手臂关节康复训练理疗机及设计方法与流程
1.本发明属于医疗辅助设备技术领域,具体涉及一种手臂关节康复训练理疗机。
背景技术:
2.目前老龄化速度加快,老年人越来越来越多,由于缺乏锻炼,老年人的肩膀、手臂经常会出现酸、疼、痛等现象,这给他们的生活带来了巨大的痛苦。当前,大多数老年人一般借助传统手臂关节训练装置来训练肩关节、肘关节及腕关节,训练方式均为主动式,运动轨迹仅为圆周运动或上下运动,运动形式较为单一,且装置的高度已经固定,不能根据需要调节,设备一般安装在公共场所,数量有限,已不能满足训练者的训练要求,因此开发一种具有多种运动形式的手臂关节训练理疗机显得非常迫切。未来,随着老龄化速度的进一步加快,该种理疗机将在市场上将会非常受欢迎,具有广阔的市场前景。
技术实现要素:
3.针对现有技术中存在的问题,本发明设计的目的在于提供一种手臂关节康复训练理疗机,该理疗机能实现多种曲线运动,满足人体手臂不同关节锻炼的需要。
4.本发明通过以下技术方案加以实现:
5.所述的手臂关节康复训练理疗机,其特征在于该康复训练理疗机包括:
6.底座:其上竖直设置有支杆,所述支杆上滑动设置有平面四连杆机构;;
7.平面四连杆机构:包括首尾依次铰接设置的曲柄、连杆、摇杆及支架,且所述支架与曲柄连接的一端上安装有驱动电机,所述驱动电机的输出轴与曲柄的一端相连;
8.平移机构:包括沿支杆高度方向设置的导轨、与导轨配合使用的滑块,所述滑块固定设置在支架上;
9.控制系统:包括plc控制器及与plc控制器电连接的触摸屏,所述触摸屏上设置有启动、停止及复位按键、设置有红蓝绿指示灯指示机器工作状态,触摸屏上还设置有计数功能界面,计数既可累加也可清零,动态显示训练者训练次数。
10.进一步地,连杆及曲柄上均设置有不同的位置孔,用于调整连杆及曲柄的的长度。
11.进一步地,摇杆长度为600mm,支架长度为800mm,对应曲柄及连杆的长度分为三组。
12.进一步地,三组曲柄和连杆长度分别为:曲柄长425m,连杆长 680m,摇杆摆角为90
°
;曲柄长350m,连杆长635m,摇杆摆角为71.4
°
;曲柄长250m,连杆长585m,摇杆摆角为49.2
°
。
13.进一步地,平面四连杆机构在1.4m-1.8m范围内任意调整高度。
14.进一步地,连杆及曲柄上的位置孔包括端部位置孔和中间位置孔,所述连杆和曲柄上的中间位置孔均设置有三个。
15.进一步地,连杆和曲柄上的位置孔之间通过销子轴进行连接。
16.进一步地,驱动电机转速为15r/min。
17.所述的手臂关节康复训练理疗机的设计方法,其特征在于该设计方法为:
18.1)平面四杆机构的设置:首尾铰接设置曲柄(3)、连杆(4)、摇杆(5)及支架(6)构成平面四杆机构,其中曲柄(3)、连杆(4)、摇杆(5)及支架(6)的长度分别为l1、l2、l3和l4,其中,曲柄 l1作圆周运动,摇杆l3作圆弧运动,连杆l2上面的点作近似椭圆运动;
19.2)根据曲柄摇杆机构工作原理,建立杆件矢量方程,曲柄与支架交接点为a,曲柄与连杆的交接点为b,连杆与摇杆的交接点为c,摇杆与支架的交接点为d:
[0020][0021]
根据杆件矢量方程(1)求解位移方程:
[0022][0023]
其中b点坐标:
[0024]
由(2)式位移方程对时间t求导得到杆件速度方程:
[0025][0026]
求解得速度:
[0027][0028]
由方程(3)对时间t求导,得到加速方程:
[0029][0030]
令:
[0031]
求解得加速度:
[0032][0033]
3)在ug nx中建立人体模型,根据曲柄摇杆机构的特点,当极位夹角θ=0
°
时,行程速比系数k=1,此时机构在工作行程阶段与空回行程阶段的平均速度相等,亦即机构具有无急回运动特性,
[0034][0035]
四杆机构无急回运动特性的条件为:
[0036][0037]
根据上述条件作曲柄摇杆机构简图。
[0038]
本发明改变传统手臂关节训练装置主动式训练为被动式训练,机械结构简单,运
动形式多样,参数可调,便于训练者根据需要进行选择,四连杆长度参数的选择,实现不同的运动方式,训练者只需抓住连杆上的手柄,手臂就会被动作各种不同的曲线运动,使肩关节、肘关节和腕关节得到较好的康复训练,从而能有效地治疗和预防各种关节疾病。
附图说明
[0039]
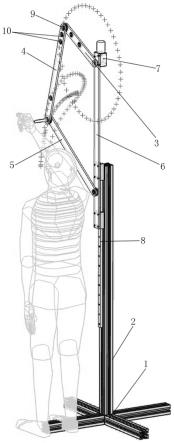
图1-图2为多姿态手臂关节训练器械虚拟样机使用状态图;
[0040]
图3为平面四连杆机构设计简图;
[0041]
图4为曲柄摇杆机构简图;
[0042]
图5为曲柄长度l1,连杆长度l2的改变对摇杆l3角速度的影响,其中,横坐标-时间t,纵坐标-摇杆l3角速度
°
/s;
[0043]
图6为无急回运动四杆机构力平衡计算;
[0044]
图7为初定组杆长数据仿真分析图;其中,a)为圆弧曲线,b) 近似椭圆曲线,c)圆周曲线;
[0045]
图8为表4中第五组杆长数据仿真分析图;其中,a)为圆弧曲线,b)近似椭圆曲线,c)圆周曲线;
[0046]
图9为表4中第七组杆长数据仿真分析图;其中,a)为圆弧曲线,b)近似椭圆曲线,c)圆周曲线;
[0047]
图10为人手部几何模型图;图11为实物样机的产品结构示意图;
[0048]
图中,1-底座,2-支杆,3-曲柄,4-连杆,5-摇杆,6-支架,7
‑ꢀ
驱动电机,8-导轨,9-端部位置孔,10-中间位置孔。
具体实施方式
[0049]
以下结合说明书附图对本发明做进一步详细描述,并给出具体实施方式。
[0050]
如图1-4所示,本发明手臂关节康复训练理疗机,包括底座、平面四连杆机构、平移机构及控制系统,其中底座上竖直设置有支杆,支杆上滑动设置有平面四连杆机构;;平面四连杆机构包括首尾依次铰接设置的曲柄、连杆、摇杆及支架,且所述支架与曲柄连接的一端上安装有驱动电机,驱动电机的输出轴与曲柄的一端相连,用于驱动曲柄做圆周运动;平移机构包括沿支杆高度方向设置的导轨、与导轨配合使用的滑块,滑块固定设置在支架上;控制系统包括plc控制器及与plc控制器电连接的触摸屏,触摸屏上设置有启动、停止及复位按键、设置有红蓝绿指示灯指示机器工作状态,触摸屏上还设置有计数功能界面,计数既可累加也可清零,动态显示训练者训练次数。
[0051]
该手臂关节康复训练理疗机的设计方法为:
[0052]
1)平面四杆机构的设置:首尾铰接设置曲柄(3)、连杆(4)、摇杆(5)及支架(6)构成平面四杆机构,其中曲柄(3)、连杆(4)、摇杆(5)及支架(6)的长度分别为l1、l2、l3和l4,其中,曲柄 l1作圆周运动,摇杆l3作圆弧运动,连杆l2上面的点作近似椭圆运动;
[0053]
2)根据曲柄摇杆机构工作原理,建立杆件矢量方程,曲柄与支架交接点为a,曲柄与连杆的交接点为b,连杆与摇杆的交接点为c,摇杆与支架的交接点为d:
[0054]
[0055]
根据杆件矢量方程(1)求解位移方程:
[0056][0057]
其中b点坐标:
[0058]
由(2)式位移方程对时间t求导得到杆件速度方程:
[0059][0060]
求解得速度:
[0061][0062]
由方程(3)对时间t求导,得到加速方程:
[0063][0064]
令:
[0065]
求解得加速度:
[0066][0067]
3)在ug nx中建立人体模型,根据曲柄摇杆机构的特点,当极位夹角θ=0
°
时,行程速比系数k=1,此时机构在工作行程阶段与空回行程阶段的平均速度相等,亦即机构具有无急回运动特性,
[0068][0069]
四杆机构无急回运动特性的条件为:
[0070][0071]
根据上述条件作曲柄摇杆机构简图,如图4所示。
[0072]
为实现四连杆不同尺寸的调整,连杆及曲柄上均设置有不同的位置孔,用于与调整连杆及曲柄的的长度,位置孔包括端部位置孔和中间位置孔,连杆和曲柄上的中间位置孔均设置有三个,连杆和曲柄上的位置孔之间通过销子轴进行连接,四连杆不同组合的尺寸为摇杆长度为600mm,支架长度为800mm固定不变,对应曲柄及连杆的长度分为三组,分别为曲柄长425m,连杆长680m,摇杆摆角为90
°
;曲柄长350m,连杆长635m,摇杆摆角为71.4
°
;曲柄长250m,连杆长 585m,摇杆摆角为49.2
°
,平面四连杆机构在1.4m-1.8m范围内任意调整高度,驱动电机转速为15r/min。
[0073]
本发明曲柄在驱动电机的驱动下做圆周运动,锻炼肩关节,摇杆做圆弧运动,锻炼肩关节,连杆做近似椭圆形运动,同时锻炼肩关节、肘关节和腕关节,锻炼者只需抓住连杆
上不同的位置孔就可使手臂做不同形式的运动。该四连杆机构,通过理论计算及基于ug nx的运动学仿真分析,实现无急回特性的圆弧运动、近似椭圆运动、圆周运动,且全程运动速度趋于匀速,基本无速度跳跃,从而实现手臂的舒适锻炼,同时滑块导轨的设置,实现四连杆机构的上下移动进而实现高度调节,方便不同身高人群使用。
[0074]
平面四连杆机构各参数设置数据的主要节点运动学分析:支架长度800mm,曲柄长度425mm,连杆680mm,摇杆长度600mm,摇杆摆角 90度,摇杆角速度变化范围41.65-64.14,该设置使得圆弧曲线运动角度范围为90
°
,向上运动范围接近90
°
,且运动过程平稳,角速度没有大起伏,能满足实际锻炼的需要。近似椭圆曲线运动角度范围为90
°
,该曲线能让手在前半程作圆弧运动,后半程让手臂弯曲作圆弧运动,能同时锻炼肩关节、肘关节和腕关节,运动过程较为平稳,角速度没有大起伏,能满足实际锻炼的需要。圆周曲线运动角度范围为360
°
,该曲线辅助手臂作圆周运动,锻炼肩关节、肘关节,运动角速度为一恒定值,能满足实际锻炼的需要。
[0075]
支架长度800mm,曲柄长度350mm,连杆635mm,摇杆长度600mm,摇杆摆角71.4度,摇杆角速度变化范围36.38-49.80,该参数设置的四连杆机构,其圆弧曲线运动角度范围为71.4
°
,向上运动范围接近71.4
°
,且运动过程平稳,角速度没有大起伏,能满足实际锻炼的需要。近似椭圆曲线运动角度范围接近90
°
,该曲线能让手在前半程作圆弧运动,后半程让手臂作直线运动,能同时锻炼肩关节、肘关节和腕关节,同时,运动过程较为平稳,角速度没有大起伏,能满足实际锻炼的需要。圆周曲线运动角度范围为360
°
,该曲线辅助手臂作圆周运动,锻炼肩关节、肘关节,运动角速度为一恒定值,能满足实际锻炼的需要。
[0076]
支架长度800mm,曲柄长度250mm,连杆585mm,摇杆长度600mm,摇杆摆角49.2度,摇杆角速度变化范围25.94-26.94,该参数设置的四连杆机构,圆弧曲线运动角度范围为49.2
°
,向上运动范围 49.2
°
,且运动过程平稳,角速度没有大起伏,能满足实际锻炼的需要。近似椭圆曲线运动角度范围为90
°
,该曲线能让手在前半程作圆弧运动,后半程让手臂直线运动,能同时锻炼肩关节、肘关节和腕关节,同时,运动过程较为平稳,角速度没有大起伏,能满足实际锻炼的需要。圆周曲线运动角度范围为360
°
,该曲线辅助手臂作圆周运动,锻炼肩关节、肘关节,运动角速度为一恒定值,能满足实际锻炼的需要。
[0077]
比较以上三种情况,机械臂运动曲线相似,但运动角度范围不同,适合不同人群的需要。
[0078]
电机扭矩计算及选择:当摇杆处于水平位置时,电机需要的扭矩最大,此时电机需要克服四杆自身重力产生的扭矩,以及手臂作用力矩,如图4所示,曲柄接近水平位置,连杆接近竖直位置,且支架、曲柄、连杆、摇杆其长度分别设为l1、l2、l3、l4,电机扭矩计算:
[0079]
[0080]
老年人手臂关节训练理疗机一般工作周期为4秒,因此选用电机转速为15r/min。
[0081]
根据扭矩及转速,考虑安全系数,选择12v 24v 600jsx-4468 型蜗轮蜗杆大力矩方形减速箱带自锁电机马达,额定扭矩为200n.m。
[0082]
本发明工作原理:以平面四连杆机构为主要机械结构,通过理论设计及nx仿真分析,最终确定四杆尺寸,能够实现圆弧运动、近似椭圆运动和圆周运动,训练者只需抓住连杆上的手柄,手臂就会被动作各种不同的曲线运动,使肩关节、肘关节和腕关节得到较好的康复训练,从而能有效地治疗和预防各种关节疾病。为了满足不同身高人群对产品的需要,设计了导轨滑块机构,方便调节四杆机构的高低。
[0083]
(1)当手抓住连架杆的底部孔时,手臂获得圆弧运动,圆弧角度可在49.2
°
、71.4
°
、90
°
中选择;
[0084]
(2)当手抓住连架杆的中部孔时,手臂获得近似椭圆运动,椭圆大小可通过调节曲柄和连架杆的杆长实现,连架杆和曲柄上都设有 3个调节孔,通过销子轴就可以实现杆长的快速调节,方便快捷;
[0085]
(3)当手抓住连架杆的顶部孔时,手臂获得圆周运动,圆周半径可在425mm、350mm、250mm中选择。
[0086]
通过试验,手臂在机构的带动下被动作圆弧运动、近似椭圆弧运动和圆周运动,机械结构稳定,机器按照预期的设计工作,性能稳定,手臂关节得到了舒适锻炼,达到了预期的设计目标。
[0087]
本发明多功能手臂关节康复训练理疗机可在老年人家庭、健身场所得到广泛的应用,辅助老年人进行手臂关节的各种康复理疗训练,从而有效减少由于关节问题引起的手臂酸疼痛等现象,提升老年人的生活品质。新型老年人用多功能手臂关节康复训练理疗机的设计可加速传统产品的更新换代,具有广阔的市场推广前景。
[0088]
验证例1:无急回运动四杆机构比较设计
[0089]
(1)初定曲柄长度l1并计算l2,初定机架l4的长度800mm,摇杆 l3的摆角为90
°
,根据图4所示几何位置关系可得:
[0090][0091]
根据式(8)计算得到:
[0092][0093]
(2)改变曲柄长度l1,计算对应连架杆长度l210组数据如表1 所示。
[0094]
(3)分析曲柄长度l1、连架杆长度l2的改变对摇杆l3角速度的影响。
[0095]
表1四杆机构尺寸
[0096][0097]
根据表1数据,在ug nx中建立四杆机构虚拟样机模型,并进行运动学仿真分析,分析曲柄长度l1,连架杆长度l2的改变对摇杆l3角速度的影响(两个周期),结果如图5所示。
[0098]
通过运动学仿真分析,同时得到摇杆l3的摆角幅度,如表2所示。
[0099]
表2摇杆l3的摆角幅度
[0100][0101]
由图5和表2可知,随着曲柄长度l1的减小,连杆长度l2也减少,摇杆l3摆角幅度也越来越小,且摇杆l3的角速度也趋于平稳。
[0102]
由图5可得摇杆角速度的变化范w如表3所示。
[0103]
表3摇杆l3角速度w的变化幅度
[0104][0105]
根据以上方案比较设计结果,选择如下3组数据作为最终设计方案,如表4所示。
[0106]
表4设计方案
[0107]
[0108][0109]
试验例2:无急回运动四杆机构力平衡、载荷变化
[0110]
四杆机构手臂关节训练器械工作时,电机载荷呈周期性变化。当摇杆l3处于水平位置时,电机需要克服四杆重力(6061al材料)及手臂作用力矩做功,此时电机所需扭矩最大,如图6所示。
[0111]
由图5可知,当杆l3水平时,杆l1接近水平位置,杆l2接近竖直位置。
[0112]
电机扭矩计算:
[0113][0114]
老年人手臂关节训练器械工作周期为4秒,因此电机转速为 15r/min。
[0115]
根据扭矩及转速,考虑安全系数,选择12v 24v 600jsx-4468型蜗轮蜗杆大力矩方形减速箱带自锁电机马达,额定扭矩为200n.m。
[0116]
试验例3:多姿态多运动形式手臂关节训练器械虚拟样机分析
[0117]
基于ug nx建立多姿态多运动形式手臂关节训练器械虚拟样机,如图1-2所示。
[0118]
无急回运动四杆机构主要节点虚拟样机仿真分析:
[0119]
(1)初定组杆长数据,表4所示主要节点运动学仿真分析
[0120]
由表4数据,建立四杆机构虚拟样机运动仿真分析模型,通过仿真分析得到三种不同的运动轨迹,如图7所示。从图7(a)可知,圆弧曲线运动范围接近90
°
,角速度没有突变,运动过程平稳。近似椭圆曲线运动图7(b)角度范围为90
°
,该曲线运动辅助手臂在前半程作圆弧运动,后半程辅助手臂弯曲作圆弧运动,能同时锻炼肩、肘和腕关节,角速度没有突变,运动过程平稳。圆周曲线运动图7(c) 作半径425、角度360
°
旋转运动,该曲线运动辅助手臂作圆周运动,锻炼肩、肘和腕关节,运动角速度为一恒定值。
[0121]
(2)第5组杆长数据主要节点运动学仿真分析
[0122]
由表4数据,建立运动学仿真分析模型,通过仿真分析得到三种不同的运动轨迹,如图8所示。图8(a)测量显示圆弧曲线运动角度范围为71.4
°
,向上运动范围接近71.4
°
,锻炼肩关节,角速度没有突变,运动过程平稳。近似椭圆曲线运动图8(b)角度范围接近 90
°
,该曲线辅助手臂在前半程作圆弧运动,后半程辅助手臂作直线运动,能同时锻炼肩、肘和腕关节,角速度没有突变,运动过程较为平稳。圆周曲线运动图8(c)作半径350、角度360
°
旋转运动,该曲线辅助手臂作圆周运动,锻炼肩、肘关节和腕关节,运动角速度为一恒定值。
[0123]
(3)第7组杆长数据主要节点运动学仿真分析
[0124]
由表4数据,建立运动学仿真分析模型,通过仿真分析得到三种不同的运动轨迹,如图9所示。圆弧曲线运动图9(a)角度范围为 49.2
°
,向上运动范围49.2
°
,锻炼肩关节,角速度没有突变,运动过程平稳。近似椭圆曲线运动图9(b)角度范围接近90
°
,该曲线辅助手臂在前半程作圆弧运动,后半程辅助手臂作直线运动,能同时锻炼肩、肘和腕关节,角速度没有突变,运动过程平稳。圆周曲线图 9(c)作半径250、角度360
°
旋转运动,该曲线辅助手臂作圆周运动,锻炼肩、肘和腕关节,运动角速度为一恒定值。
[0125]
上述姿态和运动形式,机械臂运动曲线相似,但运动角度不同,适合不同人群的需要。
[0126]
人体手臂关节活动度rom虚拟样机仿真分析:
[0127]
(1)人手部几何模型及关节运动范围
[0128]
人手部关节是由肩关节、肘关节和腕关节组成的复杂生物运动机构,可简化成三刚体七自由度的物理模型,如图10所示。
[0129]
人体手臂关节运动形式包括前屈/后伸、内收/外展、旋内/旋外3 种运动形式。其中肩关节可以进行前屈/后伸、内收/外展和旋内/旋外运动,肘关节可以进行前屈/后伸和旋内/旋外运动,腕关节可以进行前屈/后伸、内收/外展运动,各关节活动范围的数据如表5所示。
[0130]
表5关节活动方式及范围
[0131][0132]
(2)训练姿态仿真分析
[0133]
将ug建立的虚拟样机数字模型导入catia进行人机工程仿真分析,通过仿真分析人手部各关节活动的范围。
[0134]
圆弧曲线运动:通过catia v5人机工程仿真分析,摇杆做圆弧曲线运动时人体手臂跟随摇杆做圆弧曲线运动,此时肩关节做前屈运动,肘关节做前屈/后伸运动,腕关节做前屈/后伸运动,其活动范围如表6所示。对照表5,圆弧曲线运动时肩、肘和腕关节活动范围在其最大活动范围之内。
[0135]
表6圆弧曲线运动时肩关节活动方式及范围
[0136][0137]
近似椭圆曲线运动:通过catia v5人机工程仿真分析,摇杆做圆弧曲线运动时连杆做近似椭圆曲线运动,人体手臂抓住插在连杆上的手柄做近似椭圆曲线运动,此时肩关节做前屈运动,肘关节做前屈 /后伸运动,腕关节做前屈/后伸运动,其活动范围如表7所
示。对照表5,近似椭圆曲线运动时,肩、肘和腕关节活动范围均在其最大活动范围之内。
[0138]
表7圆弧曲线运动时手臂关节活动方式及范围
[0139][0140][0141]
圆周曲线运动:通过catia v5人机工程仿真分析,曲柄做圆周曲线运动时,手臂抓住插在曲柄上的手柄做圆弧曲线运动,此时肩关节做前屈运动,内收/外展运动,旋内/旋外运动,肘关节做前屈/后伸运动,旋内/旋外运动,腕关节做前屈/后伸,内收/外展运动,其活动范围如表8所示。对比表5,圆弧曲线运动时,肩、肘和腕关节活动范围均在其最大活动范围之内。
[0142]
表8圆周曲线运动时肩关节活动方式及范围
[0143][0144]
根据上述理论设计计算数据及虚拟样机动态仿真分析结果,试制了新型智能手臂
关节训练器械实物样机,通过48位试验人员的亲身体验,均感觉舒适,肩、肘、腕和腰关节都能得到较好的锻炼,实物样机如图11所示。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1