一种具有多点位自解锁的单驱型胶囊式活检装置
1.本发明涉及医疗器械技术领域,尤其是涉及一种具有多点位自解锁的单驱型胶囊式活检装置。
背景技术:
2.胃肠道疾病作为临床上的常见病,其潜伏周期长,早期症状不明显,严重影响着人们的身体健康和精神健康,其患病率高达74%。由于人体的胃肠道长为8~10米,又由于胃肠道内的疾病隐蔽,难以发现,所以,尽早地发现,并在早期采取治疗是成功治疗胃肠道疾病的关键。目前在临床上,诊查胃肠道疾病的主要设备是传统的插管式内窥镜。作为一种侵入式的诊断检查的方式,传统的内窥镜在诊断过程中会给患者带来痛苦,并且可能会带来一系列的并发症。现阶段,传统的插管式内窥镜已出现了相应的诊查代替方案,例如钡剂灌肠和大便隐血,但这两种代替方案的误检率较高,诊查有效性低。主动运动式的胶囊机器人的成功研制使得患者可通过吞服胶囊机器人进入人体进行活检,精准钳取所需组织成为可能,从而为医生采集相关病理组织,对病灶类型做出准确的诊断,确诊疾病,实现消化道疾病的早发现早治疗,以便对症治疗,提高治疗效果,其不仅操作简便,且属于微创式诊疗方法,大大减轻病人在胃肠道疾病诊断时的不适。因此实现具有活检功能的胶囊机器人,是临床亟需解决的关键技术之一。然而,现有活检功能的胶囊机器人多为一次性活检功能,当人体多个部位或同一部位多处需采样时,需再次吞服,不仅效率低下,而且成本高、时间长,多有不便。因此,迫切需要提出一种一次吞服就具有多次取样功能的胶囊活检机器人,以解决上述问题。
技术实现要素:
3.本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种具有多点位自解锁的单驱型胶囊式活检装置。
4.本发明的目的可以通过以下技术方案来实现:
5.一种具有多点位自解锁的单驱型胶囊式活检装置,该装置包括胶囊状且设有透明罩的外壳,以及设于外壳内的单向驱动机构、异位自解锁机构、摄像系统和接样盒,所述单向驱动机构与所述异位自解锁机构连接,所述摄像系统设于所述异位自解锁机构旁,并置于透明罩中,所述接样盒设于所述异位自解锁机构下方。
6.进一步地,所述单向驱动机构包括设于外壳内的电机,与电机的一端连接的桨轮装置,与电机的另一端连接的联轴器,与所述联轴器连接的丝杆,以及与丝杆活动连接的丝杆螺母,所述丝杆螺母连接所述异位自解锁机构。
7.进一步地,所述异位自解锁机构包括锁座,设置在锁座上的导杆、锁条,与导杆连接的钳座,固定在钳座下方的可动锁牙,与钳座活动连接的取样钳,以及固定在丝杆螺母上并与取样钳通过连杆连接的多功能解锁板,所述锁条与所述可动锁牙啮合,所述可动锁牙与所述多功能解锁板对应设置。
8.进一步地,所述可动锁牙包括牙座和扭簧,所述牙座上设有簧槽、转动孔及齿头,在自由状态下的可动锁牙的齿头与锁条上的牙齿啮合并锁定,所述牙座、所述扭簧通过转动孔与钳座连接。
9.进一步地,所述钳座的外侧面设有用以与导杆形成移动副活动相连接的导块,所述钳座的内侧设有用以安装可动锁牙的安装轴,所述钳座的顶部中央设有钳孔,可动锁牙的牙座与扭簧通过转动孔活动连接在所述安装轴上,并隐藏在簧槽内。
10.进一步地,所述多功能解锁板包括定位板、安装孔、连板及翼板,所述安装孔与连杆连接,所述连板与丝杆螺母连接,所述翼板上设有与可动锁牙对应设置的阶梯台阶,所述阶梯台阶包括依次设置的前拉台阶、前解锁档、前导向面、中空档、后导向面、后解锁档以及后推台阶。
11.进一步地,所述取样钳的一端设有钳头,另一端设有用以与所述连杆转动连接的驱动孔,所述取样钳的中部设有用以与所述钳孔活动连接的腮孔。
12.进一步地,所述外壳的内侧设有实现密封的横隔板,所述电机固定在所述横隔板的一侧,所述横隔板的另一侧设有线圈。
13.进一步地,所述桨轮装置包括驱动螺旋桨、连桨轮、传动齿轮组和驱桨轮,所述驱动螺旋桨与连桨轮固定连接,所述传动齿轮组的一端与连桨轮齿轮啮合连接,另一端与驱桨轮齿轮啮合连接,所述驱桨轮固定在电机的转轴上。
14.进一步地,所述摄像系统包括设于外壳内的座板以及设置在座板上的摄像头和照明灯,所述座板位于透明罩内,并与透明罩形成用以容纳摄像头和照明灯的封闭空间。
15.本发明提供的具有多点位自解锁的单驱型胶囊式活检装置,相较于现有技术至少包括如下有益效果:
16.1)本发明设置单个电机驱动,利用异位自解锁机构自身携带的解锁板在不同位置完成解锁及锁定,从而自我间歇控制实现胶囊式活检机构伸出取样、缩入留样、张开卸样的活检功能,以满足患者一次性吞服下对人体多部位、多次数的取样操作功能,降低了控制难度和机构复杂度,其利用机械结构自身的位置解锁,保障了机构运行的可靠性,不会因多次循环产生累积误差。
17.2)本发明各机构均集成在上半壳、下半壳构成的容置空间内容,且只利用了单个电机驱动便能完成一次性吞服多次取样的操作,无需外加多余的电机驱动以及其他辅助设备,减小了胶囊体积和重量,使得机构更加小巧、高效。
附图说明
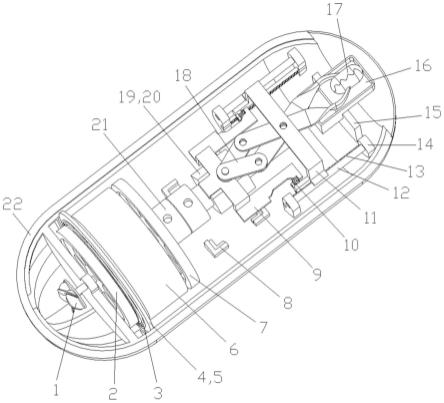
18.图1为实施例提供的本发明具有多点位自解锁的单驱型胶囊式活检装置的整体结构示意图;
19.图2为实施例提供的本发明的分解结构示意图;
20.图3为实施例提供的本发明中的异位自解锁机构的结构示意图;
21.图4为实施例提供的本发明中异位自解锁机构的部分部件安装在下半壳上的结构示意图;
22.图5为实施例提供的本发明中的驱动螺旋桨的传动结构示意图;
23.图6为实施例提供的具本发明中的多功能解锁板的结构示意图;
24.图7为实施例提供的本发明中的可动锁牙的分解结构示意图;
25.图8为实施例提供的本发明中的钳座的结构示意图;
26.图9为实施例提供的本发明的可动锁牙在自由状态下与锁条啮合锁定的结构示意图;
27.图10为实施例提供的本发明的异位自解锁机构中的多功能解锁板与可动锁牙的位置示意图;
28.图11为实施例中本发明初始状态即取样钳缩入并闭合时的状态示意图;
29.图12为实施例中本发明中的取样钳原地张开时的状态示意图;
30.图13为实施例中本发明中的取样钳开始伸出时的状态示意图;
31.图14为实施例中本发明中的取样钳完全伸出开始闭合取样时的状态示意图;
32.图15为实施例中本发明中的取样钳取样结束后开始缩入时的状态示意图;
33.图16为实施例中本发明中的摄像系统的结构示意图;
34.图17为实施例中本发明中的导槽的结构示意图;
35.图18为实施例中本发明中的毛刷的结构示意图;
36.图19为实施例中本发明中的单开盖的结构示意图;
37.图中标号所示:
38.1为驱动螺旋桨;2为连桨轮;3为线圈;4为横隔板;5为传动齿轮组;6为电机;7为驱桨轮;8为电控座;
39.9为多功能解锁板,901为安装孔,902为连板,903为定位板,904为翼板, 9041为后推台阶,9042为后解锁档,9043为后导向面,9044为中空档,9045为前导向面,9046为前解锁档,9047为前拉台阶;
40.10为可动锁牙,1001为牙座,10011簧槽,10012为转动孔,10013为齿头, 1002为扭簧;
41.11为钳座,1101为钳孔,1102为安装轴,1103为导块;
42.12为导杆;13为锁条;14为锁座;
43.15为摄像系统,1501为摄像头,1502为座板,1503为照明灯;
44.16为接样盒,1601为单开盖;
45.17为取样钳,1701为驱动孔,1702为腮孔,1703为钳头;
46.18为连杆;19为丝杆螺母;20为丝杆;21为联轴器;
47.22为外壳,2201为栅格,2202为齿轮座,2203为透明罩,2204为柔性罩, 2205为导槽;23为毛刷。
具体实施方式
48.下面结合附图和具体实施例对本发明进行详细说明。显然,所描述的实施例是本发明的一部分实施例,而不是全部实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都应属于本发明保护的范围。
49.实施例
50.如图1、3、16所示,配合参见图2、图4、图5,本发明涉及一种具有多点位自解锁的单驱型胶囊式活检装置,该装置包括外壳22,线圈3,横隔板4,驱动螺旋桨1,连桨轮2,传动齿
轮组5,电控座8,驱桨轮7,电机6、联轴器21,丝杆螺母19,丝杆20,摄像系统15、接样盒16,及异位自解锁机构。
51.外壳22整体为胶囊状,包括形状、体积相同的相互拼接的上半壳和下半壳,各半壳的纵向截面为胶囊截面的椭圆形,横向截面为半圆形。外壳22的尾部设有栅格2201,即栅格2201设置在上半壳和下半壳的尾部。上半壳的头部设有柔性罩 2204,柔性罩2204可以为一定硬度的多个薄塑料片依次连接组成,覆盖在上半壳的头部,用于阻挡人体软组织进入胶囊式活检装置的内部。下半壳的头部设有透明罩2203,以便摄像系统15对人体病患部位进行摄像时防止摄像头受污影响摄像效果;下半壳的内部设有齿轮座2202及电控座8,电控座8用于安装电控元件或电路板,电控元件或电路板用于控制电机6及控制摄像系统15采集并传输图像,上半壳和下半壳设有相互配合的用于连接的止口。上半壳与下半壳构成的容置空间内设置驱动螺旋桨1,连桨轮2,传动齿轮组5,驱桨轮7,联轴器21,丝杆螺母19,丝杆20,摄像系统15及异位自解锁机构。
52.参见图4,横隔板4有两个,横隔板4固定在外壳22的内侧,具体设置在下半壳的内侧,其中一个横隔板4靠近下半壳的尾部,且横隔板4的一面上固定有电机6,另一面上固定线圈3,线圈3用于接收外部能量,为电机6供电。当上半壳和下半壳通过止口配合时,两个横隔板4与上半壳、下半壳组合在一起起到舱室密封的作用,用于密封电机6不受外环境影响;另一个横隔板4位于电机6的前部,两个横隔板4形成密封舱,用于保护电机6不受人体体内潮湿环境的影响。
53.本发明的驱动螺旋桨1与连桨轮2固定连接,连桨轮2通过传动齿轮组5连接驱桨轮7。具体地,传动齿轮组5安装在齿轮座2202上,传动齿轮组5的一端与连桨轮2齿轮啮合连接,另一端与驱桨轮7齿轮啮合连接,驱桨轮7固定在电机6 的转轴上,从而使得电机6转轴转动可驱动螺旋桨1做旋转运动。电机6的转轴的另一端连接联轴器21。
54.本发明的联轴器21的一端与电机6固定连接,另一端与丝杆20固定连接;丝杆螺母19通过螺纹副与丝杆20活动相连。
55.本发明的摄像系统15包括座板1502以及设置在座板1502上的摄像头1501 和照明灯1503,摄像系统15固定在下半壳内靠近头部的位置,并位于透明罩2203 的里面,受透明罩2203保护;座板1502与透明罩2203形成封闭空间(未画出),从而保护摄像头1501及照明灯1503免受人体内环境污染。摄像系统15用于胃肠内的图像监控摄取。
56.参见图3、图6、图7、图8,配合参见图2、图9~图15。异位自解锁机构包括多功能解锁板9、可动锁牙10、锁条13、锁座14、导杆12、钳座11、取样钳 17和连杆18。异位自解锁机构通过锁座14安装在下半壳内部。上述部件依次连接,组成胶囊式活检装置。在本实施例中,锁条13、导杆12、及锁座14设有左右对称的两组;即两个锁座14对称设置,异位自解锁机构中的锁条13、导杆12均固定锁座14上,导杆12上连接有钳座11,钳座11的下方固定连接可动锁牙10。
57.异位自解锁机构中的可动锁牙10包括牙座1001及扭簧1002,牙座1001上设有簧槽10011、转动孔10012及齿头10013。可动锁牙10在自由状态下,其齿头 10013与锁条13上的牙齿啮合并锁定,从而自由状态下可动锁牙10也把与之相连的钳座11锁定在导杆12上。钳座11左右对称,两侧分别连接两个导杆12。钳座 11的外侧面设有左右对称的导块1103,内侧面设有安装轴1102,钳座11的顶部中央设有钳孔1101,钳座11外侧通过导块1103与导杆
12形成移动副活动相连接,钳座11内侧安装轴1102上设有可动锁牙10,可动锁牙10的牙座1001与扭簧1002 通过转动孔10012活动连接在钳座11的安装轴1102上,隐藏在簧槽10011内。
58.参考图6,异位自解锁机构中的多功能解锁板9包括定位板903、安装孔901、连板902及左右对称的翼板904;定位板903位于解锁板9的后端,并与连板902 相垂直,定位板903紧贴在丝杆螺母19的端头,用于精确定位多功能解锁板9与丝杆螺母19的位置,进而精确确定多功能解锁板9在外壳22的前后位置;连板 902位于解锁板9的上端,水平放置,连板902安装在丝杆螺母19的上端面;翼板904位于解锁板9的两边,具体设于连板902的连段,并与连板902固定相连并向前伸出,每个翼板904上设有朝外的阶梯台阶:阶梯台阶包括了前拉台阶9047、后推台阶9041、前导向面9045、后导向面9043、中空档9044和前解锁档9046、后解锁档9042,前拉台阶9047、前解锁档9046、前导向面9045、中空档9044、后导向面9043、后解锁档9042以及后推台阶9041依次设置,使得整个阶梯台阶呈现多角度变化凹坑状。作为优选方案,前拉台阶9047、前解锁档9046、前导向面9045与后导向面9043、后解锁档9042以及后推台阶9041为对称设置。多功能解锁板9固定在丝杆螺母19上,翼板904上的阶梯台阶与可动锁牙10对应设置。
59.异位自解锁机构中的取样钳17设有左右对称的两个,取样钳17的头部设有钳头1703,中间设有腮孔1702,后端设有驱动孔1701,取样钳17通过腮孔1702铰接在钳座11的钳孔1101上。
60.异位自解锁机构中的连杆18也设有左右对称的两个,与取样钳17相对应,两个连杆18的一端分别通过驱动孔1701的配合作用与两个取样钳17转动连接,另一端均通过安装孔901的配合作用与多功能解锁板9可转动相连。因多功能解锁板 9固定在丝杆螺母19上,故两个连杆18可相对丝杆螺母19转动,从而当电机6 驱动丝杆螺母19前后移动时,异位自解锁机构中的多功能解锁板9通过翼板904 上的阶梯台阶顺序按压可动锁牙10的牙座1001间歇接触以控制可动锁牙10对锁条13的锁定和解锁及推动锁牙10,从而控制可动锁牙10在锁条13上的前后位置,及控制钳座11在导杆12上的前后位置,进而改变异位自解锁机构自身构型产生位移或构型变化,以最终实现异位自解锁机构中的取样钳17在不同位置上做移动或张开、闭合的张合运动。
61.本发明的接样盒16固定在下半壳内,且位于异位自解锁机构中的取样钳17 下方。参见图19,接样盒16上还设有单开盖1601,单开盖1601仅可单向打开,以方便所取人体组织试样落入又具有阻止人体组织外溢出的作用。单开盖1601可采用具有一定单向柔度和弹性的挠性塑料薄片实现。
62.进一步地,参见图17,本发明还包括导槽2205,该导槽2205与丝杆螺母19 滑动配合,可限制丝杆螺母19仅能沿外壳22前后向直线移动,不能绕丝杆螺母 19自身轴线旋转。本发明的导块1103安装在导杆12上,从而钳座11不能转动,进而与之相连的连杆18、丝杆螺母19也不能转动。但为了进一步约束丝杆螺母19 的自传,防止本发明中的异位自解锁机构因受力不均产生非对称构型变化,所以添加了导槽2205。
63.参见图18,本发明还包括毛刷23,毛刷23具有一定的弹性,毛刷23设置在接样盒16正上方的上半壳上,毛刷23头部指向下半壳,且位于取样钳17的钳头必经之地,以防取样钳17所取人体组织因黏连未掉入接样盒16。
64.进一步地,作为优选方案,本发明中的联轴器21还可为微型磁粉离合器,当磁粉离合器处于离状态时,电机6不能驱动丝杆20转动,仅用于带动驱动螺旋桨 1旋转运动以驱动胶囊运动变位,而不进行取样操作;当磁粉离合器通电处于合状态时,则可同时驱动丝杆20及驱动螺旋桨1运动,此时运动可给取样钳17的取样提供推助力,阻止取样钳17打滑而胶囊后退,使得取样钳17更易于抓到人体组织。
65.本发明中的异位自解锁机构在不同位置自我解锁,控制其多功能解锁板9对可动锁牙10锁定和解锁的过程如下:
66.步骤一、如图11所示,本发明中的异位自解锁机构处在初始状态,此时其内的取样钳17钳头1703闭合并处在胶囊(上半壳和下半壳形成的空间)内。
67.步骤二、如图12所示,配合参见图6、图7,本发明中的异位自解锁机构产生变形,取样钳17原地不动、钳头张开:即当电机6正转,通过联轴器21驱动丝杆 20转动,从而丝杆螺母19向前移动,此时因多功能解锁板9与牙座1001之间的摩擦力很微小,故多功能解锁板9前移造成可动锁牙10的牙座1001脱离前解锁档 9046进入中空档9044,从而可动锁牙10将锁定在锁条13上,从而使得钳座11 锁定在导杆12上不动,丝杆螺母19将推动异位自解锁机构变形,进而推动取样钳 17的钳头1703张开,此时如果钳头中已有上次所取人体组织样品,将被卸样到接样盒16中。
68.步骤三、如图13所示,配合参见图6、图7,本发明中的异位自解锁机构将停止变形以准备推出胶囊外:即电机6继续正转,多功能解锁板9继续前移,因可动锁牙10锁在锁条13上不动,致使多功能解锁板9的后导向面9043与可动锁牙10 的牙座1001接触,从而驱动牙座1001上的齿头10013与锁条13脱离,牙座1001 停留在后解锁档9042上齿头10013与锁条13彻底脱离,当后推台阶9041碰到牙座1001时,多功能解锁板9将推动与牙座1001连接的钳座11一起向前移动;此时异位自解锁机构将停止变形,多功能解锁板9开始推动整个异位自解锁机构(除导杆12外)向外伸出胶囊。
69.步骤四、如图14所示,配合参见图6、图7,本发明异位自解锁机构中的取样钳17已伸出胶囊外,异位自解锁机构将再次开始变形以闭合取样取样钳17对人体组织进行取样:即当取样钳17伸出胶囊外并对准患者胃肠内的患部之后,电机6 开始反转,多功能解锁板9后移,同样因多功能解锁板9与牙座1001之间的摩擦力很微小,可动锁牙10的牙座1001将脱离后解锁档9042进入中空档9044,从而可动锁牙10再次锁定在锁条13上,从而使得与之相连的钳座11锁定,丝杆螺母 19将拉动异位自解锁机构变形,进而拉动取样钳17的钳头1703闭合进行取样,此过程摄像系统15中的摄像头1501在照明灯1503的照明下将对患部进行图像的实时监控。
70.步骤五、如图15所示,本发明异位自解锁机构中的取样钳17取样结束将缩入胶囊:即电机6继续反转,多功能解锁板9继续后移,因可动锁牙10锁在锁条13 上不动,致使前导向面9045与可动锁牙10的牙座1001接触,从而驱动牙座1001 上的齿头10013与锁条13脱离,牙座1001停留在前解锁档9046上,齿头10013 与锁条13彻底脱离,当前拉台阶9047碰到牙座1001时,多功能解锁板9将拉动与之连接的钳座11一起向后移动;此时,异位自解锁机构将再次停止变形,多功能解锁板9最终将拉动整个异位自解锁机构一起后移缩入胶囊内。最终将回复到图 11的位置和状态。
71.重复步骤一至五将可再次对人体组织进行采样。
72.显然,异位自解锁机构在来回的路径中,其可动锁牙10锁定和解锁的位置并不重合。
73.本发明利用异位自解锁机构自身所带的多功能解锁板9自我控制其钳座11的移动或驻停,从而实现其取样钳17在不同位置下的张开和闭合,又利用驱动螺旋桨1驱动胶囊运动,从而实现了单个电机驱动异位自解锁机构自我间歇控制完成胶囊式活检机构伸出取样、缩入留样、张开卸样的活检功能,从而可实现一次性吞服完成对人体多部位、多次数的取样操作功能。
74.本发明采用单个电机驱动异位自解锁机构在不同位置点进行解锁及锁定,从而顺序完成胶囊式活检机构伸出取样、缩入留样、张开卸样的活检功能,从而可实现一次性吞服完成对人体多部位、多次数的取样操作功能,降低了控制难度和装置复杂度,减小了胶囊体积和重量,使得装置更加小巧、高效。
75.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的工作人员在本发明揭露的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1