一种铁路专用线推送调车安全预警方法、装置及系统
1.本发明属于推送调车技术领域,具体地涉及一种铁路专用线推送调车安全预警方法、装置及系统。
背景技术:
2.目前铁路专用线调车作业通常采用推送调车的方式,即在车组行驶方向后方利用调车机车的机车动力向前推动车组运行到达指定位置来完成作业。由于在推送调车作业过程中,机车司机会受多节车厢阻挡而无法看清前方路况及信号,因此在现有技术设备条件下需要调车员登车并在被推送车组的头部进行瞭望,通过旗帜或手持无线对讲机的方式将前方情况告知司机。但是此种方式明显存在着调车员目视测距不准确、前后方沟通不及时、行驶速度控制滞后以及调车员抓乘车辆容易坠落等问题,存在极大的安全隐患。
技术实现要素:
3.为了解决现有铁路专用线推送调车作业过程中存在司机瞭望困难以及前后方通讯滞后的问题,本发明目的在于提供一种铁路专用线推送调车安全预警方法、装置、系统、计算机设备及计算机可读存储介质,可基于多源信息融合识别车前障碍物,提高铁路专用线取送调车作业效率及铁路运输生产效率,便于实际应用和推广。
4.第一方面,本发明提供了一种铁路专用线推送调车安全预警方法,适用于由调车机车的车载计算机执行,包括:
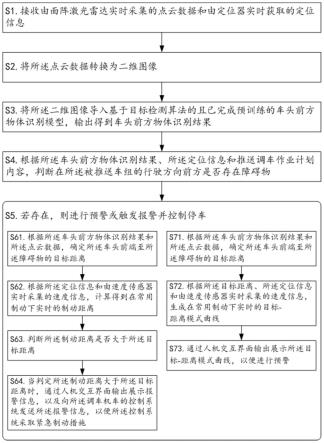
5.接收由面阵激光雷达实时采集的点云数据和由定位器实时获取的定位信息,其中,所述面阵激光雷达可拆卸地安装在被推送车组的车头前端,所述被推送车组是指被位于车组行驶方向后方的所述调车机车推动行驶的车组,所述定位器安装在所述调车机车或所述被推送车组上,所述点云数据包含有多个激光发射点至车头前方物体的距离值,所述多个激光发射点位于所述面阵激光雷达的面阵上;
6.将所述点云数据转换为二维图像,其中,所述二维图像的多个像素点与所述多个激光发射点一一对应;
7.将所述二维图像导入基于目标检测算法的且已完成预训练的车头前方物体识别模型,输出得到车头前方物体识别结果;
8.根据所述车头前方物体识别结果、所述定位信息和推送调车作业计划内容,判断在所述被推送车组的行驶方向前方是否存在障碍物;
9.若存在,则进行预警或触发报警并控制停车。
10.基于上述发明内容,可提供一种基于多源信息融合识别车前障碍物的新方案,即先将由面阵激光雷达实时采集的点云数据转换为二维图像,然后将所述二维图像导入基于目标检测算法的且已完成预训练的车头前方物体识别模型,输出得到车头前方物体识别结果,再然后根据所述车头前方物体识别结果、由定位器实时获取的定位信息和推送调车作业计划内容,判断在被推送车组的行驶方向前方是否存在障碍物,最后在是时进行预警或
触发报警并控制停车,如此不但可以完成司机视野盲区内路况信息的获取,帮助司机及时、全面地掌握车组移动状况,减轻司机的劳动强度和作业压力,还可以通过智能化手段增强推送车组对前方障碍物的识别能力,避免由于调车员观察疏漏或与司机之间沟通不畅所导致的安全隐患,实现调车作业智能化,最大限度保证作业安全,进而提高铁路专用线取送调车作业效率及铁路运输生产效率,便于实际应用和推广。
11.在一个可能的设计中,根据所述车头前方物体识别结果、所述定位信息和推送调车作业计划内容,判断在所述被推送车组的行驶方向前方是否存在障碍物,包括:
12.根据所述定位信息确定所述车头前端的所在位置;
13.根据所述车头前端的所在位置和推送调车作业计划内容,判断所述车头前端是否已进入预设的推送调车作业范围内;
14.当判定所述车头前端已进入所述推送调车作业范围内时,根据所述推送调车作业计划内容,判断是否有车组连挂作业;
15.当判定有车组连挂作业时,若所述车头前方物体识别结果显示在行驶方向前方存在识别出的目标物体且该目标物体不为待连挂车辆,则判定在所述被推送车组的行驶方向前方存在障碍物。
16.在一个可能的设计中,进行预警或触发报警并控制停车,包括:
17.先根据所述车头前方物体识别结果和所述点云数据,确定所述车头前端至所述障碍物的目标距离,然后根据所述目标距离、所述定位信息和由速度传感器实时采集的速度信息,生成在常用制动下实时的目标-距离模式曲线,最后通过人机交互界面输出展示所述目标-距离模式曲线,以便进行预警,其中,所述速度传感器安装在所述调车机车或所述被推送车组上;
18.或者,先根据所述车头前方物体识别结果和所述点云数据,确定所述车头前端至所述障碍物的目标距离,然后根据所述定位信息和由速度传感器实时采集的速度信息,计算得到在常用制动下实时的制动距离,再然后判断所述制动距离是否大于所述目标距离,最后当判定所述制动距离大于所述目标距离时,通过人机交互界面输出展示报警信息,以及向所述调车机车的控制系统发送所述报警信息,以便所述控制系统采取紧急制动措施,其中,所述速度传感器安装在所述调车机车或所述被推送车组上。
19.在一个可能的设计中,根据所述车头前方物体识别结果和所述点云数据,确定所述车头前端至所述障碍物的目标距离,包括:
20.根据所述车头前方物体识别结果,确定用于在所述二维图像中标记所述障碍物的标记框;
21.根据所述点云数据与所述二维图像的转换关系,确定与位于所述标记框内的至少一个像素点一一对应的至少一个激光发射点;
22.根据所述点云数据中的且与所述至少一个激光发射点对应的距离值,确定最小距离值,并将所述最小距离值作为所述车头前端至所述障碍物的目标距离。
23.在一个可能的设计中,根据所述定位信息和由速度传感器实时采集的速度信息,计算得到在常用制动下实时的制动距离,包括:
24.根据所述定位信息确定所述车头前端的初始位置,以及根据由速度传感器实时采集的速度信息确定所述车头前端的初始速度,其中,所述速度传感器安装在所述调车机车
或所述被推送车组上;
25.以所述初始位置为起点,将位于车头前方的行车路线划分为若干个单位步距;
26.按照如下步骤s621~s625计算得到在常用制动下实时的制动距离:
27.s621.将步距数m初始化为1,然后执行步骤s622;
28.s622.针对沿车组行驶方向位于所述车头前方的第m个单位步距,根据对应的线路条件信息和所述调车机车在常用制动下的制动性能信息,计算得到对应的制动减速度,然后执行步骤s623;
29.s623.针对所述第m个单位步距,根据对应的经过前速度及制动减速度,计算得到对应的经过后速度,然后执行步骤s624,其中,当m为1时,对应的经过前速度为所述初始速度,而当m大于1时,对应的经过前速度为与沿车组行驶方向位于所述车头前方的第m-1个单位步距对应的经过后速度;
30.s624.针对所述第m个单位步距,判断对应的经过后速度是否大于目标速度,若是,则使m自加1,然后返回执行步骤s622,否则执行步骤s625;
31.s625.将m个单位步距的总长度作为在常用制动下实时的制动距离。
32.在一个可能的设计中,根据所述目标距离、所述定位信息和由速度传感器实时采集的速度信息,生成在常用制动下实时的目标-距离模式曲线,包括:
33.根据所述定位信息确定所述车头前端的初始位置,以及根据由速度传感器实时采集的速度信息确定所述车头前端的初始速度,其中,所述速度传感器安装在所述调车机车或所述被推送车组上;
34.以所述初始位置为起点,将位于车头前方的行车路线划分为若干个单位步距;
35.按照如下步骤s721~s727生成在常用制动下实时的目标-距离模式曲线:
36.s721.将步距数n初始化为1,然后执行步骤s722;
37.s722.针对沿车组行驶方向位于所述车头前方的第n个单位步距,根据所述初始速度和对应的起点位置,计算得到对应的且在常用制动下的所需制动距离,然后执行步骤s723;
38.s723.针对所述第n个单位步距,判断对应的所需制动距离是否小于所述目标距离,若是,则确定对应的经过后速度为所述初始速度,并使n自加1,然后返回执行步骤s722,否则执行步骤s724;
39.s724.针对所述第n个单位步距,根据对应的线路条件信息和所述调车机车在常用制动下的制动性能信息,计算得到对应的制动减速度,然后执行步骤s725;
40.s725.针对所述第n个单位步距,根据对应的经过前速度及制动减速度,计算得到对应的经过后速度,然后执行步骤s726,其中,当n为1时,对应的经过前速度为所述初始速度,而当n大于1时,对应的经过前速度为与沿车组行驶方向位于所述车头前方的第n-1个单位步距对应的经过后速度;
41.s726.针对所述第n个单位步距,判断对应的经过后速度是否大于目标速度,若是,则使n自加1,然后返回执行步骤s722,否则执行步骤s727;
42.s727.根据沿车组行驶方向位于所述车头前方的前n个单位步距以及n个经过前速度和n个经过后速度,生成在常用制动下实时的目标-距离模式曲线,其中,所述n个经过前速度与所述前n个单位步距一一对应,所述n个经过后速度与所述前n个单位步距一一对应。
43.第二方面,本发明提供了一种铁路专用线推送调车安全预警装置,适用于布置在调车机车的车载计算机中,包括有依次通信连接的接收模块、转换模块、识别模块、判断模块和响应模块;
44.所述接收模块,用于接收由面阵激光雷达实时采集的点云数据和由定位器实时获取的定位信息,其中,所述面阵激光雷达可拆卸地安装在被推送车组的车头前端,所述被推送车组是指被位于车组行驶方向后方的所述调车机车推动行驶的车组,所述定位器安装在所述调车机车或所述被推送车组上,所述点云数据包含有多个激光发射点至车头前方物体的距离值,所述多个激光发射点位于所述面阵激光雷达的面阵上;
45.所述转换模块,用于将所述点云数据转换为二维图像,其中,所述二维图像的多个像素点与所述多个激光发射点一一对应;
46.所述识别模块,用于将所述二维图像导入基于目标检测算法的且已完成预训练的车头前方物体识别模型,输出得到车头前方物体识别结果;
47.所述判断模块,用于根据所述车头前方物体识别结果、所述定位信息和推送调车作业计划内容,判断在所述被推送车组的行驶方向前方是否存在障碍物;
48.所述响应模块,用于在判定前方存在障碍物时,进行预警或触发报警并控制停车。
49.第三方面,本发明提供了一种铁路专用线推送调车安全预警系统,包括有面阵激光雷达、定位器和车载计算机,其中,所述面阵激光雷达可拆卸地安装在被推送车组的车头前端,所述定位器安装在调车机车或所述被推送车组上,所述车载计算机安装在所述调车机车中,所述被推送车组是指被位于车组行驶方向后方的所述调车机车推动行驶的车组;
50.所述面阵激光雷达,用于实时采集点云数据,其中,所述点云数据包含有多个激光发射点至车头前方物体的距离值,所述多个激光发射点位于所述面阵激光雷达的面阵上;
51.所述定位器,用于实时获取所处位置的定位信息;
52.所述车载计算机,分别通信连接所述面阵激光雷达和所述定位器,用于在获取到来自所述面阵激光雷达的点云数据和来自所述定位器的定位信息后,执行如第一方面或第一方面中任意一种可能设计所述的铁路专用线推送调车安全预警方法。
53.第四方面,本发明提供了一种计算机设备,包括有依次通信相连的存储器、处理器和收发器,其中,所述存储器用于存储计算机程序,所述收发器用于收发消息,所述处理器用于读取所述计算机程序,执行如第一方面或第一方面中任意一种可能设计所述的铁路专用线推送调车安全预警方法。
54.第五方面,本发明提供了一种计算机可读存储介质,所述计算机可读存储介质上存储有指令,当所述指令在计算机上运行时,执行如上第一方面或第一方面中任意一种可能设计的所述的铁路专用线推送调车安全预警方法。
55.第六方面,本发明提供了一种包含指令的计算机程序产品,当所述指令在计算机上运行时,使所述计算机执行如上第一方面或第一方面中任意一种可能设计的所述的铁路专用线推送调车安全预警方法。
56.本发明内容的有益效果:
57.(1)本发明创造提供了一种基于多源信息融合识别车前障碍物的新方案,即先将由面阵激光雷达实时采集的点云数据转换为二维图像,然后将所述二维图像导入基于目标检测算法的且已完成预训练的车头前方物体识别模型,输出得到车头前方物体识别结果,
再然后根据所述车头前方物体识别结果、由定位器实时获取的定位信息和推送调车作业计划内容,判断在被推送车组的行驶方向前方是否存在障碍物,最后在是时进行预警或触发报警并控制停车,如此不但可以完成司机视野盲区内路况信息的获取,帮助司机及时、全面地掌握车组移动状况,减轻司机的劳动强度和作业压力,还可以通过智能化手段增强推送车组对前方障碍物的识别能力,避免由于调车员观察疏漏或与司机之间沟通不畅所导致的安全隐患,实现调车作业智能化,最大限度保证作业安全,进而提高铁路专用线取送调车作业效率及铁路运输生产效率;
58.(2)可以实时完成司机视野盲区内成像信息的采集和传输工作,向调车司机提供精确的安全距离及线路状况等信息,实现了铁路专用线调车作业自动化和智能化,有效防止列车超出安全区段冲撞土挡或碰撞线路异物的发生,提升了作业安全性;
59.(3)由于是融合激光雷达距离信息和成像信息与调车作业计划等多源信息来判别车列前方运行状况,可减少误判目标物所导致的作业中断,提高系统容错率,保证调车作业安全和高效;
60.(4)由于是对现有以速度分段法为核心的目标-距离模式曲线算法进行了改进与创新,可更符合专用线推送调车作业所具有的运行速度低、目标距离短、制动点控制精度要求高的特点。
附图说明
61.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
62.图1是本发明提供的铁路专用线推送调车安全预警方法的流程示意图。
63.图2是本发明提供的面阵激光雷达及车载计算机的安装布置示意图。
64.图3是本发明提供的二维图像及标记框的示例图。
65.图4是本发明提供的障碍物判断逻辑的流程示意图。
66.图5是本发明提供的制动距离计算方式的流程示意图。
67.图6是本发明提供的在行车报警状态时进行报警的人机交互界面示例图。
68.图7是本发明提供的目标-距离模式曲线生成方式的流程示意图。
69.图8是本发明提供的在匀速行驶状态时进行预警的人机交互界面示例图。
70.图9是本发明提供的在减速行驶状态时进行预警的人机交互界面示例图。
71.图10是本发明提供的铁路专用线推送调车安全预警装置的结构示意图。
72.图11是本发明提供的铁路专用线推送调车安全预警系统的结构示意图。
73.图12是本发明提供的计算机设备的结构示意图。
具体实施方式
74.下面结合附图及具体实施例来对本发明作进一步阐述。在此需要说明的是,对于这些实施例方式的说明虽然是用于帮助理解本发明,但并不构成对本发明的限定。本文公开的特定结构和功能细节仅用于描述本发明示例的实施例。然而,可用很多备选的形式来
regions with convolutional neural networks features,由何凯明等在2015年提出目标检测算法,该算法在2015年的ilsvrv和coco竞赛中获得多项第一)目标检测算法、ssd(single shot multibox detector,单镜头多盒检测器,是weiliu在eccv 2016上提出的一种目标检测算法,是目前流行的主要检测框架之一)目标检测算法或yolo(youonly look once,目前最新已经发展到v5版本,在业界的应用也很广泛,其基本原理是:首先对输入图像划分成7x7的网格,对每个网格预测2个边框,然后根据阈值去除可能性比较低的目标窗口,最后再使用边框合并的方式去除冗余窗口,得出检测结果)目标检测算法等。因此通过常规的样本训练方式,可以得到用于根据输入图像识别是否有车头前方物体及其类型的所述车头前方物体识别模型,以便在输入测试图像后,可以输出对应的识别结果以及置信度预测值等信息。举例的,所述目标检测算法优选采用具有训练速度快、模型小和实时性强等特点的yolov5目标检测算法。
84.在所述步骤s3中,所述车头前方物体识别模型的具体训练及识别过程可以但不限于包括有如下步骤s301~s304。
85.s301.环境搭建:基于深度学习框架pytorch进行图像识别处理。
86.s302.图像标注与增强:先将由所述面阵激光雷达历史采集的点云数据转换成可视化的二维图像,然后基于转换所得图像及部分专用线货车图片构建待处理的训练样本数据集,并利用图像标注工具labelimg对所述训练样本数据集中的所有图像进行人工框选标注。同时为了提高图像识别的可靠性,利用图像增强技术对所述训练样本数据集中的所有图像进行模糊、亮度调整、裁剪、旋转、平移和/或镜像等处理,以便将样本数据集扩充多倍。
87.s303.模型训练:在实际训练中,将用于记录数据集图片和存储数据标注结果的.xml文件的80%划分为训练集,剩余20%划分为测试集,并选择训练轮次(epochs=100),以及向基于yolov5目标检测算法的待训练模型喂入诸如批次文件(batch-size=143)等模型参数,进而得到训练结果。
88.s304.识别结果:在模型训练过程中通过调用tensorbord函数来可视化展现模型训练过程,并根据展现结果可发现在经过100轮训练后,能够使基于所述测试集的准确率达到0.95左右。在训练完成后,利用所生成的最佳权重网络数据,即可对所述二维图像进行目标检测,如图3所示,可以准确识别并框选出列车位置。
89.s4.根据所述车头前方物体识别结果、所述定位信息和推送调车作业计划内容,判断在所述被推送车组的行驶方向前方是否存在障碍物。
90.在所述步骤s4中,所述推送调车作业计划内容用于记载诸如推送调车作业范围以及车组连挂作业任务等具体信息。考虑专用线调车作业存在走行距离长、环境复杂以及在推送过程中车组前方可能出现入侵异物、尽头土档和待连挂车辆等目标物的情况,需要明确判断前方物体的存在是否影响推送车组的正常走行,因此通过基于所述车头前方物体识别结果、所述定位信息和所述推送调车作业计划内容来判断车前是否存在障碍物,可以实现对车前障碍物进行多源信息融合识别的目的,将障碍物识别准确率由95%(即仅基于面阵激光雷达成像信息的目标检测识别结果)提高至99.6%,大大提升后续预警或报警动作的可靠性和容错率,进而可利于提高调车作业效率。具体的,如图4所示,根据所述车头前方物体识别结果、所述定位信息和推送调车作业计划内容,判断在所述被推送车组的行驶方向前方是否存在障碍物,包括但不限于有如下步骤s41~s44。
91.s41.根据所述定位信息确定所述车头前端的所在位置。
92.在所述步骤s41中,所述定位器不论是安装在所述调车机车或所述被推送车组的何处位置,其安装位置与所述车头前端的位置关系都是固定的(除非连挂有新的车辆,此时所述面阵激光雷达需重新安装在新的车头前端)且可预先已知的,因此可以基于这种固定的位置关系,根据所述定位信息来确定出所述车头前端的所在位置。
93.s42.根据所述车头前端的所在位置和推送调车作业计划内容,判断所述车头前端是否已进入预设的推送调车作业范围内。
94.s43.当判定所述车头前端已进入所述推送调车作业范围内时,根据所述推送调车作业计划内容,判断是否有车组连挂作业。
95.在所述步骤s42之后,还当判定所述车头前端未进入所述推送调车作业范围内时,需要进一步根据所述车头前方物体识别结果来判断在所述被推送车组的行驶方向前方是否存在障碍物:若所述车头前方物体识别结果显示在行驶方向前方不存在能够识别出的目标物体,则认为在所述被推送车组的行驶方向前方不存在障碍物,可以保持正常的走行模式,否则认为在所述被推送车组的行驶方向前方存在障碍物(即不论识别出的目标物体为何种物体,都认为存在障碍物),需要进行预警或触发报警并控制停车。
96.s44.当判定有车组连挂作业时,若所述车头前方物体识别结果显示在行驶方向前方存在识别出的目标物体且该目标物体不为待连挂车辆,则判定在所述被推送车组的行驶方向前方存在障碍物。
97.在所述步骤s43之后,还当判定无车组连挂作业时,同样需要进一步根据所述车头前方物体识别结果来判断在所述被推送车组的行驶方向前方是否存在障碍物:若所述车头前方物体识别结果显示在行驶方向前方不存在能够识别出的目标物体,则认为在所述被推送车组的行驶方向前方不存在障碍物,可以保持正常的走行模式,否则认为在所述被推送车组的行驶方向前方存在障碍物(即不论识别出的目标物体为何种物体,都认为存在障碍物),需要进行预警或触发报警并控制停车。
98.在所述步骤s44中,还当判定有车组连挂作业时,若所述车头前方物体识别结果显示在行驶方向前方不存在能够识别出的目标物体,则认为在所述被推送车组的行驶方向前方不存在障碍物,可以保持正常的走行模式;而若所述车头前方物体识别结果显示在行驶方向前方存在识别出的目标物体且该目标物体为待连挂车辆,则需进入连挂模式并提示和/或控制以安全速度行驶,以便进行车辆连挂。此外,在连挂所述待连挂车辆后,需要将所述面阵激光雷达重新安装在新的车头前端,以便继续采集车前的点云数据。
99.s5.若存在,则进行预警或触发报警并控制停车。
100.由此通过前述步骤s1~s5所描述的铁路专用线推送调车安全预警方法,提供了一种基于多源信息融合识别车前障碍物的新方案,即先将由面阵激光雷达实时采集的点云数据转换为二维图像,然后将所述二维图像导入基于目标检测算法的且已完成预训练的车头前方物体识别模型,输出得到车头前方物体识别结果,再然后根据所述车头前方物体识别结果、由定位器实时获取的定位信息和推送调车作业计划内容,判断在被推送车组的行驶方向前方是否存在障碍物,最后在是时进行预警或触发报警并控制停车,如此不但可以完成司机视野盲区内路况信息的获取,帮助司机及时、全面地掌握车组移动状况,减轻司机的劳动强度和作业压力,还可以通过智能化手段增强推送车组对前方障碍物的识别能力,避
免由于调车员观察疏漏或与司机之间沟通不畅所导致的安全隐患,实现调车作业智能化,最大限度保证作业安全,进而提高铁路专用线取送调车作业效率及铁路运输生产效率,便于实际应用和推广。
101.本实施例在前述第一方面的技术方案基础上,还提供了一种在有车前障碍物时具体触发报警并控制停车的可能设计一,即触发报警并控制停车,包括但不限于有如下步骤s61~s64。
102.s61.根据所述车头前方物体识别结果和所述点云数据,确定所述车头前端至所述障碍物的目标距离。
103.在所述步骤s61中,具体的,包括但不限于有如下步骤s611~s613:s611.根据所述车头前方物体识别结果,确定用于在所述二维图像中标记所述障碍物的标记框;s612.根据所述点云数据与所述二维图像的转换关系,确定与位于所述标记框内的至少一个像素点一一对应的至少一个激光发射点;s613.根据所述点云数据中的且与所述至少一个激光发射点对应的距离值,确定最小距离值,并将所述最小距离值作为所述车头前端至所述障碍物的目标距离。由于所述车头前方物体识别结果是基于目标检测算法识别而得,因此当存在所述障碍物时,根据所述车头前方物体识别结果必定可以得到用于在所述二维图像中标记所述障碍物的标记框,如图3所示。
104.s62.根据所述定位信息和由速度传感器实时采集的速度信息,计算得到在常用制动下实时的制动距离,其中,所述速度传感器安装在所述调车机车或所述被推送车组上。
105.在所述步骤s62中,所述速度传感器用于实时采集车速;由于所述调车机车、所述被推送车组及所述车头前端是一体运动的,因此所述速度传感器不论是安装在所述调车机车或所述被推送车组的何处位置,其所采集的实时车速也是所述调车机车的实时速度、所述被推送车组的实时速度及所述车头前端的实时速度。同时考虑专用线调车作业场景存在运行速度低、目标距离短以及制动点控制精度要求高的需求,以及车列的制动过程是一个非线性变减速过程,为了精确计算得到在常用制动下实时的制动距离,优选的,如图5所示,根据所述定位信息和由速度传感器实时采集的速度信息,计算得到在常用制动下实时的制动距离,包括但不限于有:先根据所述定位信息确定所述车头前端的初始位置,以及根据由速度传感器实时采集的速度信息确定所述车头前端的初始速度;然后以所述初始位置为起点,将位于车头前方的行车路线划分为若干个单位步距(可以但不限于为1米);最后按照如下步骤s621~s625计算得到在常用制动下实时的制动距离:s621.将步距数m初始化为1,然后执行步骤s622;s622.针对沿车组行驶方向位于所述车头前方的第m个单位步距,根据对应的线路条件信息和所述调车机车在常用制动下的制动性能信息,计算得到对应的制动减速度,然后执行步骤s623;s623.针对所述第m个单位步距,根据对应的经过前速度及制动减速度,计算得到对应的经过后速度,然后执行步骤s624,其中,当m为1时,对应的经过前速度为所述初始速度,而当m大于1时,对应的经过前速度为与沿车组行驶方向位于所述车头前方的第m-1个单位步距对应的经过后速度;s624.针对所述第m个单位步距,判断对应的经过后速度是否大于目标速度,若是,则使m自加1,然后返回执行步骤s622,否则执行步骤s625;s625.将m个单位步距的总长度作为在常用制动下实时的制动距离。在前述步骤s621~s625中,所述线路条件信息(例如铁轨的动摩擦系数等)和所述制动性能信息(例如制动作用力的大小等)需提前记录在数据库中,以便实时获取并用于制动减速度计算;所述制动减速度
的具体计算方式为现有算法;默认在单位步距内的变减速过程为线性匀减速过程,因此针对所述第m个单位步距,对应的经过后速度等于对应的经过前速度减去对应的制动减速度;所述目标速度可以但不限于为零。
106.s63.判断所述制动距离是否大于所述目标距离。
107.s64.当判定所述制动距离大于所述目标距离时,通过人机交互界面输出展示报警信息,以及向所述调车机车的控制系统发送所述报警信息,以便所述控制系统采取紧急制动措施。
108.在所述步骤s64中,若所述制动距离大于所述目标距离,则表示在常用制动下已无法避免障碍物碰撞事故的发生,需要切换为紧急制动,因此需要触发报警并促使所述控制系统采取紧急制动措施。此外,所述人机交互界面可运用java技术进行搭建,得到如图6所示的且在行车报警状态时进行报警的人机交互界面示例图;所述人机交互界面在输出展示所述报警信息时,优选采用声光报警方式,以便警示司机已触发紧急制动。
109.由此基于上述步骤s61~s64所描述的可能设计一,可以在发现有障碍物的情况下,精确计算得到目标距离及制动距离,进而可基于两者距离的比较结果,精确地触发报警并控制停车,以便更好地适用于专用线调车作业场景。
110.本实施例在前述第一方面的技术方案基础上,还提供了一种在有车前障碍物时具体进行预警的可能设计二,即进行预警,包括但不限于有如下步骤s71~s73。
111.s71.根据所述车头前方物体识别结果和所述点云数据,确定所述车头前端至所述障碍物的目标距离。
112.在所述步骤s71中,具体计算方式可参见前述步骤s611~s613,于此不再赘述。
113.s72.根据所述目标距离、所述定位信息和由速度传感器实时采集的速度信息,生成在常用制动下实时的目标-距离模式曲线,其中,所述速度传感器安装在所述调车机车或所述被推送车组上。
114.在所述步骤s72中,所述速度传感器的具体描述可参见前述步骤s62,于此不再赘述。所述目标-距离模式曲线是一种用于反映列车允许速度与目标距离关系的曲线,其具体反映了列车在各位置的允许速度值,因此通过生成及预警展示,可使调车司机能够依据所述目标-距离模式曲线进行推送调车作业(例如控制列车“贴线运行”),确保能在所述障碍物前停车。同样考虑专用线调车作业场景存在运行速度低、目标距离短以及制动点控制精度要求高的需求,以及车列的制动过程是一个非线性变减速过程,为了精确生成在常用制动下实时的目标-距离模式曲线,优选的,如图7所示,根据所述目标距离、所述定位信息和由速度传感器实时采集的速度信息,生成在常用制动下实时的目标-距离模式曲线,包括但不限于有:先根据所述定位信息确定所述车头前端的初始位置,以及根据由速度传感器实时采集的速度信息确定所述车头前端的初始速度;然后以所述初始位置为起点,将位于车头前方的行车路线划分为若干个单位步距(可以但不限于为1米);最后按照如下步骤s721~s727生成在常用制动下实时的目标-距离模式曲线:s721.将步距数n初始化为1,然后执行步骤s722;s722.针对沿车组行驶方向位于所述车头前方的第n个单位步距,根据所述初始速度和对应的起点位置,计算得到对应的且在常用制动下的所需制动距离,然后执行步骤s723;s723.针对所述第n个单位步距,判断对应的所需制动距离是否小于所述目标距离,若是,则确定对应的经过后速度为所述初始速度,并使n自加1,然后返回执行步骤s722,否
则执行步骤s724;s724.针对所述第n个单位步距,根据对应的线路条件信息和所述调车机车在常用制动下的制动性能信息,计算得到对应的制动减速度,然后执行步骤s725;s725.针对所述第n个单位步距,根据对应的经过前速度及制动减速度,计算得到对应的经过后速度,然后执行步骤s726,其中,当n为1时,对应的经过前速度为所述初始速度,而当n大于1时,对应的经过前速度为与沿车组行驶方向位于所述车头前方的第n-1个单位步距对应的经过后速度;s726.针对所述第n个单位步距,判断对应的经过后速度是否大于目标速度,若是,则使n自加1,然后返回执行步骤s722,否则执行步骤s727;s727.根据沿车组行驶方向位于所述车头前方的前n个单位步距以及n个经过前速度和n个经过后速度,生成在常用制动下实时的目标-距离模式曲线,其中,所述n个经过前速度与所述前n个单位步距一一对应,所述n个经过后速度与所述前n个单位步距一一对应。在前述步骤s721~s727中,所述所需制动距离、所述制动减速度以及所述经过后速度的具体计算方式可参见前述步骤s621~s625,于此不再赘述。为了确保能在所述障碍物前恰好停车,需要设计曲线为先匀速再减速,即针对各个单位步距,若对应的所需制动距离小于所述目标距离,则使对应的经过后速度为所述初始速度,否则根据对应的经过前速度及制动减速度,计算得到对应的经过后速度。此外,所述目标速度同样可以但不限于为零。
115.s73.通过人机交互界面输出展示所述目标-距离模式曲线,以便进行预警。
116.在所述步骤s73中,所述人机交互界面也可运用java技术进行搭建,得到如图8所示的且在匀速行驶状态时进行预警的人机交互界面示例图或者得到如图9所示的且在减速行驶状态时进行预警的人机交互界面示例图。此外,如图8~9所示,还可以在所述人机交互界面上,通过速度仪器表对实际运行速度和参考运行速度进行实时展示,以及通过双显示距离条带和距离数值的方式明确提示所述目标距离,实现更好的预警效果。
117.由此基于上述步骤s71~s73所描述的可能设计二,可以在发现有障碍物的情况下,精确生成目标-距离模式曲线,并通过预警展示该曲线,可使调车司机能够依据曲线进行推送调车作业,确保能在所述障碍物前精准停车,以便更好地适用于专用线调车作业场景。
118.如图10所示,本实施例第二方面提供了一种实现第一方面或在第一方面中任意可能设计所述的铁路专用线推送调车安全预警方法的虚拟装置,适用于布置在调车机车的车载计算机中,包括有依次通信连接的接收模块、转换模块、识别模块、判断模块和响应模块;
119.所述接收模块,用于接收由面阵激光雷达实时采集的点云数据和由定位器实时获取的定位信息,其中,所述面阵激光雷达可拆卸地安装在被推送车组的车头前端,所述被推送车组是指被位于车组行驶方向后方的所述调车机车推动行驶的车组,所述定位器安装在所述调车机车或所述被推送车组上,所述点云数据包含有多个激光发射点至车头前方物体的距离值,所述多个激光发射点位于所述面阵激光雷达的面阵上;
120.所述转换模块,用于将所述点云数据转换为二维图像,其中,所述二维图像的多个像素点与所述多个激光发射点一一对应;
121.所述识别模块,用于将所述二维图像导入基于目标检测算法的且已完成预训练的车头前方物体识别模型,输出得到车头前方物体识别结果;
122.所述判断模块,用于根据所述车头前方物体识别结果、所述定位信息和推送调车作业计划内容,判断在所述被推送车组的行驶方向前方是否存在障碍物;
123.所述响应模块,用于在判定前方存在障碍物时,进行预警或触发报警并控制停车。
124.本实施例第二方面提供的前述装置的工作过程、工作细节和技术效果,可以参见第一方面或第一方面中任意一种可能设计所述的铁路专用线推送调车安全预警方法,于此不再赘述。
125.如图11所示,本实施例第三方面提供了一种应用第一方面或在第一方面中任意可能设计所述铁路专用线推送调车安全预警方法的铁路专用线推送调车安全预警系统,包括有面阵激光雷达、定位器和车载计算机,其中,所述面阵激光雷达可拆卸地安装在被推送车组的车头前端,所述定位器安装在调车机车或所述被推送车组上,所述车载计算机安装在所述调车机车中,所述被推送车组是指被位于车组行驶方向后方的所述调车机车推动行驶的车组;所述面阵激光雷达,用于实时采集点云数据,其中,所述点云数据包含有多个激光发射点至车头前方物体的距离值,所述多个激光发射点位于所述面阵激光雷达的面阵上;所述定位器,用于实时获取所处位置的定位信息;所述车载计算机,分别通信连接所述面阵激光雷达和所述定位器,用于在获取到来自所述面阵激光雷达的点云数据和来自所述定位器的定位信息后,执行如第一方面或在第一方面中任意可能设计所述的铁路专用线推送调车安全预警方法。此外,所述铁路专用线推送调车安全预警系统还可包括有通信连接所述车载计算机的速度传感器,其中,所述速度传感器安装在所述调车机车或所述被推送车组上,用于实时采集车速。
126.本实施例第三方面提供的前述系统的工作过程、工作细节和技术效果,可以参见第一方面或在第一方面中任意可能设计所述的铁路专用线推送调车安全预警方法,于此不再赘述。
127.如图12所示,本实施例第四方面提供了一种执行如第一方面或在第一方面中任意可能设计所述的铁路专用线推送调车安全预警方法的计算机设备,包括有依次通信相连的存储器、处理器和收发器,其中,所述存储器用于存储计算机程序,所述收发器用于收发消息,所述处理器用于读取所述计算机程序,执行如第一方面或在第一方面中任意可能设计所述的铁路专用线推送调车安全预警方法。具体举例的,所述存储器可以但不限于包括随机存取存储器(random-access memory,ram)、只读存储器(read-only memory,rom)、闪存(flash memory)、先进先出存储器(first input first output,fifo)和/或先进后出存储器(first input last output,filo)等等;所述处理器可以但不限于采用型号为stm32f105系列的微处理器。此外,所述计算机设备还可以但不限于包括有电源模块、显示屏和其它必要的部件。
128.本实施例第四方面提供的前述计算机设备的工作过程、工作细节和技术效果,可以参见第一方面或在第一方面中任意可能设计所述的铁路专用线推送调车安全预警方法,于此不再赘述。
129.本实施例第五方面提供了一种存储包含如第一方面或在第一方面中任意可能设计所述的铁路专用线推送调车安全预警方法的指令的计算机可读存储介质,即所述计算机可读存储介质上存储有指令,当所述指令在计算机上运行时,执行如第一方面或在第一方面中任意可能设计所述的铁路专用线推送调车安全预警方法。其中,所述计算机可读存储介质是指存储数据的载体,可以但不限于包括软盘、光盘、硬盘、闪存、优盘和/或记忆棒(memory stick)等计算机可读存储介质,所述计算机可以是通用计算机、专用计算机、计算
机网络或者其他可编程装置。
130.本实施例第五方面提供的前述计算机可读存储介质的工作过程、工作细节和技术效果,可以参见如第一方面或在第一方面中任意可能设计所述的铁路专用线推送调车安全预警方法,于此不再赘述。
131.本实施例第六方面提供了一种包含指令的计算机程序产品,当所述指令在计算机上运行时,使所述计算机执行如第一方面或在第一方面中任意可能设计所述的铁路专用线推送调车安全预警方法。其中,所述计算机可以是通用计算机、专用计算机、计算机网络或者其他可编程装置。
132.最后应说明的是,本发明不局限于上述可选的实施方式,任何人在本发明的启示下都可得出其他各种形式的产品。上述具体实施方式不应理解成对本发明的保护范围的限制,本发明的保护范围应当以权利要求书中界定的为准,并且说明书可以用于解释权利要求书。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1