一种检测人体心率的方法与流程
1.本发明涉及健康管理技术领域,具体是一种检测人体心率的方法。
背景技术:
2.目前采用毫米波雷达监测老人病人,对目标人群监控应用需求不断增多, 但是实际中理论上和实验室中的应用案例实验已经非常成熟了。现实中实际 应用的案例很少;现在微波雷达的成本不断降低,在实际场景,例如家庭, 老人公寓或者医院等场所用于监控照顾老人或病人的目标人群的,将不断采 用微波雷达的越来越多。采用微波雷达检测心率和呼吸率的应用很多,但是 其精准性和实时性还有很大的提高空间。呼吸率的检测比较容易,误差极低。 但是心率的检测确需要更多的数据和准确性。雷达心跳检测一大挑战在于呼 吸及其谐波强干扰。因此采用连续波多普勒雷达体征检测,分离出心肺信号, 利用捕捉微动目标引起的胸壁频移来计算得出心率数据。但是当目标处于运 动状态时就会产生各种干扰;使计算误差增大。
3.因此,本领域技术人员提供了一种检测人体心率的方法,以解决检测不 够准确,容易误报或者延误报警的问题。
4.现有技术的心率和呼吸率的雷达监测系统都是在实验室中定向测定的;
5.如果在家庭中这种系统的实际使用极少,而且还不够实用;原因除了成 本问题外,还有就是系统的准确和实时性能不够。
技术实现要素:
6.本发明的目的在于提供本发明方案提出了一种检测人体心率的方法,以 解决上述背景技术中提出的问题。
7.为实现上述目的,本发明提供如下技术方案:一种检测人体心率的方法, 包括以下步骤:
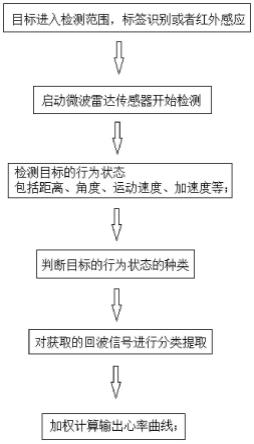
8.步骤1:启动雷达探测系统,包括设置被动识别标签或者设置红外感应装 置,以用于探测有目标存在时,启动雷达探测系统,当特定区域不存在探测 目标时,关闭雷达系统,以节约系统用电;
9.步骤2:当识别到存在监控目标时,控制毫米波的调频连续波雷达向所述 目标发射微波及接收回波信号,并跟踪定位目标的运动方向;
10.步骤3:基于fmcw雷达判断目标的运动状态,对目标进行生物特征识 别,应用于终端设备,所述终端设备配置有毫米连续波雷达,实时监测以下 信息:
11.基于所述回波信号,实时计算出所述目标距离毫米连续波雷达的所述距 离信息;
12.基于所述回波信号,实时计算出所述目标胸前相对雷达所处的角度信息;
13.基于所述回波信号,实时计算出所述目标相对雷达的所述运动速度和运 动方向信息,包括平面运动状态和高度方向的运动状态;
14.步骤4:基于回波信息,控制所述fmcw雷达执行相应的计算指令;
15.根据对以上回波信息进行滤波处理,提取心率数据,根据步骤3:基于 fmcw雷达判断目标的运动状态,所述判断目标的状态至少分为四种,分别 为正向运动状态和正向静止状态,非正向运动状态和非正向静止状态;对四 种状态的回波信号的滤波采用不同的方法,分别提取心率数据;
16.步骤5:依据不同状态下的监测数据,设置不同的权重,加权计算出心率 数据,输出心率曲线图。
17.当目标处于非正向运动状态时,启动采用mimo天线的fmcw雷达(或 者采用多个fmcw雷达)检测,以提高目标角度变化的检测数据准确性,分 别获取不同方位的回波信号,分别计算出不同反射波的心率值。
18.采用时分多路复用的方式对目标发射信号,同时采用多路的adc模块采 集数据,获取不同时间间隙的回波信号,基于不同角度的回波信号进行回波 信号处理,通过计算获取心率数据;
19.分别获取目标不同运动状态的回波信号,依据预设权重比例,根据对以 上回波信号进行滤波处理,提取心率数据,根据步骤2:基于fmcw判断目 标的运动)状态,判断对四种回波信号提取不同的权重,计算更加精准的心 率数据;
20.根据目标的不同状态设置一个t时间段的目标状态数据,依据t时间段 的目标状态变化,分别同时统计不同状态的回波信号的比例,再依据权重值 计算更加精准的心率数据。
21.所述统计时间段的t值依据目标状态的变化而变化,当目标一直处于运 动状态时,相应的时间超过系统设定的前一个t时间段时,相应的系统统计 时间周期也相应的调整延长,相应如果统计周期小于前一个周期的t时间段, 紧接着的t时间段相应的缩短;
22.同时记录心率曲线,依据心率曲线统计正常心率曲线和异常心率曲线, 分别进行对比,分析不同状态心率变化,提取对应不同状态的心率曲线,计 算比例权重;
23.基于预设权重,将所述fmcw雷达的发射和接收微波信号进行加权计算 获得平均值,进行融合计算,以获得所述目标用户的心率值,同时统计心率 曲线图;
24.所述权重依据所述实时心率曲线与预存心率曲线的对比计算调整权重 值,获取当前状态的时间间隔,每个时间间隔再分成各个瞬时值的叠加,获 取当前时间的瞬时权重值;计算所述当前时间点的瞬时心率值及对应的权重 值的积;判断所述积是否大于预设值;若是,将所述瞬时心率值作为当前时 间点的输出心率值输出;若否,计算所述历史时间点对应的权重值的积、以 及当前时间点的瞬时心率值及权重值的积的加权和;判断加权和是否大于预 设值,若是,则计算所述加权和与时间点的权重值和的比值;将所述比值作 为当前时间点的输出心率值输出。
25.所述fmcw雷达采用基于双频段fmcw雷达的人体动作识别方法,所 述mimo天线的fmcw雷达的天线数量采用四个;对回波信号数据进行处理、 特征提取与特征融合得到心率值,此时接收滤波adc的数量是mimo天线 数量的二倍。
26.所述的mimo天线采用间隙波导结构,天线矩阵阵元之间的距离最大设 置为半个波长,传输模式采用te10模式。
27.所述目标的状态分为静止状态、运动状态,所述运动状态又分为低速运 动状态和高速运动状态,对回波信号的处理依据目标所处的状态划分为多个 数据段,分别采取不同
的滤波和算法计算获取心率,将各个状态的回波信号 再依据瞬时数据叠加获取瞬时平均心率,最后加权获取心率均值。
28.与现有技术相比,本发明的有益效果是:本发明中采用分时,分频的复 用雷达波,进行目标人体的心率检测,同时根据目标人体所处的状态不同, 采用不同的回波处理方法,同时根据不同状态(以时间段加权)设定不同权 重的计算取值,通过计算获得心率均值,并获取心率曲线图,进行存储,同 时获取不同次监测心率曲线图进行对比,实时调整监测的时间t的取值范围, 采用mimo天线的fmcw雷达,同时为了获取更加精准的回波信号数据,可 以采用多通道实时采集的办法,也可以使用两者的混合方式;在使用多通道 实时采集的结构时,需要使用多通道adc(多通道adc虽然成本增加了, 但是监测的准确和效率提高了,对运动中的目标监测更加精准),为了降低方 案的落地成本,可以采取双频的,四个天线数量的mimo雷达。
29.本发明方案同时避免检测人员的隐私问题。采用调频连续波雷达的创新 方法获取呼吸率更加准确。
附图说明
图1为发明的检测方法的流程示意图。
具体实施方式
30.下面将结合本发明实施例中的附图1,对本发明实施例中的技术方案进行 清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而 不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做 出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
31.为实现上述目的,本发明提供如下技术方案:本发明的目的在于提供本 发明方案提出了一种检测人体心率的方法,以解决上述背景技术中提出的问 题。
32.为实现上述目的,本发明提供如下技术方案:一种检测人体心率的方法, 包括以下步骤:步骤1:启动雷达探测系统,包括设置被动识别标签或者设置 红外感应装置,以用于探测有目标存在时,启动雷达探测系统,当特定区域 不存在探测目标时,关闭雷达系统,以节约系统用电;
33.步骤2:当识别到存在监控目标时,控制所述雷达向所述目标发射微波及 接收回波信号,并跟踪定位目标的运动方向;
34.步骤3:基于fmcw雷达判断目标的运动状态,对目标进行生物特征识 别,所述调频连续波雷达采用毫米波雷达,实时监测以下信息:
35.基于所述回波信号,实时计算出所述目标距离毫米波连续波雷达的所述 距离信息;
36.基于所述回波信号,实时计算出所述目标胸前相对雷达所处的角度信息;
37.基于所述回波信号,实时计算出所述目标相对雷达的所述运动速度和运 动方向信息;包括平面运动状态和高度方向的运动状态;
38.步骤4:基于回波信息,控制所述fmcw雷达执行相应的计算指令;
39.根据对以上回波信息进行滤波处理,提取心率数据,根据步骤2判断目 标的运动
状态,将目标的状态至少分为四种,分别为正向运动状态和正向静 止状态,非正向运动状态和非正向静止状态;对四种状态的回波信号的滤波 采用不同的方法,分别提取心率数据;
40.当目标相对于雷达信号处于正向或非正向静止时,采用fmcw雷达的检 测信号,此时对单帧中频信号进行处理即可;
41.当目标处于运动状态时,此时fmcw雷达的检测信号采用双频段;
42.当目标相对于雷达处于非正向运动状态时,启动mimo天线的fmcw雷 达,以提高目标角度变化的检测数据准确性,启动分别获取不同方位的回波 信号,分别计算出不同反射波的心率值;为了降低成本,采用四个天线的 mimo天线雷达即可;此处只是天线数量的设置问题,在实际应用过程中以 获取低成本高精度监测数据为原则。
43.步骤5:依据不同状态下的监测数据,设置不同的权重,计算出更加精准 的心率数据,输出心率曲线图;
44.当目标相对于雷达处于非正向运动状态时,采用时分多路复用的方式对 目标发射信号,同时采用多路的adc模块采集数据,获取不同时间间隙的回 波信号,基于不同角度的回波信号进行回波信号处理,通过计算获取心率数 据;尤其时探测多个目标时,对目标的生物特征识别用于区分不同目标。
45.通常基于呼吸频率典型范围为0.1hz~0.5hz、心率范围为1hz~3hz这一 事实,对回波信号进行滤波去噪,分离出心率信号数据;
46.以上依据回波区分目标运动状态进行回波分类,也可以根据目标的生物 特征识别区分不同目标,同时对目标的不同运动状态进行区别出更多的状态 分类。
47.也可以基于模糊逻辑技术的雷达回波进行分类,雷达回波分类根据不同 环境下的具体场景进行分类,例如在室外,处于下雨或者雾气浓密的环境下, 此时基于模糊逻辑技术的雷达回波进行分类计算的回波数据处理的结果更加 准确;不同分类后不同状态的探测和回波处理算法不同,每种算法选用不同 的特征量联合并分配权重,对选用的每个特征量,然后加权平均;获取准确 的心率值,同时获取心率曲线,通过对历史数据,即不同环境下的心率曲线 图进行对比,可以得出不同环境下的目标的身体参数;可以用于具体不同环 境状态下目标人体身体健康资料的统计分析,作为医生诊断或目标健康参考。
48.预设权重比例,根据对以上回波信号进行滤波处理,提取心率数据,根 据步骤2:基于fmcw判断目标的运动状态,判断对四种回波信号提取不同 的权重,计算更加精准的心率数据;通常权重均分,来求均值,当目标运动 状态变化较大时,依据不同状态中单个状态的持续时间调整求值权重,
49.根据目标的不同状态设置一个t时间段的目标状态数据(例如一分钟60s 的数据),依据t时间段的目标状态变化,分别同时统计不同状态的回波信号 的比例,再依据权重值计算更加精准的心率数据;实际应用中时间t一般在1 分钟到10分钟之间等实际变化不同时间周期。
50.所述统计时间段的t值依据随着目标状态的变化而变化,当目标一直处 于运动状态时,相应的时间超过系统设定的t时间段时,相应的系统检测统 计时间周期也相应的调整延长;
51.同时记录心率曲线,依据心率曲线统计正常心率曲线和异常心率曲线, 分别进行
对比,分析不同状态心率变化,提取对应不同状态的心率曲线,计 算比例权重;
52.基于预设权重,将所述fmcw雷达的发射和接收微波信号进行加权计算 获得平均值,进行融合计算,以获得所述目标用户的心率值,同时统计心率 曲线图;
53.所述权重依据所述实时心率曲线与预存心率曲线的对比计算调整权重 值;
54.所述心率检测计算权重的比例是与各个状态的时间相关的,获取当前状 态的时间间隔,每个时间间隔再分成各个瞬时值的叠加,值获取当前时间的 瞬时权重值;计算所述当前时间点的瞬时心率值及对应的权重值的积;判断 所述积是否大于预设值;若是,将所述瞬时心率值作为当前时间点的输出心 率值输出;若否,计算所述历史时间点对应的权重值的积、以及当前时间点 的瞬时心率值及权重值的积的加权和;判断加权和是否大于预设值,若是, 则计算所述加权和与时间点的权重值和的比值;将所述比值作为当前时间点 的输出心率值输出。上述心率检测得出的输出给用户的心率值较为准确,增 强了用户的使用体验。
55.当测得瞬时速度值和加速度值与瞬时频率进行比对,此时当目标远离雷 达时和靠近雷达运动时所获取得的回波信号的结果需要考虑方向问题,此时 与速度和加速度的方向进行匹配,在瞬时速率和频率值(瞬时频率可以获得 瞬时时间)的关系求解中获取瞬时心率。通过雷达获取当前时间点的瞬时心 率值,采集回波的频率差,可采用计算出当前时间点与前一时间点的时间差, 求时间差的倒数,该倒数作为当前时间点的瞬时心率值,计算如公式:
[0056][0057]
h为瞬时心率值,t0为当前时间点,t1为t0的相邻的前一时间点。然后 加权处理。本发明重点保护的是解决问题的方法,这里就不做数学详细的计 算说明了。
[0058]
所述fmcw雷达采用基于双频段fmcw雷达的人体动作识别方法,所 述mimo天线的fmcw雷达的天线数量采用四个;对回波信号数据进行处理、 特征提取与特征融合得到心率值。基于成本的考虑,连续波可以采用双频段, mimo天线的fmcw雷达采用4个天线数量的mimo雷达,同样可以实现 精准监测心率数据的采集。当然处于多目标监测时,采用时分多路复用的方 式对目标发射信号,同时采用多路的adc模块采集数据,获取不同时间间隙 的回波信号,此时基于成本和计算的考虑接收滤波adc的数量是mimo天 线数量的二倍;基于不同角度的回波信号进行回波信号处理,通过计算获取 心率数据。
[0059]
具体实施中,以上的mimo天线的微波雷达采用间隙波导结构,天线矩 阵阵元之间的距离最大设置为半个波长,主要的传输模式为te10模式。需要 注意的是本发明方案中的间隙波导与矩形波导是有区别的,间隙波导需要两 排金属电磁带间隙结构,此结构对电磁波的泄露能有效拟制,是专门为mimo 天线的毫米波雷达设计。
[0060]
我们知道雷达探测目标的原理是要目标有运动,呼吸率的探测是有微小 的运动,即呼吸和心跳的运动,进行滤波处理,将呼吸运动和心跳运动进行 不同幅度的计算后滤除干扰项,当目标处于自身运动时,相对运动和角度的 变化,对雷达的干扰项就会增加,因此,当目标处于运动中的探测,和目标 处于静止的探测数据处理也就不同,根据mimo天线的fmcw雷达的探测精 度,对多目标运动中的探测数据的算法分析,对数据进行分离得出多个精准 的心率数据;在家庭或者医院等环境使用时,探测目标均为特定目标,此时 再根据
目标的生物特征进行区别,实时的探测数据进行实时分离,包括时间 和空间(包括各个状态)的数据瞬时采集瞬时分离,通过匹配的算法得出心 率数据。
[0061]
在以上系统算法,利用毫米波雷达获取人体心率的方法上提出以下创新 算法,普通成年人的心跳、呼吸的位移、频率参数如下:
[0062]
生命体征频率振幅振幅呼吸率(成人)0.1-0.5hz~1-12mm~0.1-0.5mm心率(成人)0.8-2.0hz~0.1-0.5mm~0.01-0.2mm
[0063]
现在通过雷达探测由于目标微小振动所引起的在特定范围差的fmcw雷 达信号的相位变化,因此提出基于以下方法来获取生命体征信号,采用调频 连续波雷达通常按照以下具体方法:
[0064]
1)、对adc数据执行快速傅立叶变换以获取变化范围曲线;
[0065]
具体如下:为了进一步增强心率信号并消除回波信号中的相位漂移,对 相位展开后的波形进行差分处理;相位差分是通过不断将当前采样点展开相 位与前一采样点做差实现,由于呼吸频率通常在0.1~0.6hz范围内,心跳频 率通常在0.8~3.3hz范围内,采用iir数字带通滤波器初步分离呼吸信号与 心跳信号,针对两组信号做快速傅里叶变换,根据其幅频特性曲线中的最大 值即可判断主要频率成分,进而转换为呼吸率与心率,提取呼吸率曲线进行 下一步处理;(这里同样方法可以获取呼吸率曲线进行处理);
[0066]
2)、通过雷达的与人体的大致位置关系,可以确定目标的距离范围,通 过在该范围内搜索最大值,获取目标对应的范围差;
[0067]
3)、提取目标间隔处的相位;
[0068]
4)、重复以上步骤
①②③
三个阶段循环,帧周期是50ms,即每一个 帧周期内提取一次目标的相位,若目标与距离的径向距离发生变化,则需要 根据范围差追踪算法得出此时的范围差,然后提取相位,循环发射n帧,即 可得到目标的相位随帧数的取值变化,也可看作目标相位与时间的关系,记 做振动信号
[0069]
5)、相位解缠绕,由于相位值在[-π,π]之间,而我们需要展开以获 取实际的位移曲线。因此每当连续值之间的相位差大于/小于
±
π时,通过从 相位中减去2π来执行相位展开;
[0070]
6)、通过减去连续的相位值,对展开的相位执行相位差运算。这有助于 增强心跳信号并消除任何相位漂移;
[0071]
7)、依据心跳和呼吸频率的不同,利用带通滤波器滤波将相位值进行滤 波以进行区分;
[0072]
8)、范围估计,对相位信号做快速傅里叶变换,依据峰值大小及其谐波 特征,获取n个帧(4=《n=《10)时间内对应的心跳频率;
[0073]
9)、判断,记录一段时间内的心跳频率,根据不同的置信度指标判断此 时的心跳频率,并输出呼吸频率随时间变化的关系;
[0074]
10)、在对相位进行滤波后,此处通过将样本进行分割,设置阈值去判断 是否符合心率的变化范围,并选取稳定装态下的数据进行下一步的估计;最 终获取心跳频率曲线。
[0075]
此处的目的是减少人身体的相对位置移动而对心率测量造成的影响。因 为心率的测量是基于心脏收缩和舒张的微小运动产生的距离差,而引起的相 位变化,依据微波多
普勒原理,当人的身体出现大幅摆动时,将会对其准确 性造成影响;采用此方法与求呼吸频率类似,最终获得生命体征信号。
[0076]
本发明的工作原理是:本发明方案中,采用创新的雷达检测方法,创新 的雷达回波数据处理方法,使得对人体生命特征的检测更加准确。
[0077]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不 局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根 据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明 的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1