一种可调节式电动移位装置的制作方法
1.本发明涉及医疗辅助器械领域,尤其涉及一种可调节式电动移位装置。
背景技术:
2.电动移位机用于移动行动不便的老人或残障人士,减少了护理人员的劳动强度,在康复领域应用广泛。但是现有移位机操作比较繁琐,需要医护人员将患者固定到移位机上面,而且在抬起与放下患者的过程中两侧抱臂会对患者胸腔产生压迫,降低患者舒适度。有些移位机采用了自适应间距调节机构,利用患者体重向臂托施加压力使其间距增大或减小,但是这种结构对于患者胸腔及腋窝的压迫较大。
3.另外,现有移位机腿托装置多采用固定结构,对不同体型患者适应性较差,而且在抬起与放下患者过程中也会与患者腿部产生干涉,舒适性较差。
技术实现要素:
4.针对现有技术存在的不足,本发明的目的是提供一种可调节式电动移位装置,操作简单、可以适应不同体型患者,增加舒适度。
5.为了实现上述目的,本发明是通过如下的技术方案来实现:
6.本发明的实施例提供了一种可调节式电动移位装置,包括底板组件、转动连接于底板组件顶部的主臂,主臂顶部通过支撑臂与夹抱装置转动连接,主臂与底板组件、支撑臂分别通过电动伸缩杆相连;底板组件与主臂的连接端还安装有腿托机构;
7.所述夹抱装置包括壳体、对称设于壳体两侧的臂托杆,两臂托杆通过设于壳体内的间距调整机构相连。
8.作为进一步的实现方式,所述腿托机构与底板组件铰接,且腿托机构通过电动伸缩杆与底板组件相连。
9.作为进一步的实现方式,所述腿托机构包括腿托和安装架,安装架与底板组件铰接,安装架顶部转动连接两个腿托。
10.作为进一步的实现方式,所述安装架包括腿托杆、连接杆,两个腿托杆的一端通过连接杆相连,腿托杆的另一端与腿托铰接。
11.作为进一步的实现方式,所述腿托杆具有与连接杆垂直的第一杆段、与第一杆段形成设定角度的第二杆段。
12.作为进一步的实现方式,所述间距调整机构包括导轨组件、臂托板、电动伸缩杆,臂托杆通过臂托板与导轨组件滑动连接,臂托板连接电动伸缩杆。
13.作为进一步的实现方式,所述臂托杆外侧套设有柔性垫层,壳体外侧包裹有软垫。
14.作为进一步的实现方式,所述支撑臂交叉设置,支撑臂一端与主臂铰接,另一端与夹抱装置铰接。
15.作为进一步的实现方式,所述主臂远离夹抱装置的一侧连接把手,主臂还安装有控制器,控制器连接各电动伸缩杆。
16.作为进一步的实现方式,所述底板组件包括支撑框、安装于支撑框上侧的底板、安装于支撑框底部的万向轮。
17.本发明的有益效果如下:
18.(1)本发明移位机的夹抱装置包括可相对移动的臂托杆,通过臂托杆使胸腔依靠与夹抱装置的胸靠板上,调整臂托杆间距使其适应患者体型,不需要再通过其他方式固定患者;电动伸缩杆协同运动,将患者抬起至合适部位,操作简单。
19.(2)本发明针对不同体型患者调整臂托杆、腿托的位置,可以减少在抬起与放下患者使对患者胸部的压迫,使患者更加舒适。
20.(3)本发明腿托能够相对于腿托杆旋转,在移位机工作过程中,患者腿部会有一定角度的变化,可活动的腿托能够随患者腿部运动而运动,减少患者腿部的压迫,并起到更多的保护作用。
附图说明
21.构成本发明的一部分的说明书附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。
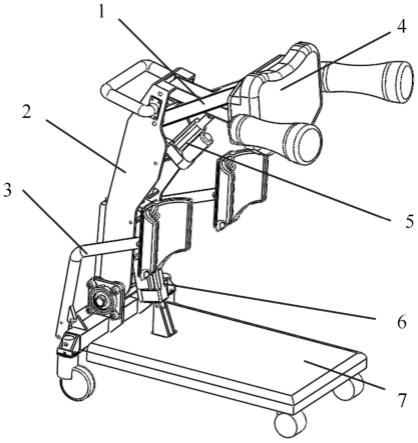
22.图1是本发明根据一个或多个实施方式的立体图一;
23.图2是本发明根据一个或多个实施方式的去掉臂托杆柔性垫层后的立体图;
24.图3是本发明根据一个或多个实施方式的侧视图;
25.图4是本发明根据一个或多个实施方式的立体图二;
26.图5是本发明根据一个或多个实施方式的简化示意图;
27.图6是本发明根据一个或多个实施方式的夹抱装置立体图;
28.图7是本发明根据一个或多个实施方式的夹抱装置内部结构示意图;
29.图8是本发明根据一个或多个实施方式的腿托机构立体图;
30.图9是本发明根据一个或多个实施方式的腿托机构侧视图。
31.其中,1-支撑臂;2-主臂,201-把手,202-控制器,203-电池;3-腿托机构,301-腿托,302-腿托杆,303-连接杆,304-铰接头,305-耳板;4-夹抱装置,401-安装板,402-软垫,403-柔性垫层,404-连接头,405-盖体,406-导轨,407-隔板,408-臂托板,409-臂托杆,410-第四电动伸缩杆;5-第一电动伸缩杆;6-第二电动伸缩杆;7-底板组件,701-底板,702-万向轮,703-支撑框;8-第三电动伸缩杆。
具体实施方式
32.实施例一:
33.本实施例提供了一种可调节式电动移位装置,如图1-图4所示,包括支撑臂1、主臂2、腿托机构3、夹抱装置4、底板组件7,主臂2作为主体支架部分,支撑臂1、腿托机构3、夹抱装置4和底板组件7均安装于主臂2。
34.主臂2一侧靠近顶部位置安装把手201,用于操作人员移动移位机;把手201的形状可以调整,例如为u型、l型或其他形状。主臂2安装有控制器202和电池203,电池203连接控制器202,控制器202连接各电动伸缩杆。控制器202和电池203安装位置可调整,只要不影响其他部件的安装即可,例如安装于主臂2中间位置;主臂2还设有安装显示屏的空间。
35.夹抱装置4安装于主臂2顶部与把手201相对的一侧,夹抱装置4通过支撑臂1与主臂2相连。如图5所示,支撑臂1设有两个,且交叉布置;支撑臂1一端与主臂2铰接,另一端与夹抱装置4铰接;其中两支撑臂1与主臂2(夹抱装置4)的铰接点呈上下布置。
36.其中一个支撑臂1与主臂2之间通过第一电动伸缩杆5相连,第一电动伸缩杆5运动可以推动夹抱装置4升降与旋转角度。
37.主臂2通过轴承座与底板组件7连接,且底板组件7和主臂2之间通过第二电动伸缩杆6相连,第二电动伸缩杆6两端分别通过铰支座与底板组件7、主臂2连接,第二电动伸缩杆6运动可以带动主臂2做往复运动,用于调整患者身体角度。
38.腿托机构3通过铰支座固定于底板组件7,腿托机构3底部通过第三电动伸缩杆8与底板组件7相连,第三电动伸缩杆8运动可以带动腿托机构3做往复运动,以适应不同体型患者。
39.底板组件7作为承载主体,其包括支撑框703、安装于支撑框703上侧的底板701、安装于支撑框703底部的万向轮702,通过万向轮702可以带动移位机做任意方向的运动。
40.在本实施例中,位于前端(以把手201所在侧为前)的两个万向轮702为带有刹车的医用万向轮,位于后端的两个万向轮702为普通医用万向轮。
41.具体的,如图6所示,夹抱装置4包括安装板401、盖体405、臂托杆409、间距调整机构,安装板401和盖体405扣合形成用于安装间距调整机构的壳体,安装板401外侧固定有连接头404,通过连接头404与支撑臂1相连。盖体405外侧包裹有软垫402,通过软。垫402对人体起到保护作用
42.臂托杆409相对于壳体对称设置两个,在本实施例中,臂托杆409呈l型,臂托杆409一端伸入壳体内与间距调整机构相连,另一端位于壳体外侧,并套设有柔性垫层403,通过柔性垫层403对人体起到保护作用。
43.柔性垫层403可以为筒状结构,也可以具有向内侧凹陷的弧度,以提高舒适度。柔性垫层403可以采用海绵等材质。
44.如图7所示,间距调整机构固定于安装板401侧面,包括导轨组件、臂托板408、第四电动伸缩杆410,导轨组件对称设于安装板401两端,每个导轨组件对应一个臂托杆409。
45.臂托杆409与臂托板408相连,臂托板408与导轨组件滑动连接;每个臂托板408分别连接第四电动伸缩杆410,通过第四电动伸缩杆410伸缩带动臂托板408沿导轨组件移动,从而改变两个臂托杆409之间的间距,以适应不同体型的患者。
46.在本实施例中,导轨组件包括两个相互平行的导轨406,臂托板408通过滑块与导轨406连接;两个第四电动伸缩杆410相互平行,二者通过隔板407分隔开。
47.如图8和图9所示,腿托机构3包括腿托301和安装架,安装架与底板组件7的支撑框703铰接,安装架顶部连接两个腿托301,腿托301用于承托患者腿部。腿托301的横截面为朝向安装架一侧凸起的弧形,以适应腿部结构。
48.其中,安装架包括腿托杆302、连接杆303,两个腿托杆302的一端通过连接杆303相连,腿托杆302的另一端与腿托301铰接,使腿托301可绕腿托杆302端部转动,以适应移位机使用过程中患者腿部角度的变化,提高患者舒适度。
49.在本实施例中,腿托杆302具有与连接杆303垂直的第一杆段、与第一杆段形成一定角度的第二杆段;为了适应人体,第二杆段与第一杆段之间形成钝角。
50.连接杆303的中间段底部安装铰接头304,通过铰接头304与支撑框703铰接;腿托杆302的第一杆段靠近连接杆303位置安装耳板305,通过耳板305与支撑框703上的铰支座形成铰接结构。
51.本实施例的各电动伸缩杆运动通过与移位机适配的遥控器控制。
52.本实施例的工作原理为:
53.将患者移动至电动移位机上,使患者胸部依靠在夹抱装置4的软垫402上,两侧腋窝分别夹住臂托杆409的柔性垫层403。若患者体型较大,按动遥控器上的按钮使第四电动伸缩杆410伸出,两臂托杆409之间的距离增大,臂托杆409对患者胸腔的压迫减少;若患者体型较小,则使第四电动伸缩杆410收缩,两臂托杆409之间的距离减小,能够更好的将患者固定到移位机上。
54.患者双脚自然放置到移位机底板组件7上,调整腿托301的高度使其适应患者腿长。若患者腿部较长,通过遥控器控制第三电动伸缩杆8收缩,带动腿托机构3逆时针转动,腿托301远离患者腿部,减少对患者腿部的压迫;若患者腿部较短,控制第三电动伸缩杆8伸出,带动腿托机构3顺时针转动,腿托301贴近患者腿部,对患者腿部起到支撑保护的作用。在移位机工作的过程中,患者腿部会有一定角度的变化,通过可活动的腿托机构3能够随患者腿部运动而运动,减少患者腿部的压迫,进一步起到保护作用。
55.将患者安置好后,通过遥控器控制第一电动伸缩杆5伸出,带动患者身体抬离座位,通过两支撑臂1使得患者身体在运动的过程中完成由垂直到水平的转变;同时,第二电动伸缩杆6伸出,带动患者身体前倾,降低重力对患者腋窝处的作用从而减小患者腋窝处的压迫感,使患者更加舒适。
56.将患者抬离座位后,通过把手201推动载有患者的移位机移动到相应位置,例如厕所、床或浴室等。通过控制第二电动伸缩杆6收回,使患者身体调整到适宜坐下的角度,同时第一电动伸缩杆5收回,使患者身体由水平方向变为垂直方向,最终放置到目标位置。整个过程中只需通过遥控器控制即可完成对患者的位置转移,简单方便且节省力气。
57.以上所述仅为本技术的优选实施例而已,并不用于限制本技术,对于本领域的技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1