行的矩形子基座1-1连接,基座1和子基座1-1共同承载一个旋转轴心与y轴重合的拼装式旋转机架2,在旋转机架2上安装有一个偏转磁铁a3、一个偏转磁铁b4、一个机内束流输运段5、一组发电设备6、一个束流配送系统安装架7、一个影像引导实时定位系统8和一个配重装置9,基座1和旋转机架2共同连接一个引线装置10,在基座1沿y轴方向的另一端的上表面安装一个长边与z轴平行上表面与xy平面平行的矩形安装台b1-2,安装台b1-2的上表面安装一个治疗床11。
67.如图2所示,拼装式旋转机架2包括一个拼装式机架2-1、一个支撑轮2-2和一个旋转驱动机构2-3。
68.如图2和3所示,拼装式机架2-1包括一个轴心线与y轴重合由外环和内盘两部分组成的圆盘2-1-1,其外环较厚,外缘加工成圆弧形状,其内盘较薄,圆心部位加工一个供射束通过的小圆孔,小圆孔的上方加工有共引线装置导线通过的较大的圆孔,相对于圆盘2-1-1沿y轴方向一定距离安置一个轴心线与y轴重合由外环和内环两部分组成的圆环2-1-2,其外环较厚,外缘加工成圆弧形状,其内环较薄。圆盘2-1-1的薄圆盘和圆盘2-1-1的薄圆环之间连接两组每组两个相对y轴倾斜的立板2-1-3和两个相对y轴倾斜的平板2-1-4,两组每组两个倾斜立板2-1-3在拼装式机架2-1未转动的初始状态机下,按上下布置,沿圆盘2-1-1至圆环2-1-2方向相对于xy平面呈一个倾角,且相对于xy平面镜像对称,xy平面上方一组和下方一组的两个倾斜立板2-1-3,每组倾斜立板2-1-3的内表面与yz平面平行并相对于yz平面镜像对称,yz平面一侧的两个上下倾斜立板2-1-3在靠近圆盘2-1-1的一端上下相接,并与圆盘2-1-1的内盘连接,靠近圆环2-1-2的一端与圆环2-1-2的内环连接;两个倾斜平板2-1-4相对于yz平面和xy平面镜像对称,其靠近圆盘2-1-1的一端与同侧的两个倾斜立2-1-3连接,同时与圆盘2-1-1的内盘连接,其靠近圆环2-1-2的一端与圆环2-1-2的内环连接;分居yz平面两侧的四个倾斜立板2-1-3的靠近圆环2-1-2一端的外表面和两个倾斜平板2-1-4靠近圆环2-1-2一端的上下表面分别与分居xy平面上下和yz平面两侧的四个与y轴平行的斜板2-1-5的端面连接。
69.如图4所示,圆盘2-1-1、圆环2-1-2、两组每组两个倾斜立板2-1-3、两个倾斜平板2-1-4和四个斜板2-1-5之间的连接全部由螺栓2-1-6实现,其中,四组螺栓穿过圆盘2-1-1与四个倾斜立板2-1-3的一端连接,四组螺栓穿过圆环2-1-2与四个倾斜立板2-1-3的另一端连接,两组螺栓穿过圆盘2-1-1与两个平板2-1-4的一端连接,两组螺栓穿过圆环2-1-2与两个平板2-1-4的一端连接,四组螺栓穿过加工在两个平板2-1-4靠近圆盘2-1-1一端的与yz平面平行的连接座与两个倾斜立板2-1-3连接,八组螺栓穿过四个斜板2-1-5两端分别与yz平面平行和与xy平面平行的连接座分别与四个倾斜立板2-1-3和两个平板2-1-4连接;定位销2-1-7与螺栓2-1-6间隔排列,无间隙地插进每组螺栓2-1-6连接的两个部件,保证安装精度。定位销2-1-7的外端套有丝扣,可通过丝杆将其拔出。
70.如图5所示,拼装式旋转机架2中的支撑轮2-2包括两个滚轮机构a2-2-1和两个滚轮机构b2-2-2,它们中的两个滚轮机构相对于yz平面镜像对称,两个滚轮机构a2-2-1安装在子基座1-1的上表面,与圆盘2-1-1活动连接;两个滚轮机构b2-2-2安装在子基座1的上表面与圆环2-1-2活动连接,两个滚轮机构a2-2-1的每个滚轮机构包括一个轴心线与y轴平行外缘加工有弧形凹槽的滚轮a2-2-1-1,滚轮a2-2-1-1与圆盘2-1-1活动连接,其弧形凹槽与圆盘2-1-1外缘的弧面吻合,滚轮a2-2-1-1的两侧嵌入两个轴心线与滚轮2-2-1-1轴心线重合的轴承a2-2-1-2,一个轴2-2-1-3穿过两个轴承a2-2-1-2,两个垫环2-2-1-4套在轴2-2-1-3上并与两个轴承a2-2-1-2相接,轴2-2-1-3和两个垫环2-2-1-4嵌入到一个中空上方开口底面与xy平面平行两个内侧面与xz平面平行的轴座2-2-1-5中,并保证两个垫环2-2-1-4的外侧面与轴座2-2-1-5的两个内侧面重合,两个滚轮机构b2-2-2的结构与两个滚轮机构a2-2-1的结构相同,只有尺寸的区别,其滚轮b2-2-2-1与圆环2-1-2活动连接,其弧形凹槽与圆环2-1-2外缘的弧面吻合。
71.如图6和7所示,拼装式旋转机架2中的旋转驱动机构2-3包括一个轴心线与y轴重合的大带轮2-3-1,其延长的圆环与圆盘2-1-1外环的后侧壁连接,大带轮2-3-1的带轮部分
与一个皮带2-3-2活动连接,皮带2-3-2与一个轴心线与y轴平行的小带轮2-3-3活动连接,小带轮2-3-3与一个同轴的转轴2-3-4连接,转轴2-3-4与两个同轴的相隔一定距离的轴承b2-3-5活动连接,两个轴承b2-3-5嵌入到一个与子基座a1-1与xz平面平行的内侧面连接的轴承座2-3-6之中,轴承座2-3-6朝向等中心101的背侧与一个电机a2-3-7连接,电机a2-3-7与转轴2-3-4活动连接,皮带2-3-2的外表面与两个转轴2-3-8活动连接。
72.旋转驱动机构2-3的带动下,圆盘2-1-1和圆环2-1-2可以在滚轮上旋转,实现拼装式机架2-1绕轴旋转,也可以说是绕y轴旋转。本实施例中救出一种皮带轮带动圆盘2-1-1旋转的旋转驱动机构2-3,实践中还可以有其它驱动方式,如在滚轮上加一个动力使滚轮可以旋转,此时,增加滚轮和圆盘2-1-1或者圆环2-1-2外沿之间的摩擦力就可以带动拼装式机架2-1旋转了。
73.下面对安装在拼装式机架2-1内的机构进行说明。
74.如图8所示,偏转磁铁a3为初级偏转磁铁,位于靠近圆盘2-1-1的一端,安装在两组每组两个倾斜立板2-1-3之间,其两个磁极a3-1相对的表面与yz平面平行,并相对于yz平面镜像对称,其磁轭a3-2与x轴垂直的两个侧壁与两组每组两个倾斜立板2-1-3的内侧面连接。
75.如图9所示,偏转磁铁b4为二级偏转磁铁,位于靠近圆环2-1-2的一端,安装在两组每组两个倾斜立板2-1-3中上面两个倾斜立板之间,其两个磁极b4-1相对的表面与yz平面平行,并相对于yz平面镜像对称,其磁轭b4-2与x轴垂直的两个侧壁与上方两个倾斜立板2-1-3的内侧面连接。
76.如图10所示,偏转磁铁a3和偏转磁铁b4的组合偏转角度为2倍x
°
加90
°
,偏转磁铁a3负责将与y轴重合的射束102上扬x
°
,然后偏转磁铁b4再将射束102偏转x
°
加90
°
,使射束102与z轴重合,并交于等中心101。
77.图10演示的是射束102的路径,分为5段,分别是将要射入磁极a的射束a段102-1、经磁极a3-1偏转的射束b段102-2、从磁极a3-1射出的射束c段102-3、经磁极b4-1偏转的射束d段102-4和从磁极b4-1射出的射束e段102-5,射束e段102-5与等中心101相交。
78.如图11和图12所示,机内束流输运段5是一系列聚束和导向器件的组合,用一个长方体代替其所占空间位置,长方体两端方形面的几何中心与偏转磁铁a3射出的射束c段102-3的轴心线重合,代表机内束流输运段5中的系列聚束和导向器件的轴心线与偏转磁铁a3射出的射束c段102-3的轴心线重合。所有聚束和导向器件各自以适当方式与上方两个倾斜立板2-1-3的内侧面连接。
79.如图13所示,拼装式旋转机架2中还有发电设备6,发电设备6是为偏转磁铁a3、偏转磁铁b4和机内束流输运段5中的聚束和导向器件提供动力的发电设备的组合,用多个方体代替其所占空间位置,这些发电设备各自以适当方式与下方两个倾斜立板2-1-3的内侧面连接。
80.如图14所示,束流配送系统安装架7包括一个表面与z轴垂直长边与x轴平行的矩形板a7-1和一个中空的两个立面与y轴垂直两个斜面与y轴平行底面与z轴垂直的倒梯形体7-2,矩形板a7-1的上表面与上方两个倾斜立板2-1-3的下端面连接,倒梯形体7-2的上表面与矩形板a7-1的下表面连接,从z轴方向看,倒梯形体7-2的几何中心与z轴重合,从y轴方向看,梯形体7-2的形状相对于yz平面镜像对称。倒梯形体7-2中可安置多种样式的束流配送
系统。
81.如图15所示,影像引导实时定位系统8包括两个x射线发射器8-1、两个x射线发射器安装支架a8-2、两个x射线平板探测器8-3和两个x射线平板探测器安装支架b8-4,安装支架a8-2位于xy平面下方,与圆环2-1-2薄圆环部分的背侧连接,两个x射线发射器8-1分别安装在两个安装支架a8-2上,两个x射线发射器8-1相对于yz平面镜像对称;安装支架b8-4分别与束流配送系统安装架7中倒梯形体7-2的两个斜面连接,两个x射线平板探测器8-3分别安装在两个安装支架b8-4上,两个x射线平板探测器8-3相对于yz平面镜像对称;居于yz平面一侧的x射线发射器8-1与居于yz平面另一侧的x射线平板探测器8-3组成一个x光机,从x射线发射器8-1发出的射束由加工在两个安装支架a8-2上的梯形孔约束成菱形射束103,两个菱形射束103的轴心线垂直相较于等中心101,与xz平面重合,相对于yz平面呈45
°
角。
82.由于两个x射线发射器8-1和两个x射线平板探测器8-3与圆环2-1-2随动,可在治疗过程中随时校准患者的体位,故称为影像引导实时定位系统。
83.本实施例中,影像引导实时定位系统8实际上就是目前常用的系统,这里将其安装在圆环2-1-2,圆环2-1-2实际上就是影像引导实时定位系统8的安装支架。
84.如图16所示,拼装式旋转机架2上安装的配重装置9包括两个表面与z轴垂直两个边与x轴平行的配重矩形板b9-1和一个中空配重矩形体9-2,两个配重矩形板b9-1与靠近圆环2-1-2的下方两个倾斜立板2-1-3的上下端面连接,中空配重矩形体9-2的上下表面与两个配重矩形板b9-1的下上表面连接,左右表面与下方两个倾斜立板2-1-3的内侧面连接,中空配重矩形体9-2与x轴垂直的两个内侧壁加工有若干与y轴平行的配重长条体9-2-1,配重矩形体9-2与z轴垂直的上下面和两个配重矩形板b9-1的表面加工有同心的小通孔,并分别用两个配重活塞9-2-2封堵,中空配重矩形体9-2内注入铅水凝固后形成配重物9-2-3。铅水不一定充满中空配重矩形体9-2,视配重需要而定。加热的铅水凝固后会收缩,为防止其上下串动,故增加了一些配重长条体9-2-1。上端的配重活塞9-2-2用于注入铅水,上端的配重活塞9-2-2用于放出铅水,局部加热即可实现。
85.引线装置是将电源线和信号线引入到拼装式旋转机架2内的装置,利用引线装置可以使现场简洁,方便维护,引线装置如图17所示,包括一个轴心线与y轴平行的引线筒10-1、一个轴心线与y轴重合的绕线筒10-2和一个绕线筒安装座10-3,引线筒10-1的一端与圆盘2-1-1薄盘部分的外侧连接,其圆心与圆盘2-1-1上方加工的通孔圆心重合,另一端悬于绕线筒10-2之上,绕线筒10-2远离圆盘2-1-1的一端与绕线筒安装座10-3连接,绕线筒安装座10-3与基座1的上表面连接。绕线筒10-2的内径足够大,其内的空间还可以安置引入射束的机外束流输运段,这个束流输运段也可与圆盘2-1-1连接。
86.如图18所示,治疗床11安装在安装台1-2的上表面。如图19所示,治疗床11包括一个长形床板11-1,床板11-1长边约1/3处嵌入一个两个边与床板11-1长边平行的矩形板c11-2,并使矩形板c11-2的上表面与床板11-1的上表面齐平,床板11-1的下表面连接一个两个边与床板11-1长边平行的矩形板d11-3,并使矩形板d11-3与矩形板c11-2上下对齐,两个矩形板通过螺栓实现连接,矩形板d11-3的下表面与一个轴心线与矩形板d11-3的下表面垂直的回旋轴a11-4的内环连接,回旋轴a11-4的外环与一个上端为圆面下端为与z轴平行的立面的t型架a11-5的圆面上表面连接,t型架a11-5的圆面上表面与一个电机b11-6连接,电机b11-6居于回旋轴a11-4的内环之中,与矩形板d11-3活动连接,t型架a11-5立面的一个
侧面与一个轴心线与z轴垂直的回旋驱动轴a11-7的底座连接,回旋驱动轴a11-7的外环与一个侧壁与z轴平行的摆臂a11-8的一端连接,摆臂a11-8的另一端与一个轴心线与z轴垂直的回旋驱动轴b11-9的外环连接,回旋驱动轴b11-9的底座与一个下端为与z轴垂直的圆面上端为与z轴平行的立面的t型架b11-10的侧面连接,t型架b11-10的圆面下表面与一个轴心线与z轴平行的回旋轴b11-11的内环连接,回旋轴b11-11的外环与一个表面与z轴垂直的摆臂b11-12一端的上方沉孔的下底面连接,摆臂b11-12上方沉孔的底面与一个电机c11-13连接,电机c11-13居于回旋轴b11-10的内环之中,与t型架b11-10的圆面活动连接,摆臂b11-12另一端下方沉孔的上底面与一个轴心线与z轴平行的回旋轴c11-14的内环连接,回旋轴c11-14的外环与治疗床底座11-15的上表面连接,治疗床底座11-15的上表面与一个电机d11-16连接,电机d11-16居于回旋轴c11-14当中,与摆臂b11-12下方沉孔的上底面活动连接,治疗床底座11-15的下表面与矩形子基座b1-2的上表面连接。
87.如图20所示,回旋驱动轴a11-7和回旋驱动轴b11-9同角度反向旋转,可驱动床板11-1升降,回旋驱动轴a11-7还可单独调整床板11-1相对于xy平面的角度,可以校正由于床板11-1承载患者而产生的床面弯曲。回旋驱动轴a11-7和回旋驱动轴b11-9自带涡轮蜗杆式驱动机构,可实现自锁,在电机不通电的情况下,可维持摆臂a11-8的摆动角度不变。
88.如图21所示,回旋轴a11-4、回旋驱动轴b11-9和回旋轴c11-14的共同作用可以使床板11-1自旋和摆动。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1