一种配置于手术机器人系统的疝修补器械优化结构的制作方法
1.本发明属于手术机器人系统技术领域,尤其涉及一种配置于手术机器人系统的疝修补器械优化结构。
背景技术:
2.疝气的治疗通常采用外科手术的方法,将疝内容物从疝气袋中移出,并将疝气修补片固定在需要修补的薄弱或缺损的腹壁上(疝气袋口),阻止内容物组织再次进入疝气袋位置。
3.腹腔镜手术中,疝气修补片的固定方法通常采用:1.用缝线将组织和修补片缝合固定在一起。2.用疝修补器的专用钉将修补片固定在组织上。
4.机器人系统辅助手术过程中,医生操控手术机器人,用缝线将组织和修补片缝合固定在一起,这种方法的缺点是操作复杂,缝合时间长。另一种方式是由床旁医生手动操作腹腔镜用疝修补器,将补片固定在组织上,这种方法虽然比用缝线缝合的时间短,但由于需要医生与床旁医生默契配合,同样存在操作复杂,手术时间较长的问题。
5.相比下,专用钉式补片固定法具有一定优势,它的操作简洁,固定结构较为统一,不会出现因人为操作因素造成的修补点稳定性差异大的问题,有助于降低手术成本,提高手手术效率。
技术实现要素:
6.本发明的目的在于克服现有技术的缺陷,提供一种配置于手术机器人系统的疝修补器械优化结构。
7.为实现上述目的,本发明采用了如下技术方案:
8.一种配置于手术机器人系统的疝修补器械优化结构,包括器械杆以及位于器械杆内部的送钉机构,其特征在于:所述器械杆的近端与配置器固定连接;
9.在使用时,所述配置器能够与手术机器人系统的致动器对接;
10.所述配置器包括能够带动所述送钉机构进行送钉的第一致动机构、用于带动所述器械杆进行俯仰方向的弯折的第二致动机构以及用于带动所述器械杆进行平摆方向弯折的第三致动机构;所述俯仰方向与平摆方向相互垂直;
11.所述器械杆具有一定的轴向长度,所述器械杆带有关节部,第二致动机构和第三致动机构分别通过驱动丝机构与所述关节部固定连接;
12.器械杆包括器身管,送钉机构包括与器身管固定连接的螺旋轨道以及插装在螺旋轨道中部的送钉杆,螺旋状的专用钉与螺旋轨道相连,专用钉的尾部位于送钉杆的储钉槽内;第一致动机构与送钉杆相连,当第一致动机构带动送钉杆转动时,螺旋状的专用钉沿着螺旋轨道旋转并沿着器械杆的轴线方向移动;
13.第二致动机构包括卡盘一、与卡盘一固定连接的驱动线轴一以及与驱动线轴一固定连接的丝线一和丝线二,丝线一和丝线二的一端分别与驱动线轴一固定连接,丝线一和
丝线二的另一端与关节部固定连接;
14.第三致动机构包括卡盘二、与卡盘二固定连接驱动线轴二以及与驱动线轴二固定连接的丝线三和丝线四,丝线三和丝线四的一端分别与驱动线轴二固定连接,丝线三和丝线四的另一端分别与关节部固定连接。
15.优选的,驱动线轴一的外部设置有两组旋向相反的螺旋线槽,丝线一和丝线二的一部分沿着对应的螺旋线槽盘绕在驱动线轴一的外部;
16.驱动线轴二的外部设置有两组旋向相反的螺旋线槽,丝线三和丝线四的一部分沿着对应的螺旋线槽盘绕在驱动线轴二的外部。
17.优选的,所述送钉杆包括远部送钉杆和近部送钉杆,所述远部送钉杆与近部送钉杆之间通过挠性连接部固定连接;所述挠性连接部外部套设有润滑管;润滑管的两端分别与近部送钉杆和远部送钉杆固定连接。
18.优选的,所述第一致动机构包括卡盘三、与所述卡盘三固定连接的送钉轮以及与所述送钉轮相连的驱动座,所述送钉杆的近端与所述驱动座固定连接;
19.所述驱动座包括位于驱动座外部的并沿着驱动座外周排布的齿轮,送钉轮的齿轮与驱动座的齿轮相啮合;
20.配置器内固定设置有支架部,所述驱动座通过轴承与支架部固定连接。
21.优选的,支架部固定设置有固线器,所述固线器位于驱动座的下方,丝线一、丝线二、丝线三以及丝线四分别通过固线器的导线孔伸入器身管。
22.优选的,配置器中的固线器的上端面为倾斜面,所述倾斜面靠近驱动线轴一和驱动线轴二的一侧的高度低于远离驱动线轴一和驱动线轴二的一侧的高度,所述倾斜面相对于水平面的倾斜角度为15度至30度;
23.所述支架部设置有供丝线一、丝线二、丝线三以及丝线四进入至固线器的过口;
24.固线器的导线孔的上口内嵌置有耐磨套。
25.优选的,所述驱动丝机构包括位于驱动丝机构近端的柔性部、位于驱动丝机构远端的柔性部以及位于驱动丝机构中部的刚性部。
26.优选的,所述近部送钉杆与器身管之间设置有密封环,所述密封环的内侧与近部送钉杆相抵接,密封环的外侧与器身管的内壁相抵接,驱动丝机构穿过密封环的线孔向器身管的远端延伸,当送钉杆转动时,密封环与送钉杆之间能够相对转动。
27.优选的,驱动丝机构通过多个变向轮组进入器身管,所述变向轮组包括第一变向轮和第二变向轮,第二变向轮位于第一变向轮下方;第一变向轮与第二变向轮的横截面的中线的位置相互错位。
28.优选的,位于近端的柔性部与线轴一或线轴二相连,位于近端的柔性部延伸至器身管内并与对应的刚性部固定连接,所述刚性部在器身管内沿器身管轴线方向延伸一定长度后与位于远端的柔性部固定连接,位于远端的柔性部自器身管内延伸至关节部并与并与关节部固定连接。
29.本发明所公开的一种配置于手术机器人系统的疝修补器械优化结构,能够配置于现有手术机器人系统,在进行疝修补术过程中,采用双线控驱动进行远端的弯折调整,定位后对疝修补区域进行锚钉,能够提高手术操作的便捷性,进一步实现较为远程的外科手术操作。
附图说明
30.附图1是本发明的结构示意图;
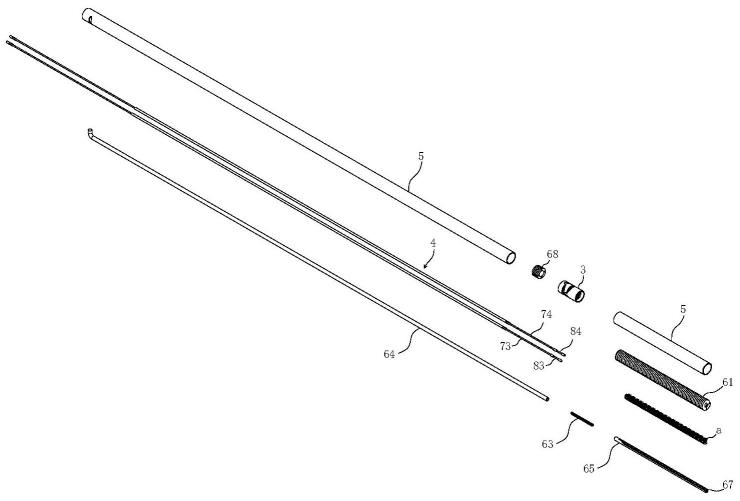
31.附图2是本发明的远部送钉杆、近部送钉杆与挠性连接部的位置关系的结构示意图;
32.附图3是本发明的螺旋轨道与专用钉的位置关系的结构示意图;
33.附图4是本发明的驱动线轴一、驱动线轴二与支架部的位置关系的结构示意图;
34.附图5是本发明的固线器的结构示意图;
35.附图6是本发明的驱动丝机构中刚性部、柔性部与器身管的位置关系的结构示意图;
36.附图7是本发明的一些实施例中所应用的专用钉的结构示意图;
37.附图8是本发明的配置器中的卡盘分布的结构示意图;
38.附图9是本发明的丝线一、丝线二、丝线三以及丝线四与关节的连接位置的结构示意图;
39.附图10是本发明的一个实施例的结构示意图;
40.附图11是本发明的附图3中a部放大示意图;
41.在附图中,1器械杆、2配置器、21支架部、22固线器、23导线孔、24过口、3关节部、4驱动丝机构、5器身管、61螺旋轨道、62送钉杆、63挠性连接部、64近部送钉杆、65远部送钉杆、66润滑管、67储钉槽、68密封环、71卡盘一、72驱动线轴一、73丝线一、74丝线二、75螺旋线槽、81卡盘二、82驱动线轴二、83丝线三、84丝线四、91卡盘三、92送钉轮、93驱动座、94齿轮、a专用钉、a1专用钉的尾部、a2专用钉的头部、b器身管的内壁、c刚性部、c1柔性部、d1第一变向轮、d2第二变向轮。
具体实施方式
42.以下结合附图给出的实施例,进一步说明具体实施方式。本发明不限于以下实施例的描述。
43.为表述清楚明确,以下实施例中,以器械与手术机器人对接位置为基准,靠近手术机器人系统的一端为近端远离手术机器人系统的一端为远端。
44.实施例1
45.参照附图1所示,一种配置于手术机器人系统的疝修补器械优化结构,它包括器械杆1以及位于器械杆1内部的送钉机构,所述器械杆1的近端与配置器2固定连接。在使用时,所述配置器2能够与手术机器人系统的致动器对接。
46.参照附图3和4,配置器2包括能够带动所述送钉机构进行送钉的第一致动机构、用于带动所述器械杆1进行俯仰方向的弯折的第二致动机构以及用于带动所述器械杆1进行平摆方向弯折的第三致动机构。参照附图9所示,所述俯仰方向与平摆方向相互垂直。
47.参照附图1和2和3所示,所述器械杆1具有一定的轴向长度,所述器械杆1带有关节部3,第二致动机构和第三致动机构分别通过驱动丝机构4与所述关节部3固定连接。器械杆1包括器身管5,送钉机构包括与器身管5固定连接的螺旋轨道61以及插装在螺旋轨道61中部的送钉杆62,螺旋状的专用钉a与螺旋轨道61相连,专用钉a的尾部位于送钉杆62的储钉槽67内;第一致动机构与送钉杆62相连,当第一致动机构带动送钉杆62转动时,螺旋状的专
用钉a沿着螺旋轨道61旋转并沿着器械杆1的轴线方向移动。
48.参照附图3和4和8和9所示,优选的,第二致动机构包括卡盘一71、与卡盘一71固定连接的驱动线轴一72以及与驱动线轴一72固定连接的丝线一73和丝线二74,丝线一73和丝线二74的一端分别与驱动线轴一72固定连接,丝线一73和丝线二74的另一端与关节部3固定连接。第三致动机构包括卡盘二81、与卡盘二81固定连接驱动线轴二82以及与驱动线轴二82固定连接的丝线三83和丝线四84,丝线三83和丝线四84的一端分别与驱动线轴二82固定连接,丝线三83和丝线四84的另一端分别与关节部3固定连接。在本发明的一些实施例中,关节部3为至少三段式关节,相邻的铰接节间能够以铰接轴为轴进行一定幅度的弯转,至少能够进行两个相互垂直的方向的弯转。
49.在本实施例中采用双线控自由度来调整疝修补器械的出钉口的朝向,在使用时,手术机器人系统对第二致动机构与第三致动机构联动控制。双线控自由度器械相对于单线控自由度+器身管5自传的方式来调整出钉口的朝向,其装配成本虽有所提升,但在使用过程中能够胜任更复杂的姿态动作。
50.参照附图4所示,驱动线轴一72的外部设置有两组旋向相反的螺旋线槽75,丝线一73和丝线二74的一部分沿着对应的螺旋线槽75盘绕在驱动线轴一72的外部。
51.驱动线轴二82的外部设置有两组旋向相反的螺旋线槽75,丝线三83和丝线四84的一部分沿着对应的螺旋线槽75盘绕在驱动线轴二82的外部。
52.参照附图1和2和3所示,优选的,所述送钉杆62包括远部送钉杆65和近部送钉杆64,所述远部送钉杆65与近部送钉杆64之间通过挠性连接部63固定连接。所述挠性连接部63外部套设有润滑管66。润滑管66的两端分别与近部送钉杆64和远部送钉杆65固定连接。挠性连接部能够随着关节部进行弯折,并且在近部送钉杆转动时,其能够随之转动并带动远部送钉杆转动。
53.参照附图2和3所示,优选的,本发明的一些实施例中,所述挠性连接部63采用多股紧密盘绕的钢丝集成而成,包括位于中部的主丝,紧密地盘绕在主丝外部的螺旋丝,螺旋丝的两端与对应的主丝的两端牢固的焊接。
54.参照附图4和8所示,优选的,所述第一致动机构包括卡盘三91、与所述卡盘三91固定连接的送钉轮92以及与所述送钉轮92相连的驱动座93,所述送钉杆62的近端与所述驱动座93固定连接。驱动座93包括位于驱动座93外部的并沿着驱动座93外周排布的齿轮94,送钉轮92的齿轮与驱动座93的齿轮相啮合。配置器2内固定设置有支架部21,所述驱动座93通过轴承与支架部21固定连接。
55.参照附图5,优选的,支架部21固定设置有固线器22,所述固线器22位于驱动座93的下方,丝线一73、丝线二74、丝线三83以及丝线四84分别通过固线器22的导线孔23伸入器身管5。固线器22与驱动座93自下至上依次固定设置在支架部21上。送钉杆62自固线器22的中部轴孔伸入至驱动座93并与驱动座93固定连接。
56.参照附图5所示,优选的,配置器2中的固线器22的上端面为倾斜面,所述倾斜面靠近驱动线轴一72和驱动线轴二82的一侧的高度低于远离驱动线轴一72和驱动线轴二82的一侧的高度,所述倾斜面相对于水平面的倾斜角度为15度至30度;
57.所述支架部21设置有供丝线一73、丝线二74、丝线三83以及丝线四84进入至固线器22的过口24。固线器22的导线孔23的上口内嵌置有耐磨套。
58.参照附图2和10所示,在发明的一些实施例中,驱动丝机构4通过多个变向轮组进入器身管5,所述变向轮组包括第一变向轮d1和第二变向轮d2,第二变向轮位于第一变向轮下方。优选的,在本发明的一些实施例中,为进一步提高驱动丝机构的稳定性:第一变向轮与第二变向轮的横截面的中线的位置相互错位。参照附图6所示,驱动丝机构包括位于驱动丝机构近端的柔性部、位于驱动丝机构远端的柔性部以及位于驱动丝机构中部的刚性部。位于近端的柔性部与对应的线轴一或线轴二相连,位于近端的柔性部延伸至器身管内并与对应的刚性部固定连接,所述刚性部在器身管内沿器身管轴线方向延伸一定长度后与位于远端的柔性部固定连接,位于远端的柔性部自器身管内延伸至关节部并与并与关节部固定连接。
59.参照附图8所示,在本实施例中,配置器2与手术机器人系统的臂系统中标准致动器对接,使用致动器中的三个致动卡盘,其余致动卡盘位置预留让位空间,以便在配置过程中,配置器2能够顺利与手术机器人系统的致动器对接。
60.参照附图2和3所示,所述近部送钉杆与器身管之间设置有密封环,所述密封环的内侧与近部送钉杆相抵接,密封环的外侧与器身管的内壁相抵接,驱动丝机构穿过密封环的线孔向器身管的远端延伸,当送钉杆转动时,密封环与送钉杆之间能够相对转动。本实施例中所述相对转动可理解为当物体一转动时,套装在其外部的物体二不随之转动,从而造成二者相对的转动。
61.参照附图3和11所示,延器身管的中轴线做剖切平面得到的螺旋轨道的剖面为矩形。更利于螺旋轨道与器身管内侧壁相焊接固定。
62.以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1