一种人体运动角度测量方法
1.本发明涉及人体运动学技术领域,具体而言,涉及一种人体运动角度测量方法。
背景技术:
2.人体的动作描述、检测、识别方法以及相应装置在康复、健身、医学、娱乐等领域有重要的作用。
3.人体的上肢(肩部复合体、肱骨、前臂以及手)是人体重要组成部分,人体的灵活性极大的体现在上肢的灵活性上,所以上肢运动角度是近些年来广大学者所关注的研究内容,而人体上肢的复杂性为上肢运动角度的测量带来了极大的挑战。目前上肢运动角度的测量方法从大类上主要分为三种:机械装置测量、软传感器(例如介电弹性体传感器)测量、可穿戴装置测量、电磁式测量、信号和机器视觉的估算。
4.然而,通过机械式方法测量最大的弊端就是数据是由人来读取,存在客观误差,并且一些复杂的测量设备不易搬运和操作,极大的限制了测量装置的使用,通常机械式测量设备的成本较高。对于基于信号和机器视觉的估算方法,运动角度是“估算”得来,准确性方面存在较大误差,同时需要在研发前进行大量的实验来建立数据库,可见测量过程很繁琐。对于采用软传感器测量,将软传感器粘贴到人体关节位置操作很繁琐,软传感器的成本较高,经过长时间测量后,软传感器的位置容易发生偏移,影响稳定性和准确度。
技术实现要素:
5.本发明就是为了解决现有人体上肢运动角度测量方法成本高、测量操作不方便,测量过程繁琐,准确度低,稳定性差的技术问题,提供了一种成本低、操作方便,测量过程简易,稳定性好,准确度高的人体运动角度测量方法。
6.本发明提供一种人体运动角度测量方法,包括以下步骤:
7.第一步,胸锁关节作为点3,肩锁关节作为点4;
8.第二步,获取点3、点4的空间坐标值,点3的空间坐标值是p3(x3,y3,z3),点4的空间坐标值是p4(x4,y4,z4);
9.第三步,点3和点4之间形成线段l
3,4
,由空间点坐标值p3和p4计算得出线段l
3,4
的线段长度l
3,4
,定义虚拟点1,虚拟点1和点3形成线段l
1,3
,线段l
1,3
的长度是l
1,3
,并且l
1,3
=l
3,4
,并且l
1,3
⊥
l
3,4
,并且线段l
1,3
在y-z平面内,由此计算得到虚拟点1的空间坐标值;
10.第四步,通过点1、点3、点4构成一个空间三角形
△
1,3,4
,计算线段l
1,3
与线段l
3,4
之间的夹角∠1,3,4就得出锁骨绕x轴旋转的转角θ1。
11.本发明还提供人体运动角度测量方法,包括以下步骤:
12.第一步,胸锁关节作为点3,肩锁关节作为点4;
13.第二步,获取点3、点4的空间坐标值,点3的空间坐标值是p3(x3,y3,z3),点4的空间坐标值是p4(x4,y4,z4);
14.第三步,点3和点4之间形成线段l
3,4
,由空间点坐标值p3和p4计算得出线段l
3,4
的线
段长度l
3,4
,定义虚拟点2,虚拟点2和点3形成线段l
2,3
,线段l
2,3
的长度是l
2,3
,并且l
2,3
=l
3,4
,并且l
2,3
⊥
l
3,4
,并且线段l
2,3
在x-y平面内,由此计算得出虚拟点2的空间坐标值;
15.第四步,通过点2、点3、点4构成一个空间三角形
△
2,3,4
,计算线段l
2,3
与线段l
3,4
之间的夹角∠2,3,4就得出锁骨绕z轴旋转的转角θ2。
16.本发明还提供一种人体运动角度测量方法,包括以下步骤:
17.第一步,盂肱关节作为点8,肘关节作为点9;
18.第二步,获取点8、点9的空间坐标值,点8的空间坐标值是p8(x8,y8,z8),点9的空间坐标值是p9(x9,y9,z9);
19.第三步,点8和点9之间形成线段l
8,9
,由空间点坐标值p8和p9计算得出线段l
8,9
的线段长度l
8,9
,定义虚拟点5,虚拟点5和点8形成线段l
5,8
,线段l
5,8
的长度为l
5,8
,并且l
5,8
=l
8,9
,并且线段l
5,8
始终与x-y平面平行,并且线段l
5,8
始终与x-z平面平行,由此计算得到虚拟点5的空间坐标值;
20.第四步,通过点5、点8、点9构成一个空间三角形
△
5,8,9
,计算空间三角形
△
5,8,9
所在平面与x-z平面的夹角就得出肱骨绕x轴的转角θ3。
21.本发明还提供一种人体运动角度测量方法,包括以下步骤:
22.第一步,盂肱关节作为点8,肘关节作为点9;
23.第二步,获取点8、点9的空间坐标值,点8的空间坐标值是p8(x8,y8,z8),点9的空间坐标值是p9(x9,y9,z9);
24.第三步,点8和点9之间形成线段l
8,9
,由空间点坐标值p8和p9计算得出线段l
8,9
的线段长度l
8,9
,定义虚拟点6,虚拟点6和点8形成线段l
6,8
,线段l
6,8
的长度为l
6,8
,并且l
6,8
=l
8,9
,并且线段l
6,8
始终与x-y平面平行,并且线段l
6,8
始终与y-z平面平行,由此计算得到虚拟点6的空间坐标值;
25.第四步,通过点6、点8、点9构成一个空间三角形
△
6,8
,9,计算空间三角形
△
6,8,9
所在平面与x-y平面的夹角就得出肱骨绕y轴的转角θ4。
26.本发明还提供一种人体运动角度测量方法,包括以下步骤:
27.第一步,盂肱关节作为点8,肘关节作为点9;
28.第二步,获取点8、点9的空间坐标值,点8的空间坐标值是p8(x8,y8,z8),点9的空间坐标值是p9(x9,y9,z9);
29.第三步,点8和点9之间形成线段l
8,9
,由空间点坐标值p8和p9计算得出线段l
8,9
的线段长度l
8,9
,定义虚拟点7,虚拟点7与点8形成线段l
7,8
,线段l
7,8
的长度为l
7,8
,并且l
7,8
=l
8,9
,并且线段l
7,8
始终与x-z平面平行,并且线段l
7,8
始终与y-z平面平行,由此计算得到虚拟点7的空间坐标值;
30.第四步,通过点7、点8、点9构成一个空间三角形
△
7,8,9
,计算空间三角形
△
7,8,9
所在平面与y-z平面的夹角就得出肱骨绕z轴的转角θ5。
31.本发明还提供一种人体运动角度测量方法,包括以下步骤:
32.第一步,盂肱关节作为点8,肘关节作为点9,腕关节作为点10;
33.第二步,获取点8、点9、点10的空间坐标值,点8的空间坐标值是p8(x8,y8,z8),点9的空间坐标值是p9(x9,y9,z9),点10的空间坐标值是p
10
(x
10
,y
10
,z
10
);
34.第三步,通过点8、点9、点10构成一个空间三角形
△
8,9,10
,计算线段l
8,9
与线段l
9,10
之间的夹角∠8,9,10就得出肘关节的转角θ6。
35.本发明还提供一种人体运动角度测量方法,包括以下步骤:
36.第一步,腕关节作为点10,手掌的第三根掌骨关节作为点12;
37.第二步,获取点10、点12的空间坐标值,点10的空间坐标值是p
10
(x
10
,y
10
,z
10
),点12的空间坐标值是p
12
(x
12
,y
12
,z
12
);
38.第三步,点10和点12之间形成线段l
10,12
,由空间点坐标值p
10
和p
12
计算得出线段l
10,12
的线段长度l
10,12
,定义虚拟点11,虚拟点11与点10形成线段l
10,11
,线段l
10,11
的长度是l
10,11
,l
10,11
=l
10,12
,并且l
10,11
⊥
l
9,10
,并且点11和点10在同一x-y平面内,由此计算出虚拟点11的空间坐标值;
39.第四步,通过点10、点11、点12构成一个空间三角形
△
10,11,12
,计算线段l
10,11
与线段l
10,12
之间的夹角∠11,10,12就得出腕关节的转角θ7。
40.本发明还提供一种人体运动角度测量方法,包括以下步骤:
41.第一步,肘关节作为点9,腕关节作为点10,手掌的第三根掌骨关节作为点12;
42.第二步,获取点9、10、点12的空间坐标值,点9的空间坐标值是p9(x9,y9,z9),点10的空间坐标值是p
10
(x
10
,y
10
,z
10
),点12的空间坐标值是p
12
(x
12
,y
12
,z
12
);
43.第三步,通过点9、10、12构成一个空间三角形
△
9,10,12
,计算线段l
9,10
与线段l
9,12
之间的夹角∠9,10,12就能得到θ7。
44.本发明还提供一种人体运动角度测量方法,包括以下步骤:
45.第一步,胸锁关节作为点3,肩锁关节作为点4;
46.第二步,获取点3、点4的空间坐标值,点3的空间坐标值是p3(x3,y3,z3),点4的空间坐标值是p4(x4,y4,z4);
47.第三步,点3和点4之间形成线段l
3,4
,计算线段l
3,4
的空间矢量再计算空间矢量绕x轴的转动角度就能得锁骨绕x轴旋转的转角θ1。
48.本发明还提供一种人体运动角度测量方法,包括以下步骤:
49.步骤1,以人体的两个关节作为两个实点;
50.步骤2,根据两个实点确定一个虚拟点;
51.步骤3,通过两个实点和一个虚拟点构成一个空间三角形;
52.步骤4,计算空间三角形两个线段之间的夹角从而计算出人体运动角度。
53.本发明的有益效果是:公开了一种全新的、不同于现有技术构思的人体运动测量方法,测量过程简易、操作方便,成本低,稳定性好。
54.只需要一个传感器获取点3、点4、点8、点9、点10、点12这六个实点的空间坐标值,就可以完成角度的测量,不需要复杂的机械结构和相应的设备。
55.测量精确度高。测量过程不需要事先建立数据库,也不需要通过大量的数据训练模型。
56.本发明的测量过程只涉及坐标点和三角形的解算,因此具备较高的运算速度,同时在应用时,相应的具备良好的实时性。
57.不需要通过繁杂的机械结构、不用进行估计以及解算更多上肢运动自由度的方法,以更好的重现上肢真实运动情况,为上肢临床诊断及上肢康复等领域提供人体上肢角
度信息。
58.本发明进一步的特征和方面,将在以下参考附图的具体实施方式的描述中,得以清楚地记载。
附图说明
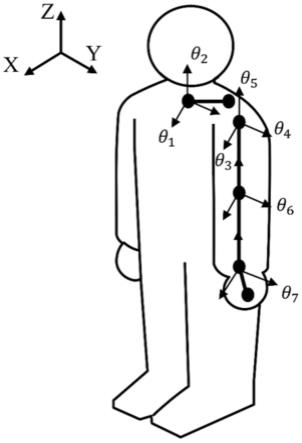
59.图1是人体的上肢的7自由度运动角度示意图;
60.图2是从人体的上肢各关节选取检测点的示意图;
61.图3是构建出虚拟点已经形成的空间三角形示意图。
62.图中符号说明:
63.图3中,1处圆圈表示虚拟点1,2处圆圈表示虚拟点2,5处圆圈表示虚拟点5,6处圆圈表示虚拟点6,7处圆圈表示虚拟点7,11处圆圈表示虚拟点11。
具体实施方式
64.以下参照附图,以具体实施例对本发明作进一步详细说明。
65.如图1所示,人体的上肢处于初始状态,初始状态下,肩膀放松,手臂自然下垂,手掌紧贴大腿外侧。此时,锁骨绕x轴旋转的转角为θ1,旋转轴为x轴;锁骨绕z轴旋转的转角为θ2,旋转轴为z轴。肱骨绕x轴旋转的转角为θ3,旋转轴为x轴;肱骨绕y轴旋转的转角为θ4,旋转轴为y轴;肱骨绕z轴旋转的转角为θ5,旋转轴为z轴。肘关节的旋转角度为θ6,旋转轴为肘关节处的y轴。腕关节的旋转角度为θ7,旋转轴为腕关节处的x轴。
66.如图2所示,定义身体上位于特定关节处的六个空间点(这六个空间点为实点),分别是:胸锁关节作为点3,肩锁关节作为点4,盂肱关节作为点8,肘关节作为点9,腕关节作为点10,手掌的第三根掌骨关节作为点12。
67.获取点3、点4、点8、点9、点10、点12的空间坐标值,采用深度摄像头或运动捕捉系统(基于光学和磁等)等其他技术手段获取这六个点的空间坐标,本发明以光学运动捕捉系统为例,获取这六个点的空间坐标值:在胸锁关节、肩锁关节、盂肱关节、肘关节、腕关节处分别贴上反光标记点,在光学运动捕捉系统下获取反光标记点的空间坐标的原始数据,而后进行滤波和缺失点的插补,最终得到点3、点4、点8、点9、点10、点12的空间坐标值。点3的空间坐标值是p3(x3,y3,z3),点4的空间坐标值是p4(x4,y4,z4),点8的空间坐标值是p8(x8,y8,z8),点9的空间坐标值是p9(x9,y9,z9),点10的空间坐标值是p
10
(x
10
,y
10
,z
10
),点12的空间坐标值是p
12
(x
12
,y
12
,z
12
)。
68.如图3所示,确定位于身体以外的空间点:点1、2、5、6、7、11,点1、2、5、6、7、11为虚拟点。六个虚点的空间坐标值通过以下计算过程得到:
69.虚拟点1和2的空间坐标值在初始状态(肩膀放松,手臂自然下垂,手掌紧贴大腿外侧)下确定,在初始状态下,点3和点4之间形成线段l
3,4
,由空间点坐标值p3和p4计算得出线段l
3,4
的线段长度l
3,4
,定义虚拟点1,虚拟点1和点3形成线段l
1,3
,线段l
1,3
的长度是l
1,3
,并且长度l
1,3
与长度l
3,4
相等,即l
1,3
=l
3,4
,并且线段l
1,3
与线段l
3,4
垂直,即垂直关系l
1,3
⊥
l
3,4
,并且线段l
1,3
在y-z平面内,由此计算得到虚拟点1的空间坐标值,确定的虚拟点1是唯一的,虚拟点1的空间坐标值永远不变。定义虚拟点2,虚拟点2和点3形成线段l
2,3
,线段l
2,3
的长度是l
2,3
,并且长度是l
2,3
和长度l
3,4
相等,即l
2,3
=l
3,4
,并且线段l
2,3
与线段l
3,4
垂直,即
垂直关系l
2,3
⊥
l
3,4
,并且线段l
2,3
在x-y平面内,由此计算得出虚拟点2的空间坐标值,确定的虚拟点2点是唯一的,虚拟点2的空间坐标值永远不变。
70.点8和点9之间形成线段l
8,9
,由空间点坐标值p8和p9计算得出线段l
8,9
的线段长度l
8,9
,定义虚拟点5,虚拟点5和点8形成线段l
5,8
,线段l
5,8
的长度为l
5,8
,并且长度为l
5,8
与长度l
8,9
相等,即l
5,8
=l
8,9
,并且线段l
5,8
始终与x-y平面平行,线段l
5,8
始终与x-z平面平行,由此计算得到虚拟点5的空间坐标值,虚拟点5是动点,虚拟点5的空间坐标值是随着人体上肢运动而变化。定义虚拟点6,虚拟点6和点8形成线段l
6,8
,线段l
6,8
的长度为l
6,8
,并且长度为l
6,8
与长度l
8,9
相等,即l
6,8
=l
8,9
,并且线段l
6,8
始终与x-y平面平行,并且线段l
6,8
始终与y-z平面平行,由此计算得到虚拟点6的空间坐标值。虚拟点6是动点,虚拟点6的空间坐标值是随着人体上肢运动而变化。定义虚拟点7,虚拟点7与点8形成线段l
7,8
,线段l
7,8
的长度为l
7,8
,并且长度l
7,8
与长度l
8,9
相等,即l
7,8
=l
8,9
,并且线段l
7,8
始终与x-z平面平行,并且线段l
7,8
始终与y-z平面平行,由此计算得到虚拟点7的空间坐标值。虚拟点7是动点,虚拟点7的空间坐标值随着人体上肢运动而变化。
71.点10和点12之间形成线段l
10,12
,由空间点坐标值p
10
和p
12
计算得出线段l
10,12
的线段长度l
10,12
,定义虚拟点11,虚拟点11与点10形成线段l
10,11
,线段l
10,11
的长度是l
10,11
,长度l
10,11
与长度l
10,12
的相等,即l
10,11
=l
10,12
,并且线段l
10,11
与线段l
9,10
垂直,即垂直关系l
10,11
⊥
l
9,10
,并且点11和点10在同一x-y平面内,由此计算出虚拟点11的空间坐标值。虚拟点11是动点,虚拟点11的空间坐标值随着人体上肢运动而变化。
72.至此,完成点1、2、5、6、7、11这六个虚拟点的空间坐标值的计算。
73.得到虚拟点1和虚拟点2的空间坐标值后,通过点1、点3、点4构成一个空间三角形
△
1,3,4
,计算线段l
1,3
与线段l
3,4
之间的夹角∠1,3,4就得出锁骨绕x轴旋转的转角θ1;计算θ1的过程中,虚拟点1的空间坐标值是定值。通过点2、3、4构成一个空间三角形
△
2,3,4
,计算段线段l
2,3
与线段l
3,4
之间的夹角∠2,3,4就得出锁骨绕z轴旋转的转角θ2。
74.得到虚拟点5的空间坐标值后,通过点5、点8、点9构成一个空间三角形
△
5,8,9
,计算空间三角形
△
5,8,9
所在平面与x-z平面的夹角就得出肱骨绕x轴的转角θ3。
75.得到虚拟点6的空间坐标值后,通过点6、点8、点9构成一个空间三角形
△
6,8,9
,计算空间三角形
△
6,8,9
所在平面与x-y平面的夹角就得出肱骨绕y轴的转角θ4。
76.得到虚拟点7的空间坐标值后,通过点7、点8、点9构成一个空间三角形
△
7,8,9
,计算空间三角形
△
7,8,9
所在平面与y-z平面的夹角就得出肱骨绕z轴的转角θ5。
77.得到虚拟点11的空间坐标值后,通过点10、点11、点12构成一个空间三角形
△
10,11,12
,计算线段l
10,11
与线段l
10,12
之间的夹角∠11,10,12就得出腕关节的转角θ7。
78.得到点8、9、10的空间坐标值后,通过点8、点9、点10构成一个空间三角形
△
8,9,10
,计算线段l
8,9
与线段l
9,10
之间的夹角∠8,9,10就得出肘关节的转角θ6。
79.可见,本发明将θ1、θ2、θ6、θ7引入到相应的空间三角形中解算,且在每一个空间三角形中,有且只有一条边为变量,故得到的θ1、θ2、θ6、θ7具有很高的精度,将θ3、θ4、θ5引入到平面夹角中解算,且相应的每对平面夹角有且只有一个夹角为变量,故得到的θ3、θ4、θ5具有很高的精度。因此解算出的上肢7个自由度运动角度与现有通过“估算”方法计算得到的结果相比,理论上具备更高的精度,且不需要建立数据库,也不需要通过大量的数据训练模型。
80.需要说明的是,对于锁骨绕x轴旋转的转角θ1,得到点3、4的空间坐标值后,计算线段l
3,4
的空间矢量再计算空间矢量绕x轴的转动角度就能得到θ1。对于锁骨绕z轴旋转的转角θ2,得到点3、4的空间坐标值后,计算线段l
3,4
的空间矢量再计算空间矢量绕z轴的转动角度就能得到θ2。
81.需要说明的是,对于腕关节的转角θ7,通过点9、10、12构成一个空间三角形
△
9,10,12
,计算线段l
9,10
与线段l
9,12
之间的夹角∠9,10,12就能得到θ7。
82.以上所述仅对本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1