人体屈伸辅助装置的制作方法
1.本发明涉及一种人体屈伸辅助装置,更具体地,涉及一种辅助装置,其通过存储在佩戴于人体上时由腰部屈曲动作产生的能量并相反地通过在腰部伸展动作中施加能量来辅助屈曲和伸展动作。
背景技术:
2.日常生活中腰部和骨盆的主要动作是前屈或伸展腰部。作为这种人体屈伸动作的代表例,具有坐、立或提起物体的动作。
3.人体的屈伸动作是日常生活中经常发生的动作,并且由于如果腰部受伤会极大地影响生活质量,所以对保护腰部的需求很高。此外,当肌肉和关节受伤或虚弱时,需要协助这些肌肉和关节,以最大程度地减小日常生活中的不适。
4.日本专利第6241863号公开了一种人体屈伸辅助装置。然而,现有技术的问题在于不能主动判定是否进行支撑,因此提供辅助力直到不需要为止。
5.[现有技术文献]
[0006]
[专利文献]
[0007]
日本专利第6241863号
技术实现要素:
[0008]
本发明解决了传统的人体屈曲辅助装置的问题,提供了一种能够主动判定是否辅助腰部动作的人体屈伸辅助装置。
[0009]
一方面,一种人体屈伸辅助装置包括:板簧,所述板簧的至少一部分弯曲,使得所述板簧紧密地贴附到人体的背部;上半身带,所述上半身带设置在板簧的一侧并且被配置为佩戴在人体的上半身上;中心框架,所述中心框架从板簧的下侧在两个方向上延伸至预定长度以支撑人体的骨盆;气体弹簧,所述气体弹簧的两端连接到板簧的后部和中心框架的后部;一对下肢框架,所述一对下肢框架延伸至预定长度并且在中心框架的两侧围绕左右方向的轴可旋转地彼此连接;下肢带,所述下肢带设置在一对下肢框架的每个下侧上并且被配置为固定到腿上;以及变速箱,所述变速箱被配置为选择性地限制下框架的旋转。
[0010]
人体屈伸辅助装置还可以包括:倾斜传感器,所述倾斜传感器被配置为检测上半身的倾斜;负载传感器,所述负载传感器设置在下肢框架的与腿紧密接触的表面上并且被配置为测量压力;以及控制单元,所述控制单元在基于从倾斜传感器和负载传感器测量的信号判定负载被施加于上半身时,控制气体弹簧的伸长和收缩以限制在变速箱中的旋转。
[0011]
变速箱可以被配置为包括棘轮和棘爪,并且包括被配置为调节棘爪的位置的驱动单元。
[0012]
控制单元可以控制驱动单元,使得当控制单元判定负载被施加时棘爪限制棘轮。
[0013]
控制单元可以控制驱动单元,使得当控制单元判定负载未被施加时棘爪不限制棘轮。
[0014]
控制单元可以基于关于人体行走或就坐时施加的负载和倾斜度的信息来判定负载未被施加。
[0015]
人体屈伸辅助装置可以进一步包括:第一支架,所述第一支架在板簧的后表面上向后和向下延伸;以及第二支架,所述第二支架从中心框架朝向后部和上侧延伸,其中,气体弹簧的两个端部可旋转地连接到第一支架和第二支架。
[0016]
板簧可以由被配置为根据上半身的角度可变形的弹性构件构成。
[0017]
上半身带可以包括:一对肩带,所述一对肩带被配置为佩戴在肩上;以及胸带,所述胸带被配置为佩戴在胸上。
[0018]
随着人体的上半身屈曲,板簧可以弯曲,并且气体弹簧可以伸长,当人体上半身直立时,气体弹簧可以被配置为施加板簧的恢复力,并且气体弹簧用于牵引肩带和胸带。
附图说明
[0019]
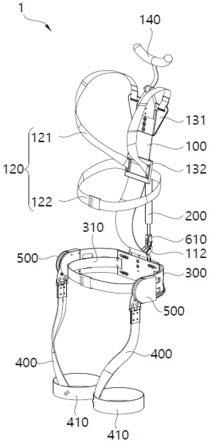
图1是根据本发明的实施例的人体屈伸辅助装置的透视图。
[0020]
图2是根据本发明的实施例的人体屈伸辅助装置的侧视图。
[0021]
图3是根据本发明的实施例的人体屈伸辅助装置的分解透视图。
[0022]
图4是变速箱的局部剖视图。
[0023]
图5a和5b是板簧和气体弹簧的工作状态的图。
[0024]
图6是示出气体弹簧的控制原理的图。
[0025]
图7是下框架自由旋转时的工作状态图。
[0026]
图8是下框架的角度受到限制时的工作状态图。
[0027]
图9是根据本发明的实施例的人体屈伸辅助装置的使用状态图。
[0028]
图10是根据本发明的实施例的人体屈伸辅助装置的另一使用状态图。
具体实施方式
[0029]
在下文中,将参考附图详细描述根据本发明的实施例的人体屈伸辅助装置。在以下实施例的描述中,每个部件的名称可以被称为本领域中的另一个名称。然而,如果这些部件具有相似或相同的功能,即使采用了变型实施例,它们也可以被认为具有等同配置。此外,为了便于描述,对添加到每个部件的附图标记进行了描述。但是,附有这些附图标记的附图中所示的内容并不将各个部件限定在附图的范围内。类似地,即使采用对附图中的配置进行部分修改的实施例,如果这些部件具有功能相似性和相同性,则它们也可以被认为具有等同配置。此外,如果本领域技术人员认识到这些部件是要被包括的部件,则将省略其描述。
[0030]
图1是根据本发明的实施例的人体屈伸辅助装置的透视图,图2是根据本发明的实施例的人体屈伸辅助装置的侧视图,图3是根据本发明的实施例的人体屈伸辅助装置的分解透视图。
[0031]
参考图1和图2,根据本发明的人体屈伸辅助装置1可以被配置成一侧可以佩戴在人体的上侧而另一侧可以佩戴在人体的下肢以进行辅助。
[0032]
根据本发明的人体屈伸辅助装置1可以被配置为包括板簧100、气体弹簧200、上半身带120、头枕140、中心框架300、骨盆带310、下肢框架400、下肢带410、变速箱500、控制单
元600和传感器单元。
[0033]
板簧100被配置为沿着脊椎与背部的至少一部分紧密接触,并且可以被配置为与脊椎的解剖角度相对应的形状。例如,板簧100可以通过使腰部沿凸弯曲路径朝向前侧延伸而形成。板簧100形成为具有预定宽度,但可以确定为具有不与人体的扭转动作干扰的宽度。此外,板簧100可以被确定为具有可具有适当弹性的厚度。
[0034]
气体弹簧200可以被配置为连接到板簧100的两侧,以根据外力的改变与板簧100一起存储能量或传递能量。
[0035]
气体弹簧200可以配置为包括外壳和插入外壳中的活塞。气体弹簧200的一侧可以可旋转地连接到通过从板簧100向下向后延伸而形成的气体弹簧第一支架111。气体弹簧200的另一侧可以可旋转地连接到形成为从稍后描述的中心框架300向后和向上延伸的气体弹簧第二支架112。气体弹簧200可以配置为使得板簧100在初始位置处伸长和收缩,并且可以随着板簧100弯曲而延伸。气体弹簧200可以被配置为使得在活塞伸长的同时压力施加于容纳在气体弹簧中的气体和油并且外力减小到气体弹簧的设定张力以下时,活塞可以缩回并返回其初始位置。在这种情况下,通过将板簧100用作支撑件,基于气体弹簧200的力起作用,因此可以提供牵引力从而用适当的力使上半身展开。
[0036]
同时,在根据弯曲角度相似地保持基于板簧100和气体弹簧200的辅助力(或支撑力)的方便性和稳定性方面是有利的。在这种情况下,由于板簧的恢复力根据弯曲角度而变得更大,因此可以通过利用气体弹簧的收缩力调整作用点的位置以使根据弯曲角度的恢复力的波动最小化。在本发明中,第一支架和第二支架被配置为朝向气体弹簧100的后侧并且沿其端部彼此靠近的方向延伸,以使气体弹簧被连接,从而使根据弯曲角度的辅助力的差异最小化。
[0037]
上半身带120设置在板簧100的上侧并且可以被配置为佩戴在人体的上半身上。上半身带120可以包括肩带121和胸带122。肩带121被配置为一对,并且可以设置连接毂以固定一对肩带121的上侧。连接毂131设置在板簧100的上侧并且可以形成为在左右方向上延伸至预定长度,并且一对肩带121的一侧可以连接到左侧和右侧中的每一个。胸带122通常具有固定在板簧100的中点处的一侧,并且可以被配置为佩戴在人体的胸部的周围。同时,上述的肩带121和胸带122可以被配置为连接为一体,并且也可以应用为使得长度可调整。此外,一侧可以被固定在带滑动件132上,带滑动件132的位置可以在板簧100上滑动的同时被调整。然而,这种带的配置可以以已知和广泛使用的方法来修改并且应用。
[0038]
头枕140设置在板簧的上端部,并且可以被配置为在用户佩戴人体屈伸辅助装置1的同时在向后屈曲动作的过程中支撑头部。头枕140可以被连接为使得可以围绕板簧100和左右方向的轴调节角度。此外,头枕140可以配置为根据高度差来调整头枕的垂直位置。
[0039]
中心框架300可以被配置为在佩戴时支撑骨盆的后侧。上述板簧100的下侧可以被固定地安装在中心框架300的中心部分中。中心框架300可以被配置为前侧敞开的c形。即,中心框架300可以形成为从后部朝向前部从左侧和右侧沿预定曲面延伸。
[0040]
骨盆带310可以设置在中心框架300的左端部和右端部的前侧上,并且可以被配置为在用户佩戴人体屈伸辅助装置1时固定腹部侧。骨盆带310可以被配置为以与左侧和右侧相对应的一对被耦接和连接。然而,这种带的配置可以以各种已知的配置被修改和应用。
[0041]
下肢框架400可以被配置为将支撑力传递到下肢,即大腿。下肢框架400被配置成
一对,并且可以分别围绕左右方向上的轴可旋转地连接到中心框架300的左侧和右侧。下肢框架400通常形成为从中心框架300的左侧和右侧向下延伸,并且可以形成为以三维曲线路径延伸。下肢框架400的一部分可以沿着螺旋路径弯曲,使得其至少一部分可以与大腿的前侧紧密接触。
[0042]
变速箱500设置在下肢框架400和中心框架300的连接部分中,并且可以被配置为通过驱动稍后描述的控制单元600来选择性地调整或限制角度。同时,稍后将参考图4描述变速箱500。
[0043]
下肢带410设置在下肢框架400的下端并且可以被配置为使得用户可以将下肢带410佩戴在下肢即大腿上。因此,在用户佩戴并使用人体屈伸辅助装置1时,可以保持下肢框架400被佩戴在大腿上的位置。
[0044]
控制单元600设置在中心框架300的一侧并且可以被配置为选择性地限制稍后描述的下肢框架400的动作。控制单元600可以被配置为通过基于由稍后描述的传感器单元感测的值来驱动连接到下肢框架400的驱动单元以限制一侧的运动方向。控制单元600可以被配置为包括电源(未示出)和处理器。同时,稍后将描述控制单元600的详细配置。
[0045]
传感器单元可以被配置为检测人体的动作。传感器单元可以被配置为包括倾斜传感器610和负载传感器620。传感器单元可以测量上半身的角度和角度的变化量并且将它们传递到控制单元600。此外,负载传感器620可以被配置为设置在下肢框架400的与大腿紧密接触的部分上以测量压力。倾斜传感器610可以设置为各种公知配置,例如陀螺仪传感器和加速度传感器。此外,负载传感器620可以被配置为能够测量压力或力的各种公知配置。
[0046]
同时,可以设置将传感器单元、控制单元600和驱动单元连接的导线。导线的至少一部分可以沿着下肢框架400或中心框架300设置。
[0047]
在下文中,将参考图4详细描述变速箱500。
[0048]
图4是变速箱500的局部剖视图。在图4中,将对用户佩戴时设置在人体屈伸辅助装置1的左侧上的变速箱500进行描述,但变速箱500可以对称地设置在右侧,并且将省略其描述。
[0049]
参考图4,变速箱500可以设置在下肢框架400与中心框架300之间的连接部处。变速箱500可以被配置为包括棘轮裙(ratchet gear skirt)510、棘轮轴520、棘轮、棘爪540、驱动单元和手动控制旋钮560。
[0050]
棘轮裙510可以被配置为连接到棘轮530并且与棘轮530一起旋转。棘轮裙510形成为延伸至预定长度,其上侧可以连接到棘轮530,其下侧可以可旋转地连接到下肢框架400。铰链可以可旋转地设置在棘轮裙510与下肢框架400之间。铰链可以被配置为使得下肢框架400围绕前后方向的轴相对可旋转地与棘轮裙510连接。因此,当用户在左右方向上加宽或缩窄下肢时,下肢框架400在左右方向上的角度可以被没有阻力地自然地调整。另一方面,垂直方向上的支撑力可以通过棘轮裙510传递。
[0051]
棘轮轴520被配置为使得棘轮530可以在中心轴上围绕左右方向上的轴旋转。棘轮530可以具有预定长度并且可以可旋转地连接到棘轮轴520和主轴中的至少一个。
[0052]
棘轮可以被配置为具有预定的外径,并且可以被配置为与棘爪540一起工作以允许沿一个方向旋转,但约束另一个方向。棘轮530的允许旋转方向可以被确定为当用户佩戴人体屈伸辅助装置1时用户向后移动大腿的方向。反之,向前移动大腿的方向被棘爪限制使
得棘轮530可以被配置为不旋转。在这种情况下,当下半身被固定时,腰部屈曲的方向上的动作被限制,并且腰部伸展的方向上的动作可自由地进行。
[0053]
棘爪540可以被配置为与上述棘轮530相互作用以确定棘轮530的旋转方向。棘爪540可以可旋转地连接到变速箱500上的一点。棘爪540的一侧与稍后描述的双向螺线管550连接,从而可以执行或释放与棘轮530啮合的动作。即,当棘爪540的角度被调整并且棘爪540不与棘轮530接触时,棘轮530可以自由地旋转,而当棘爪540的角度被调整为接触棘轮530时,如上所述,下肢框架400仅在一个方向上可旋转。
[0054]
驱动单元可以被配置为通过控制单元600的控制输入而被调整到两个位置。驱动单元例如可以配置为双向螺线管550。双向螺线管550连接到棘爪540的一侧以通过外部控制输入来选择性地调整棘爪540的位置。因此,可以执行或释放与棘轮530的作用。双向螺线管550可以具有设置在其中的柱塞并且可以沿工作方向移动。柱塞的一侧形成为沿操作方向延伸,并且可以可旋转地连接到棘爪540的一侧。
[0055]
手动控制旋钮560可以连接到上述柱塞的另一侧。手动控制旋钮560可以被配置为延伸到预定长度以暴露于变速箱500的外部。即使在没有单独的控制输入的情况下,用户也可以通过选择性地拉动或推动手动控制旋钮560来调整棘爪540的位置。也就是说,可以手动地限制或释放棘轮530的旋转方向。
[0056]
在下文中,将参考图5a至图5b描述在根据本发明的人体屈伸辅助装置1中提供辅助力时的动作。为了便于说明,在侧视图中仅示出了板簧100和气体弹簧200,省略了其余部件。
[0057]
图5a和图5b是板簧100和气体弹簧200的工作状态图。
[0058]
参考图5a,示出了未施加外力时的初始状态。在这种情况下,板簧100可以被配置为适当地附接到上半身的背部的屈曲处。
[0059]
参考图5b,当用户在中心框架300被固定时屈曲上半身时,板簧100沿上半身向前弯曲,并且气体弹簧200在伸长以存储能量的同时也存储能量。在这种情况下,板簧100响应于上半身的屈曲而适当地变形的同时将支撑力传递到背部。板簧100和气体弹簧200提供恢复力以使存储的能量复原到图5a的状态。板簧100通过其弹性提供恢复力,并且气体弹簧200在伸长和收缩的同时传递恢复力。在这种情况下,气体弹簧第一支架111和气体弹簧第二支架112与板簧100间隔开预定距离并且朝向彼此延伸以确定从气体弹簧200传递力的点。此外,由于气体弹簧200连接到气体弹簧第一支架111和气体弹簧第二支架112的点与板簧100隔开预定距离,因此在板簧100中产生扭矩,从而辅助用户的腰部伸展动作。此时产生的恢复力可以通过肩带121和胸带122传递到上半身。
[0060]
图6是示出气体弹簧的控制原理的图。
[0061]
参考图6,气体弹簧可以设置为具有锁定功能的张力气体弹簧。即,在气体弹簧伸展之后,气体弹簧可以被配置为当在汽缸内沿相反方向施加力时通过阻塞流路而被锁定。作为示例,可以设置引导轴201,引导轴201被配置为在活塞插设在两个腔室之间的情况下选择性地阻塞两个腔室之间的流路,即形成在活塞上的流路。在引导轴的下侧设置螺线管,引导轴的位置可以在控制器的控制下调整。因此,当气体弹簧200伸展时自动进行锁定,然后,当气体弹簧200返回到其初始位置时,控制单元操作螺线管来推动引导轴201以解锁气体弹簧。因此,可以根据控制器的判定来主动地判定由气体弹簧施加张力的时间。在这种情
况下,当用户屈曲腰部时,气体弹簧200不会立即施加可使腰部伸展的支撑力,并且当判定控制单元执行用户伸展腰部的操作时,存储在气体弹簧200中的张力被施加,从而可以传递辅助伸展腰部的力。
[0062]
在下文中,将参考图7至图8详细描述控制单元600和下肢框架400的操作。在图7和图8中,将对下肢框架400的位置被固定时调整板簧100的角度的假设进行描述。此外,还示出了表示在图7和图8所示的状态下变速箱500的内部状态的局部放大图。
[0063]
图7是下肢框架400自由转动时的操作状态图,图8是下肢框架400的角度受到限制时的操作状态图。
[0064]
参考图7,示出了当用户坐在诸如椅子的结构上时的操作状态。当用户坐在椅子上时,需要采取坐姿,即下肢从上半身以一定角度向前屈曲的操作,在这种情况下不需要很大的支撑力。因此,控制单元600操作螺线管550以释放棘爪540与棘轮530之间的连接,并且控制下肢框架400从中心框架300自由地可旋转。同时,控制单元600可以接收倾斜传感器610和负载传感器620的值并且判定当前用户是处于坐姿、站立姿态还是提起物体姿态。作为示例,当负载传感器620的值小于或等于预定值,上半身的倾斜度以预定角度弯曲,并且即将降低时,控制单元600可以判定是就坐过程。因此,在这种情况下,自由地控制下肢框架400的旋转。
[0065]
参考图8,控制单元600基于倾斜传感器610和负载传感器620的测量值来判定用户是否是站立动作和提起物体动作,并且包含棘轮530的旋转角度使得支撑力可以被传递。控制单元600使螺线管550致动以传递支撑力并且使棘爪540与棘轮530啮合。因此,用于伸展上半身的恢复力,即由板簧100和气体弹簧200施加的恢复力基于下肢框架400和中心框架300施加于伸展板簧100的方向上。在这种情况下,施加于用户的恢复力同时由与骨盆侧紧密接触的中心框架300以及与下肢紧密接触的下肢框架400支撑和施加。因此,可以分散支撑力并实现稳定的支撑。
[0066]
同时,控制单元600基于倾斜传感器610的角度是由诸如屈曲然后伸展上半身的一般的站立动作产生的值这样的情况来控制螺线管550,以使棘爪540与棘轮530啮合。
[0067]
在下文中,将参考图9至图10描述根据本发明的人体屈伸辅助装置1的使用示例。
[0068]
图9是根据本发明的实施例的人体屈伸辅助装置1的使用状态图。
[0069]
参考图9,当判定用户正在行走时,控制单元600可以控制螺线管550以释放棘爪540与棘轮530之间的关联。在这种情况下,控制单元600在从负载传感器620测量的值小于或等于预定值并且倾斜传感器610的值大于或等于预定值时,即,基于从一般的行走动作测量的数据,判定用户当前正在行走。在这种情况下,棘轮530的旋转不受限制,因此人体屈曲辅助装置1不传递支撑力,因此用户可以自由地移动下半身并行走。
[0070]
图10是根据本发明的实施例的人体屈伸辅助装置1的另一使用状态图。
[0071]
参考图10,当从倾斜传感器610测得的值大于或等于某个值时,控制单元600判定用户将上半身屈曲地就坐或提起物体而不行走,并且操作螺线管550以使棘爪540与棘轮530啮合。也就是说,棘轮被锁定,使得它仅能沿一个方向旋转。在棘轮被固定的状态下人体的屈曲通过使板簧100弯曲而被存储为弹性排斥力,并且通过同时扩展气体弹簧200而被存储为张力。在这种情况下,处于伸长状态的气体弹簧可以被锁定。另一方面,在提起物体时,传递到上半身的负载通过肩带121和胸带122传递到板簧100,并且也传递到中心框架300和
下肢框架400。其结果,由于设置在下肢框架400与大腿之间的负载传感器620的值增加,所以控制单元600可以基于此来判定人体是否屈曲。
[0072]
控制单元600判定它是人体的向前屈曲动作,即物体提起动作,以操作气体弹簧控制螺线管630来释放气体弹簧的锁定并施加张力。因此,施加支撑力使得用户的上半身不会基于下半身而进一步屈曲。即,当提起物体时,可以施加保持物体以免下降到提起高度以下的支撑力。在用户的腰部伸展动作中,用户可以通过由用户施加的力、由板簧100和气体弹簧200牵引上半身的力来伸展上半身,并且当基于板簧100和气体弹簧200的牵引力被移除时,棘爪540使得棘轮530能够旋转并且下框架的移动变得自由。
[0073]
另一方面,在上述图7至图10中,已经描述了下肢框架400的旋转方向被控制单元600限制的示例,但是用户可以通过推动或拉动暴露于变速箱500的手动控制旋钮560来手动限制棘轮530的旋转方向。
[0074]
如上所述,根据基于本发明的人体屈伸辅助装置,可以通过腰部屈曲动作来存储能量,相反地,通过将能量传递到腰部来辅助人体进行伸展动作。
[0075]
此外,可以判定人体的当前动作,判定辅助力被传递到下半身的时间,并且在不需要辅助力时通过自由地移动下半身来最小化不适。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1